动态导航技术中植入位点骨质量对种植精度的影响
2022-06-29伍颖颖
王 磊, 伍颖颖, 满 毅
(口腔疾病研究国家重点实验室,国家口腔疾病临床医学中心,四川大学华西口腔医院口腔种植科,四川 成都 610041)
种植义齿凭借其不损伤患者天然牙且能较好 地重建患者缺失牙列的独特优点, 近年来发展迅速。 而正确的种植体位置和轴向是种植义齿实现良好的美学效果及健康功能的前提。 不当的种植体位置往往会带来影响功能或美学效果的并发症,严重时甚至需要移除种植体[1-2]。 种植成功的关键因素包括在有限的骨量中合理摆放种植体,避开重要的解剖结构并获得良好的咬合力传递。 想要把握这些关键因素,首先需要进行详细的种植术前设计。 在文献报道中,锥形束CT(cone beam computed tomography,CBCT)在口腔领域中得到了广泛的应用[3-4],由于其具有很高的图像清晰度,以及可沿任一轴向进行阅片等优点,成为了种植术前的必要步骤[1,5-8]。 目前, 许多软件都已经能够实现在三维CT 成像中虚拟摆放修复体,之后按照理想的修复体位置来设计种植体的三维位置。 设计好理想的种植体三维位置后,通常可选用动态导航技术或者导板技术将术前设计转移到解剖术区[9-11]。
导板技术通过控制种植钻针的方向及深度来实现种植体的精准植入。 但是导板技术同样存在缺点:导板就位后会遮挡视线;影响冷却水入路,造成局部产热过多的情况[8,12-13]。 此外,导板技术对开口度的要求较高,部分患者在后牙区使用导板时不易安放钻针。 动态导航技术利用运动追踪技术实时定位种植手机和颌骨术区,并将三维位置实时传递至显示器上(图1)[1,7]。 术者通过查看显示器上的钻针位置和方向来调整钻针,最终达到实现术前设计的目的[1]。 动态导航技术具有良好的临床视觉,无论是术区的直接视野, 或者是显示器所显示的间接视野,均可使术者可以准确观察到钻针和患者颌骨影像的实时相对位置[14]。同时,导航技术对张口度没有额外要求[9]。

图1 动态导航设备的原理示意图Figure 1 Schematic diagram of the dynamic navigation device
此前已有研究报道了不同的骨密度会对导板技术的种植精度产生影响,并得出了低密度骨质容易产生更大种植偏差的结论[15-17]。 此外,Bishop 等[18]的研究也报道了当钻针与模型成10°和20°的角度预备时,容易出现钻针的滑动。 通过对以往文献的检索,发现目前还没有关于颌骨密度及颌骨形态是否会影响动态导航技术术后精度的相关研究。 本文目的是探究颌骨密度及颌骨形态对导航技术下种植精度的影响。
1 资料和方法
1.1 研究对象
本研究对2017—2021 年通过动态导航技术进行种植的患者进行回顾分析。 共纳入42 例患者,合计47 颗种植体, 包括40 颗上颌前牙区种植体、7 颗上颌前磨牙区种植体。 其中男性17 例、女性25 例,年龄为18~63 岁,平均年龄(33.49±11.08)岁。
纳入标准:①种植位点骨皮质完整;②年龄>18 周岁;③有足够的骨量进行种植手术。排除标准:①骨质疏松;②近期有双膦酸盐药物的服用史;③近期存在激素类药物服用史;④存在严重未控制的系统性疾病;⑤种植位点处曾行骨增量手术。
1.2 治疗流程
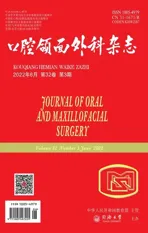
①术前使用聚醚印模材料将U 型管固定在缺牙区及周围牙列上, 患者佩戴U 型管拍摄CBCT(Morita 公司,日本),同时以DICOM 格式保存医学影像数据(图2A—D)。 牙列缺失的患者则需要在术区同颌的颌骨植入小型配准钉,术中利用配准钉来进行导航配准[14]。
②将获取的DICOM 数据导入导航种植设计软件口腔种植手术导航系统2.4(苏州迪凯尔医疗技术有限公司, 中国),首先进行轴向的重新切割,之后再构建全景片及标注神经管位置,随后选择虚拟的修复体和种植体,进行术前的虚拟设计[19](图2E)。
③连接导航仪器,进行标定及配准,调整手机轴向,保证手机上的识别元件可以被导航仪器识别到的同时不会与参考板互相遮挡;手机分别连接长短识别球钻与参考板进行标定,建立手机和参考板之间的坐标系(图2F);将U 型管再次复位到患者口内,检查固定装置的安放位置是否阻挡U 型管的取出;连接参考板和固定装置(图2G);将固定装置固定在患者同颌的对侧牙列,使用短识别球钻开始配准, 选择6 个以上的配准点之后进行误差分析,当配准误差<0.3 时表示配准的精度可以继续进行手术(图2I);配准完成后取下U 型管;选择特征性的解剖结构验证钻针识别位置是否准确(图2J)。
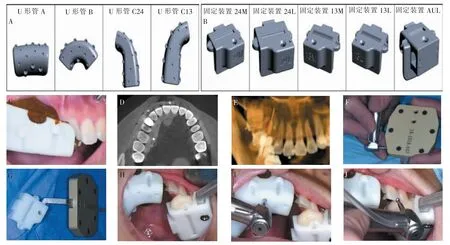
图2 导航手术术前的准备流程Figure 2 Preoperative preparation process of navigation surgery
④开始外科手术部分,手术操作均由同一名经验丰富的种植科医生完成。 所有患者均采用浸润麻醉,并进行翻瓣种植手术。
⑤术者通过显示器上显示的深度和轴向指示进行引导下的钻针预备及种植体的植入,此时助手需要辅助观察口内情况,遇到邻牙阻挡种植手机或其他意外情况时提醒术者进行调整(图3)。
⑥完成手术后,患者再次进行CBCT 检查,并获取DICOM 数据。
⑦将术前设计文件与术后CT 的DICOM 数据进行精度验证。 将术前设计文件导入精度验证软件digital-care(苏州迪凯尔公司,中国)中,并将术后DICOM 数据导入软件中,点选4 个特异性的解剖标志点,如牙尖、骨嵴等进行粗配准。 粗配准误差小于0.3 的情况下进行精配准, 圈选4 处骨面进行精配准。 精配准误差小于0.1 的情况下,点选种植体,进行术后的精度验证,记录精度验证的结果用于统计学分析。 所有数据均直接使用软件自行给出的精度验证结果,不进行任何手动调节。
1.3 种植精度验证和骨密度、形态测量
1.3.1 种植精度验证 将术前设计和术后DICOM文件导入精度验证软件 (种植术后精度验证系统2.4,苏州迪凯尔医疗技术有限公司,中国)中,在软件中匹配术前设计及术后影像,测量实际植入种植体和术前设计种植体颈部中心之间的线性偏差,记作种植体颈部偏差; 测量二者根尖位置的线性偏差,记作种植体根尖偏差;测量二者长轴之间的角度偏差,记作种植体轴向偏差[16-17]。 详见图4。

图4 术后精度验证的测量指标Figure 4 Measurements of the postoperative deviation analysis
1.3.2 骨密度测量 随后将DICOM 数据导入OsiriX lite 软件(Pixmeo SARL 公司,瑞士)中进行骨密度的测量[15,17]。 测量方法为框选种植体的所在区域,测量该区域的平均骨密度,单位为Hu,见图5A。
1.3.3 种植体颈部骨宽度测量 在导航设计软件中,将CT 截面旋转至正矢状面,测量种植体颈部位置的颌骨骨宽度[16-17],见图5B。
1.3.4 种植位点骨壁角度测量 同时测量CBCT 颊舌面上种植体长轴与植入位点骨壁所成的交角角度。 测量方法如下:旋转CT 至矢状面,确定种植体长轴为直线1(L1);选择种植体靠近骨壁斜坡一侧的侧边并进行延长(此例中为腭侧),延长此线为直线2(L2);L1 与骨壁的交点为A 点;L2 与骨壁的交点为B 点; 连接AB 两点形成直线L3,L3 与L1 所成的角α 即为测量指标, 角α 的取值范围为0°~90°。 详见图5C。
图5 CBCT 测量指标Figure 5 CBCT images showing measurement parameters
1.4 统计学分析
使用IBM SPSS 软件进行统计学分析。 对骨密度、种植体颈部骨宽度、斜坡骨壁和种植体长轴的交角等定量资料和种植偏差数据进行Spearman 相关分析及一元线性回归分析。设定P<0.05 为差异具有统计学意义。
2 结果
2.1 患者信息及种植体信息
本研究合计纳入42 例病例,其中包括17 例男性、25 例女性,患者年龄为18~63 岁,平均(33.49±11.08)岁。 所有牙位均为上颌前牙及上颌前磨牙。
在42 例纳入者中共植入47 颗种植体。 种植体直径为3.0~4.1 mm,长度为10.0~14.0 mm,所有种植体均为骨水平种植体。 详见表1。
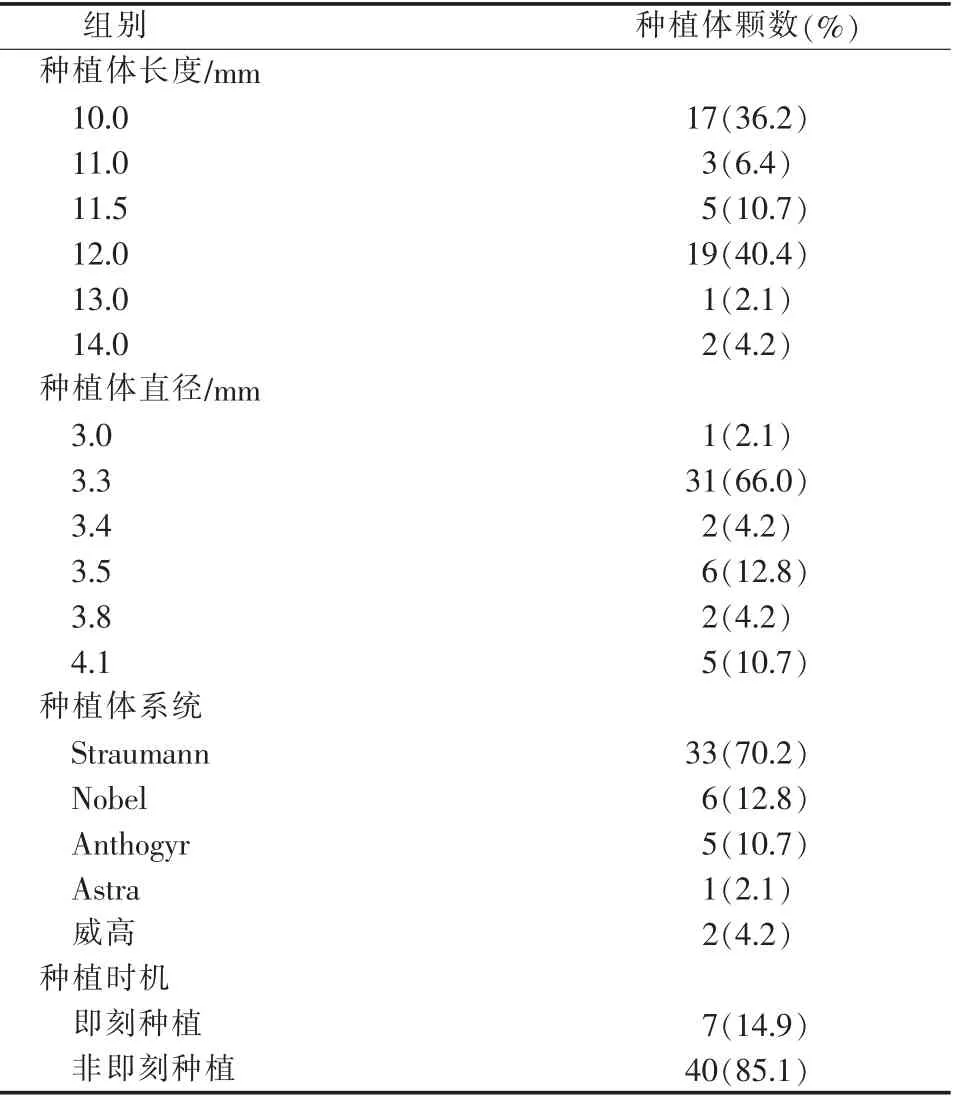
表1 种植体基本情况Table 1 Basic information of implants
2.2 种植偏差分析
术后精度验证的结果显示,平均种植体颈部偏差为(0.981±0.482) mm,95% CI(0.84, 1.12);种植体根尖偏差为(1.187±0.579)mm,95%CI(1.02,1.36);种植体轴向偏差为(3.420±2.002)°, 95% CI (2.83,4.00)。
2.3 相关指标的比较结果
骨壁角度与种植体偏差的相关分析结果显示,角度越小,种植体轴向偏差越大,差异具有统计学意义(r=-0.298,P<0.05);颌骨密度与种植体偏差的相关分析结果显示,颌骨密度越小,种植体轴向偏差越大,差异具有统计学意义(r=-0.289,P<0.05);颌骨宽度与种植体偏差的相关分析结果显示, 颌骨宽度和种植体偏差不具有相关关系(P>0.05)。 详见表2。

表2 相关分析结果Table 2 Correlation analysis results
2.4 一元线性回归分析
对骨壁角度及种植体轴向偏差进行一元线性回归分析,结果显示颌骨骨壁的角度与种植体轴向偏差成反比, 差异具有统计学意义 (b=-0.030,P<0.05)。 详见图6、表3。

表3 一元线性回归分析Table 3 Univariate linear regression analysis

图6 角度线性回归散点图Figure 6 Angle linear regression scatter plot
2.5 治疗结果
所有种植体良好,未发现种植体松动、术后感染、解剖结构损伤等情况。 仅观察到轻微的疼痛和肿胀。术中、术后均无严重并发症发生。所有患者对手术效果均表示满意。 影像学复查结果显示种植体周无明显骨吸收。
3 讨论
本研究的目的是探究骨密度与颌骨形态是否会影响导航下的种植精度。结果提示,骨密度越小,种植体轴向偏差越大,差异具有统计学意义(r=-0.289,P<0.05);角度越小,种植体轴向偏差越大,差异具有统计学意义(r=-0.298,P<0.05)。 分析原因发现,由于斜坡型骨壁颊舌两侧的阻力不一,钻针预备时存在滑向阻力较小一侧的趋势, 在即刻种植病例中,这一趋势在拔牙窝腭侧的骨斜坡上进行种植窝洞预备时体现得更为明显。 这提示我们在种植设计时,遇到植入点与骨壁角度较小的情况下需要警惕钻针的滑动,手术时需要注意使用具有侧向切割功能的钻针先平整骨壁,完成定点后再进行种植窝洞预备,此时由于钻针进入骨内,颊舌侧受力均匀,则不会产生相应的滑动。
根据本研究所进行的相关分析结果,在低骨密度的病例中,钻针所受到的阻力比高骨密度的病例中低,钻针沿斜坡出现的滑动趋势更加明显,这也与多项关于导板种植精度和骨密度的研究结果相符合,即种植术区骨密度降低将带来相对较大的种植偏差。 Bishop 等[18]的研究报道了钻针与模型成角度预备时出现的误差更大,这与本研究的结果较为符合。 而在骨密度低的种植位点中,这种钻针的滑动可能更加明显,这与多篇研究所报道的低密度骨质会增大导板种植偏差的结果相符合[15-17]。
此外,本研究同样进行了种植体颈部骨宽度与导航下的种植精度研究,结果提示种植体颈部骨宽度和导航下的种植精度不具有相关关系。 这一结果与此前Putra 等[16]的结论相符, 即种植体颈部骨宽度对于导航下的种植精度无明显影响。
Aydemir 等[9]进行了一项对照研究,患者双侧均需行种植治疗, 随机选择一侧进行自由手种植,另一侧使用导航技术种植,最终结果显示,与自由手种植相比, 动态导航技术可以减小约0.7 mm 的线性偏差和5°的角度偏差,最终导航的精度为颈部偏差(0.72±0.26) mm、根尖偏差(0.69±0.36) mm、角度偏差 (5.33±1.63)°。 这与本研究所得结果较为接近。 1 篇meta 分析总结了10 篇关于动态导航技术的临床试验, 统计出在1 298 颗导航下种植的偏差数据, 结果显示, 种植体颈部平台位置线性偏差为1.02 mm,95% CI(0.83, 1.21);种植体根尖位置线性偏差为1.33 mm,95% CI(0.98, 1.67);种植体轴向角度偏差为3.59°,95% CI(2.09, 5.09)[8],这也与本研究得出的结果较为符合。
在前牙区常会遇到种植窝洞定点处为斜坡型骨壁的病例, 即刻种植中更加无法避免这一问题。为了避免牙位不同及剩余骨量差异对研究结果的影响,本研究均纳入上颌前牙及前磨牙,除即刻种植病例需要植骨填充拔牙窝洞外,其余种植位点剩余骨量均能保证在不植骨的情况下完成种植体的植入。 从结果来看,低骨密度、小角度会增大种植体的轴向偏差,差异具有统计学意义。且据多项报道显示,导板手术中也会遇到此类问题,即使是应用数字化技术进行种植,误差也难以避免[9,15-16]。 种植医生需要警惕解剖因素可能会带来的误差,并采取相应措施加以预防。 例如,在种植窝洞定点时先采用球钻、侧切钻、牙槽嵴顶修整钻等钻针突破骨皮质,预备深度约1.0~1.5 mm,具体深度根据种植体深埋骨下的距离进行调整,尽量不超过种植体颈部平台。 当球钻突破骨皮质后再进行扩孔钻的逐级预备。 在平整的牙槽嵴上预备窝洞,可在一定程度上改善由于骨斜坡造成的钻针偏斜。 此外,在低密度的病例中,可以尝试将实时导航显示的错误碰撞范围减小,严格沿设计方向进行预备,以此减小出现钻针偏斜的可能。
与本研究不同的是,其他学者提出,高密度的骨阻力或使用长种植体也可能造成误差的增加[8]。Somogyi 等[20]在关于导航下种植精度的研究结果中发现了导航也具有高达11.94°的角度偏差;Aydemir等[9]报告的线性误差也高达4.55 mm,角度偏差高达10.18°,这些提示导航技术依旧存在误差。动态导航技术为一个系统性的流程, 其中包括多个环节:术前CBCT 的拍摄、虚拟设计、标定、配准、医生经验等,每个环节都可能会造成一定的误差。 无论在哪个环节产生误差都将会影响导航种植的精度[20-21]。也有学者进行了关于导航技术学习曲线的研究,初学者在进行了数次模型上的导航操作过程后,统计了5 次种植后的数据,发现在第5 次时可达到学习曲线的平台区。 由此建议,对于导航的学习需要至少在模型上操作5 次以此达到初步掌握[1,5]。 为尽量减少由于医生经验所带来的误差,本研究均由同一名资深的种植科医生进行操作。
综上所述,导航技术具有较高的精度,能够将术前的虚拟计划较好地转移到真实术区。 根据本研究的结果,动态导航技术中,种植钻针方向和植入位点骨壁越接近平行,种植体出现角度偏差的可能性越大,这可能与植入位点的骨斜坡造成的钻针滑动有关,将来需要更大的样本量来分析这一问题。