论瓜豆模型解题方法研究
2022-04-25陈琴
陈琴

[摘 要] 最值问题是初中数学研究的热点之一,涵盖知识点广,形式多样,解题灵活,综合性强,是学生的一个难点. 研究者结合目前学生学情和考试需要,综合平时做题经验和资料的查询,得到了最值问题中找运动轨迹问题“瓜豆模型”的解决办法,主要解决了从动点运动轨迹与主动点运动轨迹的关系,以及如何找到从动点的运动轨迹等问题.
[关键词] 瓜豆模型;最值问题;解题方法
瓜豆模型,就是通过找规律,把这一类问题抽象、简化成一种具有代表性的基本图形. 瓜豆模型的好处在于多一种解题思路,解题时形成条件反射,看到这个基本图形就联想到解题策略. 瓜豆模型对解题者的思维要求较高. 文章将提出解决瓜豆问题的思路和方法,不过不同的问题基本上有不同的解题技巧,而要运用这些方法、技巧,要求解题者具有较强的洞察力和数学机智,并能灵活运用各种方法.
文章将讨论一类动点的运动轨迹问题. 对于此类试题,一般先描述动点P,但最终问题却是求另一个动点Q,当然,P,Q之间存在某种联系. 解题的常规思路为:从P点出发探讨Q点的运动轨迹. 其中动点轨迹的基本类型为圆或圆弧型、线段或直线型. 为了便于区分动点P,Q,可称点P为“主动点”,点Q为“从动点”. 古人云:种瓜得瓜,种豆得豆. 对于瓜豆问题,“种”圆得圆,“种”线得线,“种”的是哪种运动轨迹,得到的就是哪种运动轨迹,这就是“瓜豆模型”.
知识储备
1. 两点确定一条直线.
2. 圆的定义.
3. 旋转的定义、旋转三要素、旋转的性质.
4. 掌握中位线、手拉手全等、“A”型相似、手拉手相似、位似等知识.
模型條件
1. 两动点有主、从关系,有一定点.
2. 从动点与主动点到定点的距离之比为定值.
3. 从动点与主动点到定点连线的夹角等于定值.
模型结论
从动点与主动点的运动轨迹一样.
模型
(一)模型1:动点的运动轨迹为直线或线段
1. 两动点与定点在同一条直线上
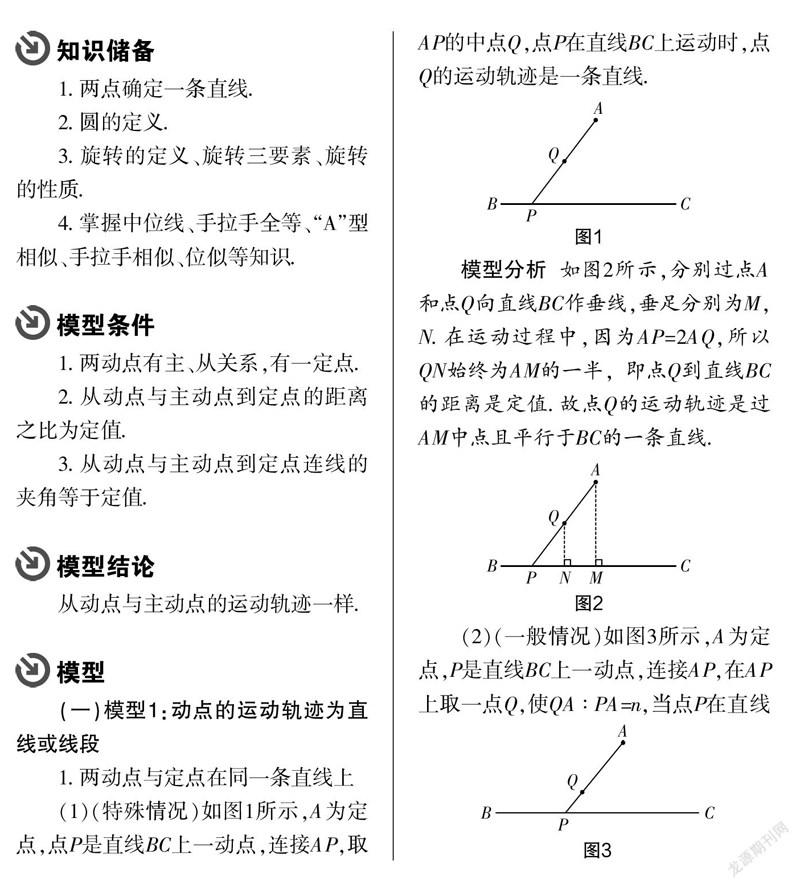
(1)(特殊情况)如图1所示,A为定点,点P是直线BC上一动点,连接AP,取AP的中点Q,点P在直线BC上运动时,点Q的运动轨迹是一条直线.
图2所示,分别过点A和点Q向直线BC作垂线,垂足分别为M,N. 在运动过程中,因为AP=2AQ,所以QN始终为AM的一半,即点Q到直线BC的距离是定值. 故点Q的运动轨迹是过AM中点且平行于BC的一条直线.
(2)(一般情况)如图3所示,A为定点,P是直线BC上一动点,连接AP,在AP上取一点Q,使QA ∶ PA=n,当点P在直线BC上运动时,点Q的运动轨迹是一条直线.
模型分析 如图4所示,分别过点A和点Q向BC作垂线,垂足分别为M,N. 在运动过程中,由QA ∶ PA=n,得QN=(1-n)AM,即点Q到直线BC的距离是定值. 故点Q的运动轨迹是过AM上一点Q,满足QN=(1-n)AM且平行于BC的一条直线.
模型结论 ①从动点运动轨迹直线的确定:过定点A作定线BC的垂线,垂足为M,在垂线段AM上取一点Q,使得QM=(1-n)AM,过点Q 作定线BC的平行线,则此直线为从动点的运动轨迹. ②若点P的运动轨迹为线段P1P2,可以直接取线段P1P2的两个端点得到对应的Q的位置Q1,Q2,则点Q的运动轨迹为线段Q1Q2,且Q1Q2 ∶ P1P2=n,Q1Q2∥P1P2 .
2. 两动点与定点不在同一条直线上
(1)(特殊情况)如图5所示,A为定点,∠PAQ=90°且AP=AQ,当点P在直线BC上运动时,点Q的运动轨迹是一条直线.
模型分析 如图6所示,在直线BC上任取两点P1,P2,连接AP1,AP2,朝同一方向绕着点A同时旋转AP1,AP2,得到AQ1,AQ2,且旋转角为90°,作直线Q1Q2. 由手拉手全等模型可得P1P2=Q1Q2,且Q1Q2⊥BC. 因为P1,P2是任取的,所以当点P在直线BC上运动时,点Q在直线Q1Q2上运动. 所以点Q的运动轨迹是一条直线,且该直线与BC垂直.
(2) (一般情况)如图7所示,A为定点,∠PAQ为定角α且AQ ∶ AP=n(定值),当点P在直线BC上运动时,点Q的运动轨迹是一条直线.
模型分析 如图8所示,在直线BC上任取两点P1,P2,连接AP1,AP2,朝同一方向绕着点A同时旋转AP1,AP2,旋转角为α,再缩放得到P1,P2两点的对应点Q1,Q2,使AQ1 ∶ AP1=n,AQ2 ∶ AP2=n. 作直线Q1Q2. 由手拉手相似模型可得Q1Q2 ∶ P1P2=n,且直线Q1Q2与直线BC的夹角为定角α.因为P1,P2是任取的,所以当点P在直线BC上运动时,点Q在直线Q1Q2上运动. 所以点Q的运动轨迹为一条直线,且这条直线与直线BC的夹角为定角α.
模型结论 ①找点Q的方法:在直线BC上取一点P(此时找特殊点),旋转对象为主动点P,旋转中心为定点A,旋转方向为主动点绕着定点旋转到从动点方向,旋转角为定角,再缩放得到AQ,使得AQ ∶ AP=n. ②直线Q1Q2与直线BC的夹角为定角α. ③若点P的运动轨迹为线段P1P2,可以直接取线段P1P2的两个端点,得到对应的两个点Q的位置Q1,Q2,则点Q的运动轨迹为线段Q1Q2,且Q1Q2 ∶ P1P2=n. ④添辅助线的方法:旋转与缩放. ⑤说明:为了方便,旋转角有两个,我们统一选择小的那个旋转角,从主动点到从动点有两个方向,我们统一选择小的旋转角方向;这里,旋转与缩放的顺序可以调换.
(二)模型二:动点运动轨迹为圆或圆弧
1. 两动点与定点在同一条直线上
(1)(特殊情况)如图9所示,P是☉O上一个动点,A为定点,连接AP,Q为AP的中点. 当点P在☉O上运动时,点Q的运动轨迹是一个圆.
模型分析 如图10所示,连接AO,取AO的中点M,又点Q为AP的中点,所以MQ=OP. 因为OP是定值,所以QM是定值. 所以点Q的运动轨迹是以点M为圆心、OP的长为半径的圆. 点Q的运动轨迹相当于是点P的运动轨迹成比例缩放.
(2)(一般情况)如图11所示,P是☉O上一个动点,A为定点,连接AP,在AP上取一点Q,使得QA ∶ PA=n. 当点P在☉O上运动时,点Q的运动轨迹是一个圆.
模型分析 如图12所示,连接AO,在AO上取点M,使得MA ∶ OA=n. 因为QA ∶ PA=n,所以QM ∶ PO=n. 因为PO是定值,所以QM是定值. 所以点Q的运动轨迹是以M为圆心、n·PO的长为半径的圆. 点Q的运动轨迹相当于是点P的运动轨迹成比例缩放.
模型结论 ①如何找从动点运动轨迹的圆心和半径?圆心:连接定点A与圆心O,在AO上取一点M,使得MA ∶ OA=n,点M即为圆心. 半径:MQ=nOP. ②若点P的运动轨迹为圆(圆弧),则点Q的运动轨迹也为圆(圆弧). 若运动轨迹为圆弧,则两弧长满足:lQ ∶ lP=n. ③点Q的运动轨迹相当于是点P的运动轨迹成比例缩放.
2. 两动点与定点不在同一条直线上
(1)(特殊情况)如图13所示,P是☉O上一个动点,A为定点,连接AP,作AQ⊥AP且AQ=AP,则当点P在☉O上运动时,点Q的运动轨迹是一个圆.
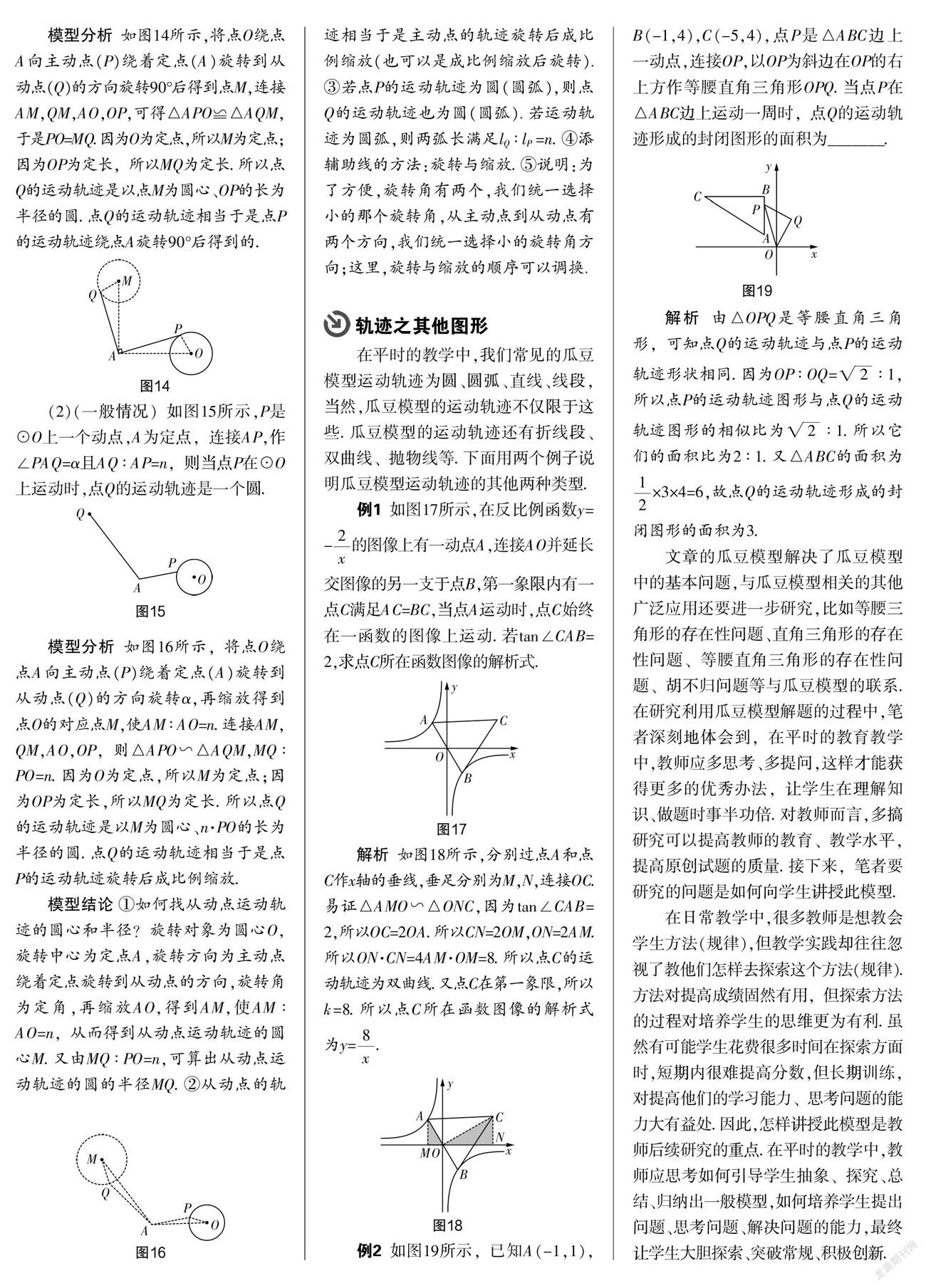
模型分析 如图14所示,将点O绕点A向主动点(P)绕着定点(A)旋转到从动点(Q)的方向旋转90°后得到点M,连接AM,QM,AO,OP,可得△APO≌△AQM,于是PO=MQ. 因為O为定点,所以M为定点;因为OP为定长,所以MQ为定长. 所以点Q的运动轨迹是以点M为圆心、OP的长为半径的圆. 点Q的运动轨迹相当于是点P的运动轨迹绕点A旋转90°后得到的.
(2)(一般情况)如图15所示,P是☉O上一个动点,A为定点,连接AP,作∠PAQ=α且AQ ∶ AP=n,则当点P在☉O上运动时,点Q的运动轨迹是一个圆.
模型分析 如图16所示,将点O绕点A向主动点(P)绕着定点(A)旋转到从动点(Q)的方向旋转α,再缩放得到点O的对应点M,使AM ∶ AO=n. 连接AM,QM,AO,OP,则△APO∽△AQM,MQ ∶ PO=n. 因为O为定点,所以M为定点;因为OP为定长,所以MQ为定长. 所以点Q的运动轨迹是以M为圆心、n·PO的长为半径的圆. 点Q的运动轨迹相当于是点P的运动轨迹旋转后成比例缩放.
模型结论 ①如何找从动点运动轨迹的圆心和半径?旋转对象为圆心O,旋转中心为定点A,旋转方向为主动点绕着定点旋转到从动点的方向,旋转角为定角,再缩放AO,得到AM,使AM ∶ AO=n,从而得到从动点运动轨迹的圆心M. 又由MQ ∶ PO=n,可算出从动点运动轨迹的圆的半径MQ. ②从动点的轨迹相当于是主动点的轨迹旋转后成比例缩放(也可以是成比例缩放后旋转). ③若点P的运动轨迹为圆(圆弧),则点Q的运动轨迹也为圆(圆弧). 若运动轨迹为圆弧,则两弧长满足lQ ∶ lP =n. ④添辅助线的方法:旋转与缩放. ⑤说明:为了方便,旋转角有两个,我们统一选择小的那个旋转角,从主动点到从动点有两个方向,我们统一选择小的旋转角方向;这里,旋转与缩放的顺序可以调换.
轨迹之其他图形
在平时的教学中,我们常见的瓜豆模型运动轨迹为圆、圆弧、直线、线段,当然,瓜豆模型的运动轨迹不仅限于这些. 瓜豆模型的运动轨迹还有折线段、双曲线、抛物线等. 下面用两个例子说明瓜豆模型运动轨迹的其他两种类型.
例1 如图17所示,在反比例函数y= -的图像上有一动点A,连接AO并延长交图像的另一支于点B,第一象限内有一点C满足AC=BC,当点A运动时,点C始终在一函数的图像上运动. 若tan∠CAB=2,求点C所在函数图像的解析式.
解析 如图18所示,分别过点A和点C作x轴的垂线,垂足分别为M,N,连接OC. 易证△AMO∽△ONC,因为tan∠CAB=2,所以OC=2OA. 所以CN=2OM,ON=2AM. 所以ON·CN=4AM·OM=8. 所以点C的运动轨迹为双曲线. 又点C在第一象限,所以k=8. 所以点C所在函数图像的解析式为y=.
例2 如图19所示,已知A(-1,1),B(-1,4),C(-5,4),点P是△ABC边上一动点,连接OP,以OP为斜边在OP的右上方作等腰直角三角形OPQ. 当点P在△ABC边上运动一周时,点Q的运动轨迹形成的封闭图形的面积为_______.
解析 由△OPQ是等腰直角三角形,可知点Q的运动轨迹与点P的运动轨迹形状相同. 因为OP ∶ OQ= ∶ 1,所以点P的运动轨迹图形与点Q的运动轨迹图形的相似比为 ∶ 1. 所以它们的面积比为2 ∶ 1. 又△ABC的面积为×3×4=6,故点Q的运动轨迹形成的封闭图形的面积为3.
文章的瓜豆模型解决了瓜豆模型中的基本问题,与瓜豆模型相关的其他广泛应用还要进一步研究,比如等腰三角形的存在性问题、直角三角形的存在性问题、等腰直角三角形的存在性问题、胡不归问题等与瓜豆模型的联系. 在研究利用瓜豆模型解题的过程中,笔者深刻地体会到,在平时的教育教学中,教师应多思考、多提问,这样才能获得更多的优秀办法,让学生在理解知识、做题时事半功倍. 对教师而言,多搞研究可以提高教师的教育、教学水平,提高原创试题的质量. 接下来,笔者要研究的问题是如何向学生讲授此模型.
在日常教学中,很多教师是想教会学生方法(规律),但教学实践却往往忽视了教他们怎样去探索这个方法(规律). 方法对提高成绩固然有用,但探索方法的过程对培养学生的思维更为有利. 虽然有可能学生花费很多时间在探索方面时,短期内很难提高分数,但长期训练,对提高他们的学习能力、思考问题的能力大有益处. 因此,怎样讲授此模型是教师后续研究的重点. 在平时的教学中,教师应思考如何引导学生抽象、探究、总结、归纳出一般模型,如何培养学生提出问题、思考问题、解决问题的能力,最终让学生大胆探索、突破常规、积极创新.