基于LSTM-PPO算法的无人作战飞机近距空战机动决策
2022-07-13丁达理谭目来吕丞辉
丁 维, 王 渊, 丁达理, 谢 磊, 周 欢, 谭目来, 吕丞辉
(空军工程大学航空工程学院,西安,710038)
随着无人作战飞机(unmanned combat aerial vehicles,UCAV)的自主化、智能化水平不断提高,由其自主完成空战任务获取制空权已成为未来战场发展的必然趋势。其中,空战机动决策方法一直是自主空战领域研究的重要一环[1-2]。目前无人机空战机动决策常用方法主要分为两类,一类是基于对策理论的方法,另一类是基于数据驱动的方法。基于对策理论的方法应用在近距空战机动决策上主要有微分对策法[3]、矩阵对策法和影响图法[4],基于数据驱动的近距空战机动决策方法主要有神经网络及强化学习方法。
文献[5]将微分对策法应用于空战追逃问题,构建了微分对策模型,现阶段虽然应用较为广泛,但其计算量太大、实时性差,且其目标函数设定非常困难,因此不适用于复杂的空战环境;文献[6]应用矩阵对策法获得我机最优选择策略的大致范围,虽然算法容易理解,但是其结果精度不高且实时性较差,因此较难应用于无人机自主空战中;文献[7]将影响图法应用于机动决策,虽然能有效引导UCAV战斗,但是模型结构复杂,计算繁琐且实时性较差,很难求解出较复杂的决策问题。对于基于数据驱动空战机动决策方法而言,文献[8]应用神经网络方法,虽然鲁棒性强、实时性好,但是需要大量样本进行训练且产生的数据不真实;文献[9]运用强化学习方法由环境反馈出的信息来展开学习,虽然无需提供训练样本,但是却存在训练时间长、执行效率低的缺点。
针对UCAV近距空战机动决策问题,本文首先在UCAV三自由度模型的基础上构建飞行驱动模块,以此来实现深度强化学习过程中与环境的不断交互,并形成一种状态转移更新机制。在算法层面,针对现有常用方法存在的无法满足实时性、收敛速度慢、容易陷入局部最优等不足,本文以近端策略优化(proximal policy optimization,PPO)算法[10]为基础,充分发挥神经网络离线训练的可塑性和在线使用的实时性,通过引入OU随机噪声进一步提升算法在训练过程中的探索性能,引入长短时记忆网络(long short term memory,LSTM)[11]将空战状态转化为高维感知态势,加强网络对时序性空战数据的学习能力,从而提出基于长短时记忆-近端策略优化(long short term memory-proximal policy optimization, LSTM-PPO)算法的UCAV近距空战机动决策方法。通过设计不同的近距空战仿真实验,并与PPO算法作性能对比,验证该方法的有效性和优越性。
1 空战环境设计
1.1 UCAV三自由度模型设计
UCAV三自由度模型是对UCAV运动状态的具体描述,为了降低控制量之间的耦合关系,并充分考虑平台气动特性对飞行状态的影响,使模型更加贴近实际,飞行轨迹更为真实,增加其工程利用价值,其三自由度质点运动、动力学模型如下:
(1)
式中:(x,y,z)分别代表速度v在坐标系各个轴上的分量;γ为航迹倾角;ψ为偏航角;m为UCAV总体质量;g为重力加速度;(α,μ,T)为模型的控制量,分别表示当前时刻UCAV的攻角、滚转角及推力;L和D分别表示升力参量和阻力参量,具体可以表示为:
(2)
1.2 状态转移更新机制设计
为实现算法与空战环境不断交互,从而输出控制量对UCAV的运动进行控制,将上述三自由度模型设置成飞行驱动模块。假设UCAV与敌机使用相同的平台模型,通过飞行驱动模块实现敌我双方空战状态的更新,即通过当前时刻状态与控制量实时计算出下一时刻UCAV与敌机所处的新状态,以此形成一种状态转移更新机制,见图1。

图1 状态转移更新机制
1.3 奖励函数设计
基于强化学习的近距空战机动决策的目标是找到一个最优机动策略使UCAV完成攻击占位,从而使完成当前任务的累计奖励最大。奖励是评价策略的唯一量化指标,决定智能体最终学到策略的优劣,并直接影响算法的收敛性和学习速度。UCAV通过深度强化学习进行空战决策时,除完成任务的奖励外,中间过程无法获得奖励,存在着稀疏奖励[12]的问题,因此在复杂的空战任务中不仅需要设计完成任务的胜负奖励,对于每一回合中每一步的辅助奖励设计也至关重要。为了有助于验证算法的有效性,本文以机动决策难度较大的使用近距空空导弹后半球攻击策略为例,分别设计角度、高度、距离奖励函数。
1.3.1 角度奖励函数

(3)
1.3.2 距离奖励函数

(4)
式中:相对距离
1.3.3 高度奖励函数
高度奖励的设置应充分考虑不同武器的作战性能,主要体现为通过高度奖励使UCAV与敌机的高度差保持在理想范围内,充分发挥武器性能。设计高度奖励函数rH如下:
(5)
式中:ΔH代表UCAV与目标的相对高度;ΔHup和ΔHdown分别表示理想高度差的上下限。
1.3.4 胜负奖励函数
空战胜负判定主要分为3种情况:①飞行高度过低导致坠毁;②态势占据劣势被敌机击中回合失败;③占据态势优势满足导弹发射条件,空战胜利。
胜负回报奖励函数设计如下:
(6)
其中end为UCAV胜负判定结果,可以表示为:
(7)
1.3.5 单步综合奖励设计
空战中需要综合考虑角度、距离、高度对空战态势的影响,即在空战中设置每一步的综合奖励。综合奖励的设计是将角度、距离、高度等因素设置权重值,并与胜负奖励函数相加计算单步综合奖励。具体设计如下:
rtotal=W1rA+W2rR+W3rH+rend
(8)
式中:W1、W2、W3分别表示角度、距离、高度奖励对应的权重,在近距空空导弹后半球攻击策略中由于对角度奖励要求较高,因此设置W1=0.5,W2+W3=0.5。
2 LSTM-PPO算法
2.1 PPO算法
PPO算法是由学者Schulman提出的一种新型的深度强化学习算法,在策略梯度算法的基础上以演员-评论家(actor-critic,AC)算法为架构演化而来,可以应用在连续的状态和动作空间中[14]。它和其他基于深度强化学习算法相比优势如下:①将新旧策略的更新步长限制在一个合理区间上,让其策略变化不要太剧烈,这样就解决了策略梯度算法无法解决的步长难以选择的问题;②PPO算法的参数更新方式能够保证其策略一直上升即在训练过程中值函数单调不减;③利用重要性采样原理来离线更新策略,避免浪费更新完的数据。
PPO算法的目标函数为:
(9)
其中:
(10)

2.2 LSTM网络
LSTM网络的每个单元可以被划分为遗忘门ft、输入门it、以及输出门ot[15]见图2所示。
乡土树种具有适应当地气候条件,成活率高、生长快,充分代表了当地的文化特色和地域特色,且乡土树种是经过长时间沉淀积累下来的适宜本土生长的植物种类;乡土树种运输费用以及种植费用低,维护管理成本也低。为此在绿化树种选择上,要坚持以乡土树种为主,实践得知,美丽乡村绿化绿化乡土树种占绿化苗总量应把握在65%左右。除此之外,为增加生物多样性及观赏性,适当引进一些优良适生树种,丰富植物种类。
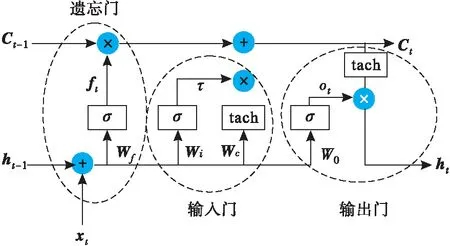
图2 LSTM单元结构图
其中,遗忘门主要利用sigmoid函数,决定上一时刻网络的输出ht-1和上一时刻网络的单元状态Ct-1是否继续存在于当前时刻网络的单元状态Ct中。遗忘门计算公式如下:
ft=σ(Wf·g[ht-1,xt]+bf)
(11)
式中:Wf为权值矩阵;bf为偏置量;xt为当前网络的输入;g表示向量拼接。
输入门利用sigmoid函数输出的信息与tach函数输出的信息相乘,决定当前时刻的输入xt有多少要传到单元状态Ct中。输入门计算公式如下:
it=σ(Wi·g[ht-1,x1]+bi)tach(Wc·g[ht-1,xt]+bc)
(12)
输出门也是利用sigmoid函数与tach函数输出的信息相乘,决定单元状态Ct中有多少可以传到当前输出ht中。输出门的计算公式如下:
ht=σ(W0·g[ht-1,xt]+b0)·tach(Ct)
(13)
2.3 OU随机噪声
在训练过程中,平衡算法的探索能力和开发能力至关重要,探索的目的在于寻找到更优的策略。作为引入的随机噪声,OU噪声在时序上具备较高斯噪声更好的相关性,能够较好地探索具备动量属性的环境,在进一步提升动作决策随机性的同时可以更好地约束探索的区间,减少超出阈值机动的产生。图3为基于OU随机噪声探索策略示意图。OU噪声的微分方程形式如下:
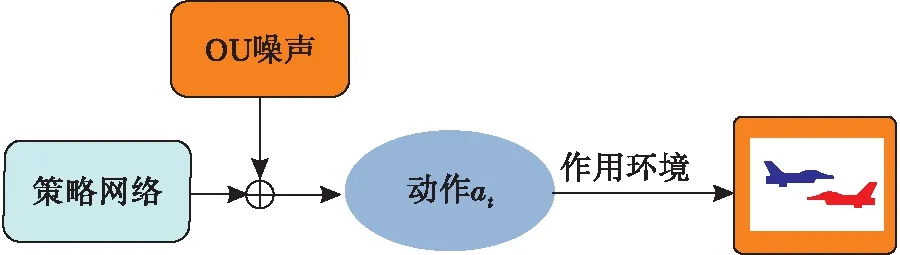
图3 基于OU噪声探索策略
dxt=-θ(xt-μ)dt+σdWt
(14)
式中:xt表示状态;Wt代表维纳过程;θ、μ、σ均为参数。
2.4 LSTM-PPO算法
为了增强PPO算法的探索性,本文通过在输出动作上加入OU随机噪声来提升UCAV对未知状态空间的探索能力。又因为空战环境具有高动态、高维度的博弈性和复杂性,因此单纯采用PPO算法中的全连接神经网络来逼近策略函数和价值函数已无法满足其复杂性的需求。本文的策略网络及价值网络使用LSTM网络架构,首先引入LSTM网络从高维空战态势中提取特征,输出有用的感知信息,增强对序列样本数据的学习能力,再通过全连接神经网络来逼近策略函数及价值函数。LSTM-PPO算法的架构见图4。
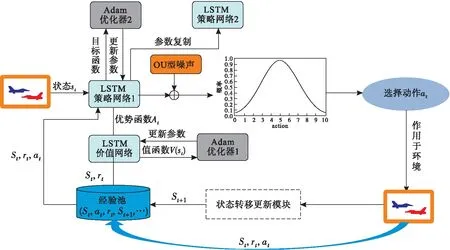
图4 LSTM-PPO算法架构图
2.4.1 策略网络设计
针对策略网络部分,输入层设置12个节点,对应着UCAV和敌机的12个状态量s=[x,y,z,v,γ,ψ,xe,ye,ze,ve,γe,ψe],其中(x,y,z)表示UCAV的坐标,v为UCAV的速度,γ、ψ分别代表UCAV的航迹倾角及偏航角,(xe,ye,ze)表示敌机的坐标,ve为敌机的速度,γe、ψe分别表示敌机的航迹倾角及偏航角;隐藏层分别设置LSTM网络层及全连接层,LSTM网络层设置3个网络单元,全连接层设计为3层,均采用tach为激活函数;输出层有3个节点,分别对应着UCAV滚转角变化量Δμt、攻角变化量Δαt及推力变化量ΔTt,采用softmax为激活函数。策略网络结构图见图5。
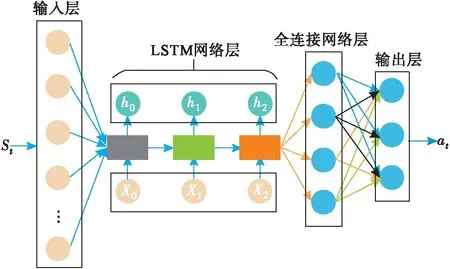
图5 策略网络结构图
2.4.2 价值网络设计
针对价值网络部分,输入层设置了15个节点,对应着UCAV和敌机的12个状态量s=[x,y,z,v,γ,ψ,xe,ye,ze,ve,γe,ψe]及当前策略网络生成的控制量变化量at=[Δμ,Δα,ΔTt]的合并;隐藏层中的LSTM网络层设置3个网络单元,全连接层设计为3层,均采用tach为激活函数;输出层设置一个节点,对应着状态值函数,采用Linear为激活函数。价值网络结构图见图6。
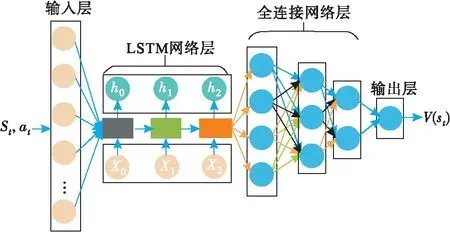
图6 价值网络结构图
3 仿真实验
3.1 场景设计
本文以UCAV与敌机一对一近距空战为背景进行仿真分析,设置3组仿真实验,分别为敌机采取随机机动策略,基于专家规则库的机动策略和基于优化算法的机动策略。设每个epoch包含200个训练回合,每回合的仿真步长设为30步,每一步的决策时间为0.05 s,UCAV与敌机对抗900个epoch后停止学习。UCAV的速度为300 m/s,航迹倾角和航迹偏角均为0°,敌机的速度为250 m/s,航迹倾角为0°,航迹偏角为180°。参数设置如表1所示,利用表1中的参数结合LSTM-PPO算法对所设计的空战场景进行仿真。
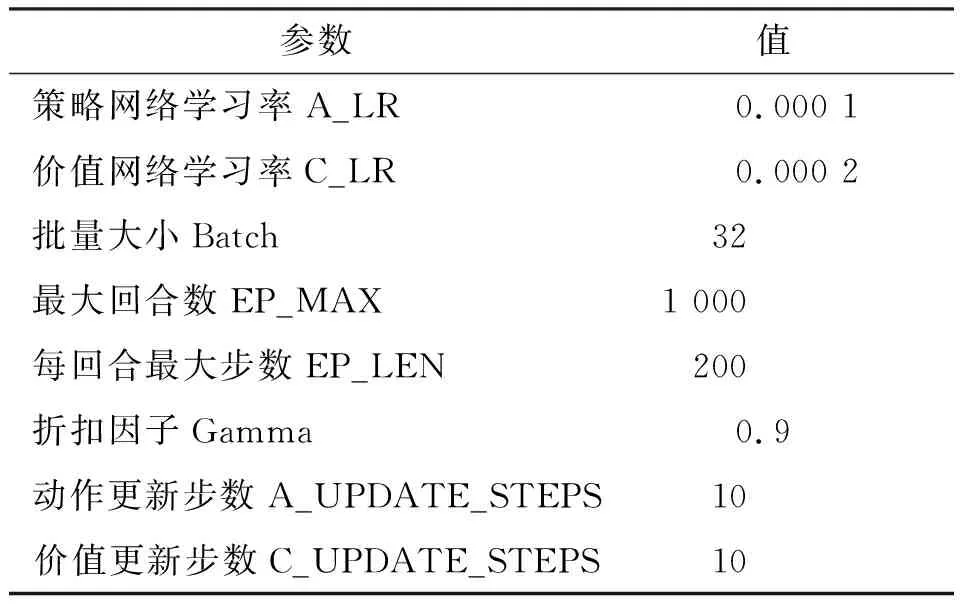
表1 参数设置
3.2 仿真结果
3.2.1实验1:敌机采取随机机动策略
该策略下,针对敌机选择缓慢向上爬升的随机机动动作,UCAV首先平飞再通过缓慢爬升接近敌机,形成后半球攻击态势并使敌机进入我机导弹攻击区,进而取得空战胜利。图7为UCAV与敌机空战对抗轨迹图。
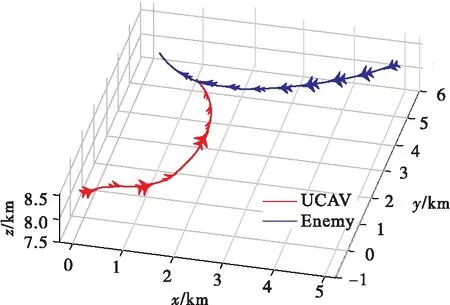
图7 空战对抗轨迹图(实验1)
图8为反映两机对抗相对优势的累计奖励曲线,横坐标每个epoch包含了200个训练回合,纵坐标为200个训练回合所获得累计奖励的平均值。从图中可以看出,训练初期由于UCAV学习不到任何有效策略导致坠毁或被敌机击落,使得累计奖励不断减小,到了训练中期由于我机能够保持平飞,避免了训练前期坠毁的情况,因此累计奖励值逐步增大,最终在约400个epoch的训练下能够学习到有效的机动动作,形成后半球攻击态势,此时累计奖励值收敛。
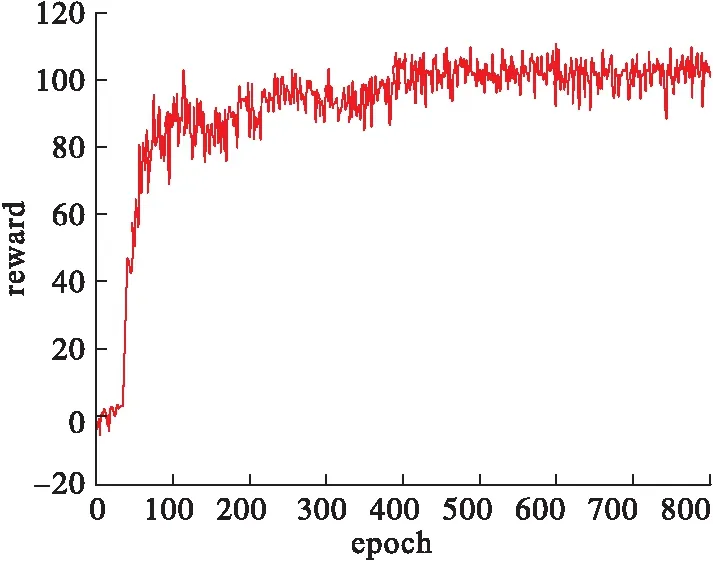
图8 累计奖励曲线(实验1)
3.2.2实验2:敌机采取基于专家规则库的机动策略
该策略下,针对敌机采取迂回盘旋机动动作[16],我方UCAV首先通过缓慢爬升接近敌机,再采取突然俯冲机动跟随敌机,当敌机采取左转缓慢俯冲动作欲完成逃逸时,UCAV通过小过载爬升机动形成后半球攻击态势,并使敌机进入我机导弹攻击区进而取得空战胜利。图9为该场景下的空战对抗轨迹图。
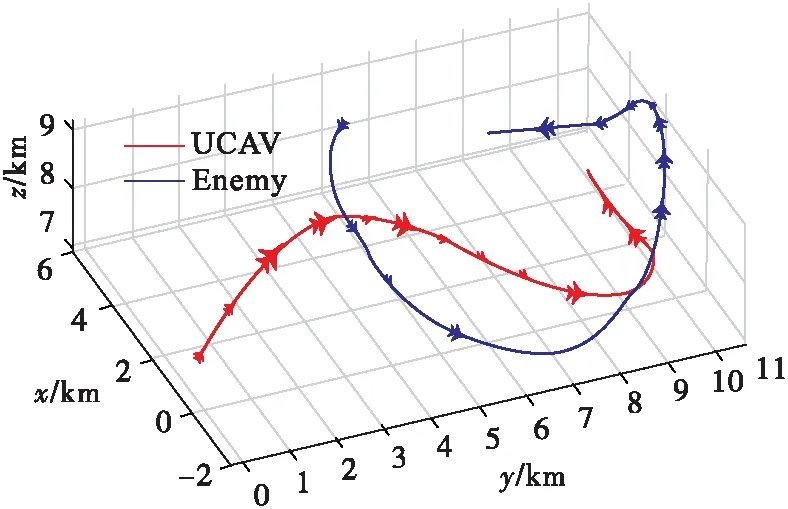
图9 空战对抗轨迹图(实验2)
从图10的累计奖励曲线中可以看出,初始阶段由于我机对环境认知不足,学习不到较好策略导致出现高惩罚值行为,之后通过训练逐步掌握了能够尾随敌机的策略,最终在约600个epoch的训练下策略不再大幅变化,此时奖励值收敛。
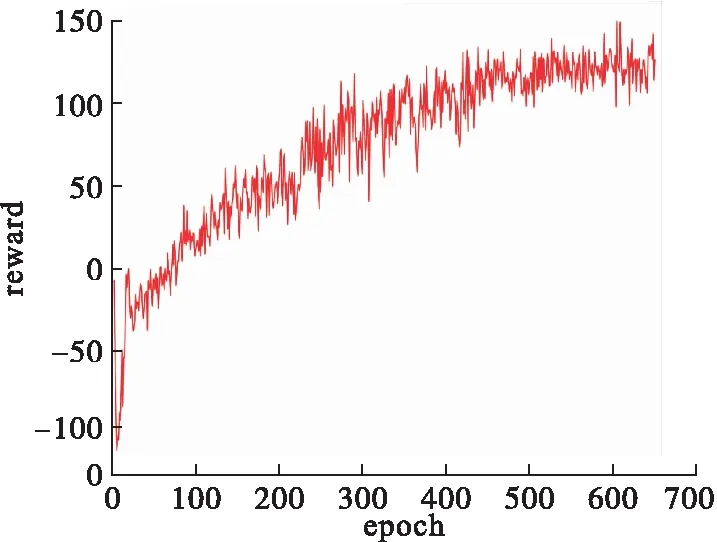
图10 累计奖励曲线
3.2.3实验3:敌机采取基于优化算法的机动策略
由于敌机具有一定的策略[17],因此对抗博弈程度较实验1剧烈很多。开始由于UCAV高度处于劣势,因此敌机欲采取筋斗机动完成逃逸,此时UCAV交替执行平飞与爬升机动接近敌机并与敌机抢占高度优势。当敌机抵达最高点开始向下俯冲,UCAV完成爬升获得高度优势后,UCAV跟随敌机进行俯冲,从而在获得后半球角度优势的情况下达到武器发射条件,最终取得空战胜利。图11为该场景下的空战对抗轨迹图。
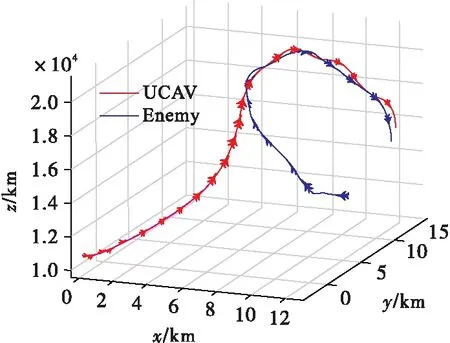
图11 空战对抗轨迹图(实验3)
从图12的曲线变化趋势可以看出由于敌机飞行具有一定的策略,因此收敛速度比较慢且奖励值曲线波动较为剧烈,体现出了空战任务的复杂性,在大约720个epoch的训练下累计奖励值收敛,完成学习。
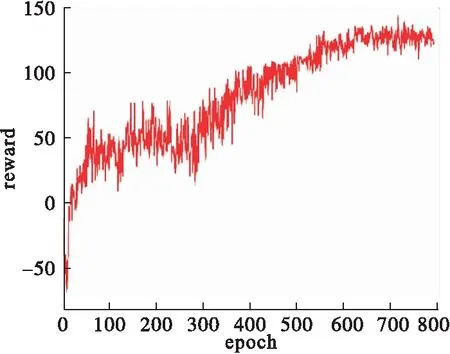
图12 累计奖励曲线(实验3)
3.3 算法对比分析
将PPO算法和LSTM-PPO算法设置相同的超参数,并使用相同的空战环境,经过900个epoch训练后选取前800个epoch进行测试。以平均奖励值、收敛时间、空战获胜概率作为衡量两种算法性能的重要指标,进行两种算法在实验1和实验2下的性能对比分析,见表2~3。可以看出,LSTM-PPO算法平均奖励值和获胜概率均大于PPO算法,收敛速度LSTM-PPO算法快于PPO算法。
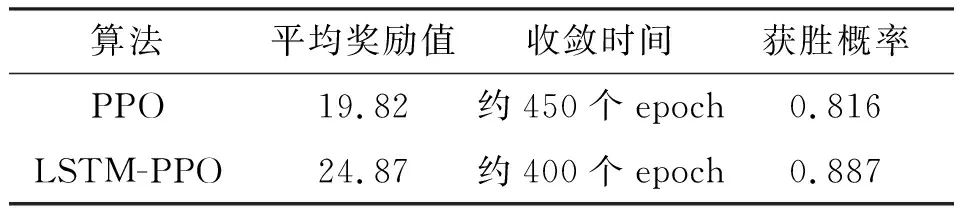
表2 实验1算法性能的对比
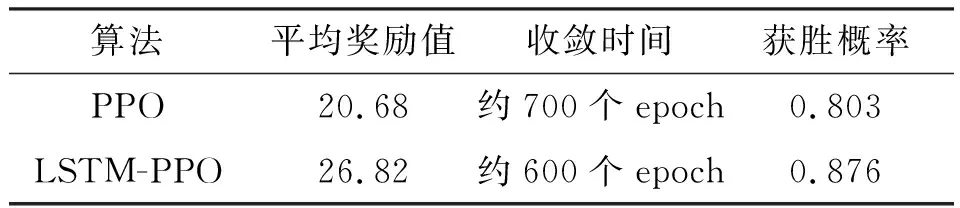
表3 实验2算法性能的对比
4 结语
由于空战环境复杂、格斗态势高速变化,因此本文针对UCAV与敌机一对一近距空战引入了基于LSTM-PPO算法的UCAV机动决策方法,设计了敌机采取随机机动策略、基于专家规则库的机动策略和基于优化算法的机动策略3组仿真实验。3组实验下的结果表明,不论敌机采取何种机动策略,UCAV均可以很好地感知空战态势,做出合理的机动动作,进而取得空战胜利。与PPO算法作性能对比也可以发现,基于LSTM-PPO算法的UCAV空战机动决策方法具有获得平均奖励值大、收敛速度快、获胜概率高的优点。
