基于PDC-PMSM的双螺杆泵系统刚度及模态分析*
2022-02-28戴思锐冯桂宏张炳义
戴思锐,厉 伟,冯桂宏,张炳义
(沈阳工业大学 电气工程学院,辽宁 沈阳 110870)
0 引 言
双螺杆泵具有排量大、低紊流、振动噪音低等特点,因而被广泛应用于高、中、低压力流体输送机械中,用于输送不同黏性度的介质[1,2]。
双螺杆泵结构包括主动轴与从动轴,由异步电机驱动主动轴,通过同步机械齿轮带动从动轴反向旋转;两个螺杆之间留有空隙,衬套的内圆和螺杆的外圆二者之间的空隙也保持恒定。异步机与双螺杆泵之间由各自的机壳密封,之后再统一密封到一个系统。机械齿轮的存在会产生一系列问题,如维护成本比较高、振动噪声大、润滑油存在渗漏污染、易腐蚀等[3,4]。
核燃料的运输需要在高速、高压的环境下,并且其对于密封、泄漏要求比较严格。采用同步齿轮所能达到的效果并不理想;并且其主动轴伸出机壳外,也会在运动过程中随着螺杆运动而使核燃料泄漏。
为解决上述问题,需要从传统的传动结构出发,将同步齿轮取消。若取消传动齿轮,则在驱动过程中两个螺杆需要两台电动机驱动,但是双螺杆之间是并行放置,中间间距非常小,驱动电机则在尺寸上受到了限制,需要制造成细长结构、小直径的电机。张炳义等人[5]研究了细长电机的振动问题,但细长电机生产制造困难,在较高转速运行时,还存在着机械强度等问题。除此之外,两台电机必然需要进行单独的密封,之后再与螺杆泵统一密封,这从根本上增加了密封的难度,所以直接取消同步齿轮,改用两台电机驱动的方案并不可取。
其次,在工业应用中,经常采用磁力齿轮取代机械齿轮。磁力齿轮利用异性相吸特性,将充磁方向相反的永磁体分别安装在两个转子相邻位置,形成耦合磁场,实现磁力齿轮扭矩传递作用,具有无油污、无摩擦、隔振等优点[6,7],有取代传统机械齿轮的发展趋势。但是,磁力齿轮也有本身的缺陷,在传递同步转矩时,主动轮和从动轮存在矩角特性问题,高精度的同步旋转不能得到保障;并且现阶段的热点主要也集中在高精度模型建立及机械磁路结构的优化问题[8]。所以只简单地用磁力齿轮替代机械齿轮一样不可取。
并行直驱连体永磁电机(PDC-PMSM)可与双螺杆的泵阴、阳螺杆直接相连,省去中间传统的传动环节,实现双螺杆泵无齿轮同步传动。采用PDC-PMSM与双螺杆泵组成一个集成系统,可以解决动密封问题,保证负载并行两轴同步性,系统整体效率可以得到大幅度提升。
杨超君等人[9]在进行螺杆转子设计时,研究了尺寸公差、强度等因素对螺杆转子的影响下,同时还评估了螺杆工作时的动态特性,特别在一些流体负载通过时,可能会造成强烈的共振,对螺杆工作性能造成影响;但文献里有关转子设计的优化目标是提高磁力齿轮传递的扭矩,并不是分析系统模态及形变量问题。YIN X等人[10]进行了对形变引起间隙变化的模态分析,主要分析了形变对容积效率的影响;但该研究仅针对螺杆进行了分析,没有对电机与螺杆泵系统进行研究。高进等人[11]研究了燃气轮机转子的振动模态,在该研究中,将抗扭刚度模化为接触转子轮盘间的一个抗扭弹簧,主要分析拉杆转子在不同预紧力下的扭振模态频率;但其负载端为燃气轮机,并非双螺杆泵。贺岩松等人[12]研究了爪极发电机的定子共振引起的振动噪声问题,分析了定子铁芯以及定子系统的各阶模态分析与固有频率;但是该研究中考虑的负载端并非双螺杆泵。张博一等人[13]研究了汽轮发电机组采用弹簧隔断的振动特性,但没有研究电机转子与双螺杆系统的固有特性分析。
笔者以一台2.2 kW的PDC-PMSM为研究对象,对PDC-PMSM双螺杆泵系统的刚性进行解析计算,得到总形变量,并采用有限元方法进行验证;同时笔者利用有限元方法对双螺杆以及PDC-PMSM双螺杆泵系统的各阶模态和临界转速进行分析,并在不同约束条件下得到其固有频率和振型,满足PDC-PMSM双螺杆泵系统的设计需要。
1 PDC-PMSM运行机理
笔者提出的PDC-PMSM为2个圆柱形定子各切割掉部分定子铁芯后,形成2个完全相同的结构,将2个定子并列放置连接在一起,上、下两部分采用相同材料填充并焊接平整,构成照中心线镜像对称的连体式定子;双转子与PDC-PMSM定子铁芯内部的空腔同心。
PDC-PMSM结构图如图1所示。
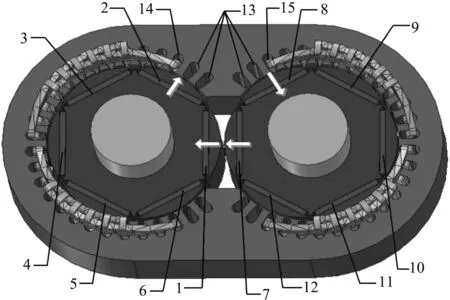
图1 PDC-PMSM结构图1—永磁体P1;2—永磁体P2;3—永磁体P3;4—永磁体P4;5—永磁体P5;6—永磁体P6;7—永磁体P7;8—永磁体P8;9—永磁体P9;10—永磁体P10;11—永磁体P11;12—永磁体P12;13—虚槽0;14—左侧定子槽;15—右侧定子槽
由图1可见:定子铁心内部两个空腔形成近似“∞”型结构,其横截面外轮廓的两端为圆弧形,上、下两端面为平面形;左、右两侧定子槽数Z相等,均匀分布在连体式定子铁心空腔内壁上,槽内嵌有相同绕组结构形式的两套三相绕组,同时通以三相电流,每个槽内电流流向相同(为了保证电机磁路完整度,添加若干虚槽0,虚槽中不嵌放绕组);
双转子均有p对磁极,同一转子上相邻永磁体间N、S极性交替分布,左、右两个转子镜像对称位置永磁体极性相反,即N极对S极,S极对N极(如白箭头所示)。
综上所述,PDC-PMSM连体式定子在相同序号槽中的绕组电流方向一致,位于双转子镜像对称处的永磁体P2与永磁体P8极性相反,这就会形成一对反向旋转的磁场,在这对磁场的作用下,两转子之间相互对转。电机中间区域依据磁力齿轮原理两转子总是相互吸引的,可以更好地保持同步。电机在稳定状态时,永磁体P1与永磁体P7总是完全相对,这是由于磁极间特性所决定的。
2 PDC-PMSM设计方法
2.1 PDC-PMSM定子切割原则
对于整数槽绕组,通常每极每相槽数q如下:
(1)
式中:m—相数;Q—定子槽数;p—极对数。
定义定子槽数Q与极对数P之间存在着一个最大公约数gcd(Q,p)。引用定子分块原则[14],在满足电机对称的情况下,一定会有2pn个磁极下每相占有Qn/m个槽(Qn为组成一个单元电机所需要最少的槽数,pn是组成一个单位电机所需的最小极对数)。
电机齿槽分布、磁动势向量图、电量向量图都是以2pn个磁极为一个周期,而一共形成gcd(Q,p)个周期,如下所示:
(2)
为了尽可能少地切割定子,必须在电机中引出尽可能多的并联支路数,而gcd(Q,p)为PDC-PMSM引出最多的并联支路数;同时,还需保证PDC-PMSM在切割后依然存在2p个磁极,因此PDC-PMSM定子切割原则为:
即在保证电机尽可能多条支路的情况下,切割掉一条支路,同时还应保证剩余支路包含成对的永磁体。
除此之外,针对二极电机,定子无法进行切割,不能设计为PDC-PMSM。针对四极电机,定子虽可以按照切割原则进行切割,但需切割掉定子的一半(过于浪费,无实际意义)。故PDC-PMSM适用于六极以及以上电机。
2.2 PDC-PMSM绕组分布
PDC-PMSM双转子是同步反向旋转的,这是由于在双转子内部形成的磁场为反向旋转磁场。而反向旋转磁场形成的条件是连体定子左、右相同序号定子槽中的绕组电流方向一致,同时镜像对称位置的永磁体充磁方向相反。
在连体式定子的边缘,为了保证磁路与普通永磁电机一致,需要尽可能多地设计虚槽。此处定义虚槽与定子槽型一致,但槽中不放绕组,不通电流,这样虚槽不影响绕组分布,电机依然可以稳定运行。
PDC-PMSM磁力线走向示意图如图2所示。
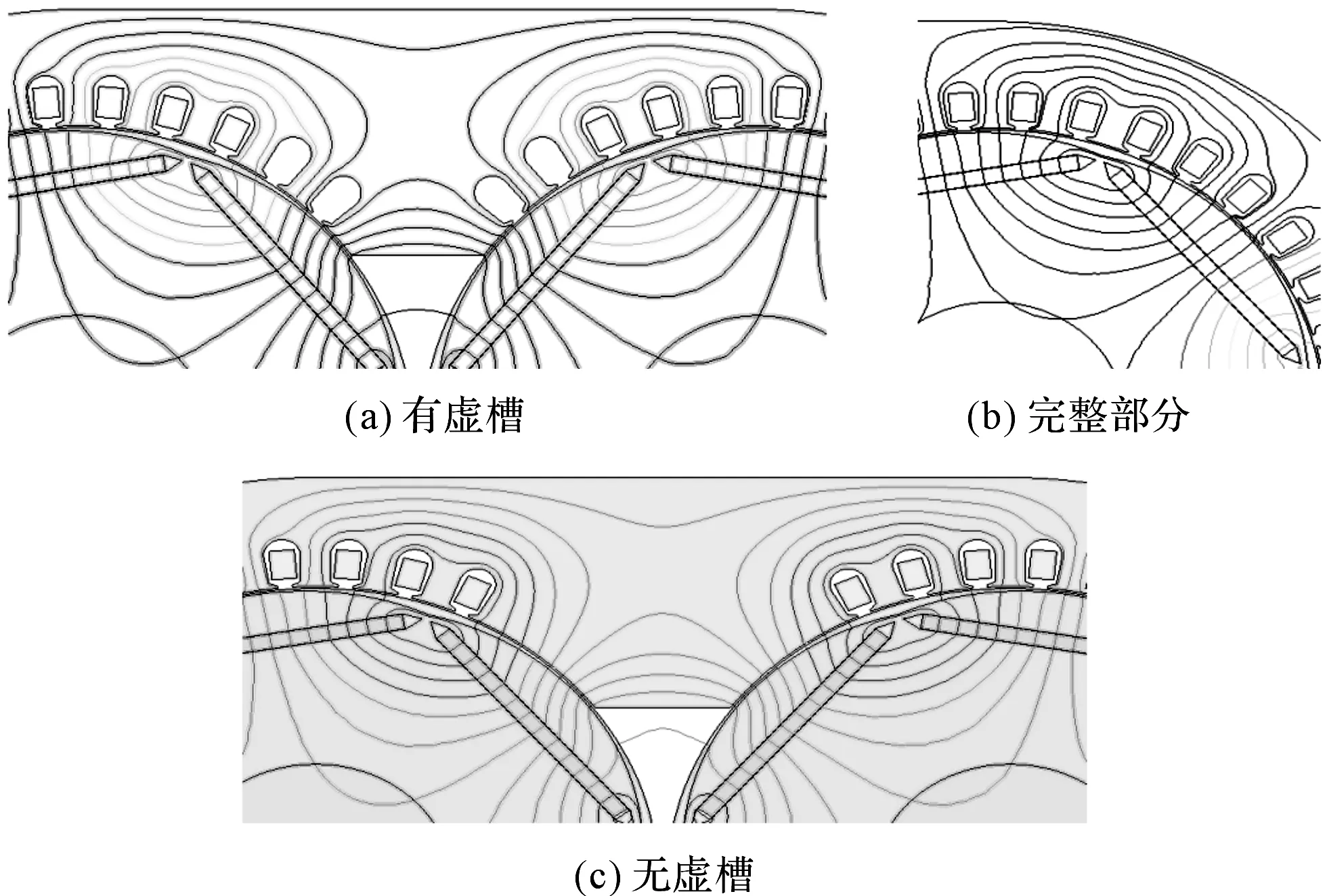
图2 PDC-PMSM磁力线走向示意图
由图2可见:电机增加虚槽后,切割部分的磁力线走向与完整部分的磁力线更接近。因此,在满足电机性能以及强度的基础上,应尽可能多地开虚槽,更能保证电机切割部分磁路与完整部分一致;
PDC-PMSM没有开虚槽时,磁力线会走磁阻最小部分,会与完整部分的磁路不一致。因此,应尽可能多地开电机虚槽,这样对提高PDC-PMSM的性能有帮助。
2.3 PDC-PMSM设计原理

因此,在PDC-PMSM设计中,需要满足恒转矩调速原理,以保证电机可以按照设计要求稳定运行。
2.4 驱动方式对比
“异步电机+同步齿轮”是双螺杆泵原有的驱动方式。此处采用笔者提出的PDC-PMSM直接驱动双螺杆泵,以替代原有驱动方式。
笔者针对两种驱动方式进行宏观对比。当异步电机工作时,转子绕组在发热中消耗掉从电网吸收的电能励磁,这部分损耗约占电机总损耗的20%~30%,这使异步电机效率降低。转子励磁电流在定子绕组中为感性电流,使进入定子的电流落后于电网电压一个角度,这造成了异步电机功率因数降低。而对于永磁电机来说,转子上镶嵌永磁体,由永磁体产生转子磁场,在电机旋转工作时与定子磁场同步运行,转子中不产生感应电流,不存在转子电阻损耗,这一点就大大提高了电机的效率。
由于在永磁电机转子中无感应电流励磁,导致定子绕组呈纯阻性负载,使电机功率因数几乎为1。
3 PDC-PMSM双螺杆泵系统刚性分析
笔者设计一台功率为2.2 kw,转速为4 500 r/min的PDC-PMSM。
样机主要参数如表1所示。

笔者对电机进行有限元仿真,以验证设计的合理性。PDC-PMSM特殊结构,左、右两部分并联联接,分别将各相电源并股,最终引出三相电源进行通电。
PDC-PMSM空载反电动势如图3所示。
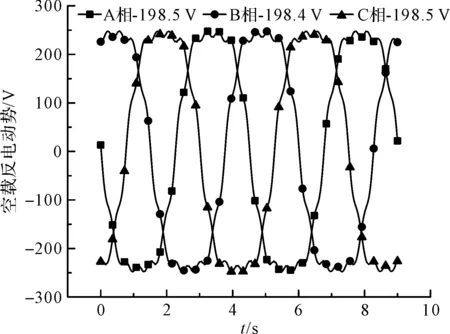
图3 PDC-PMSM空载反电动势
笔者对PDC-PMSM进行负载仿真,主要观测正弦电流激励下电机的转矩值。
PDC-PMDM电磁转矩如图4所示。
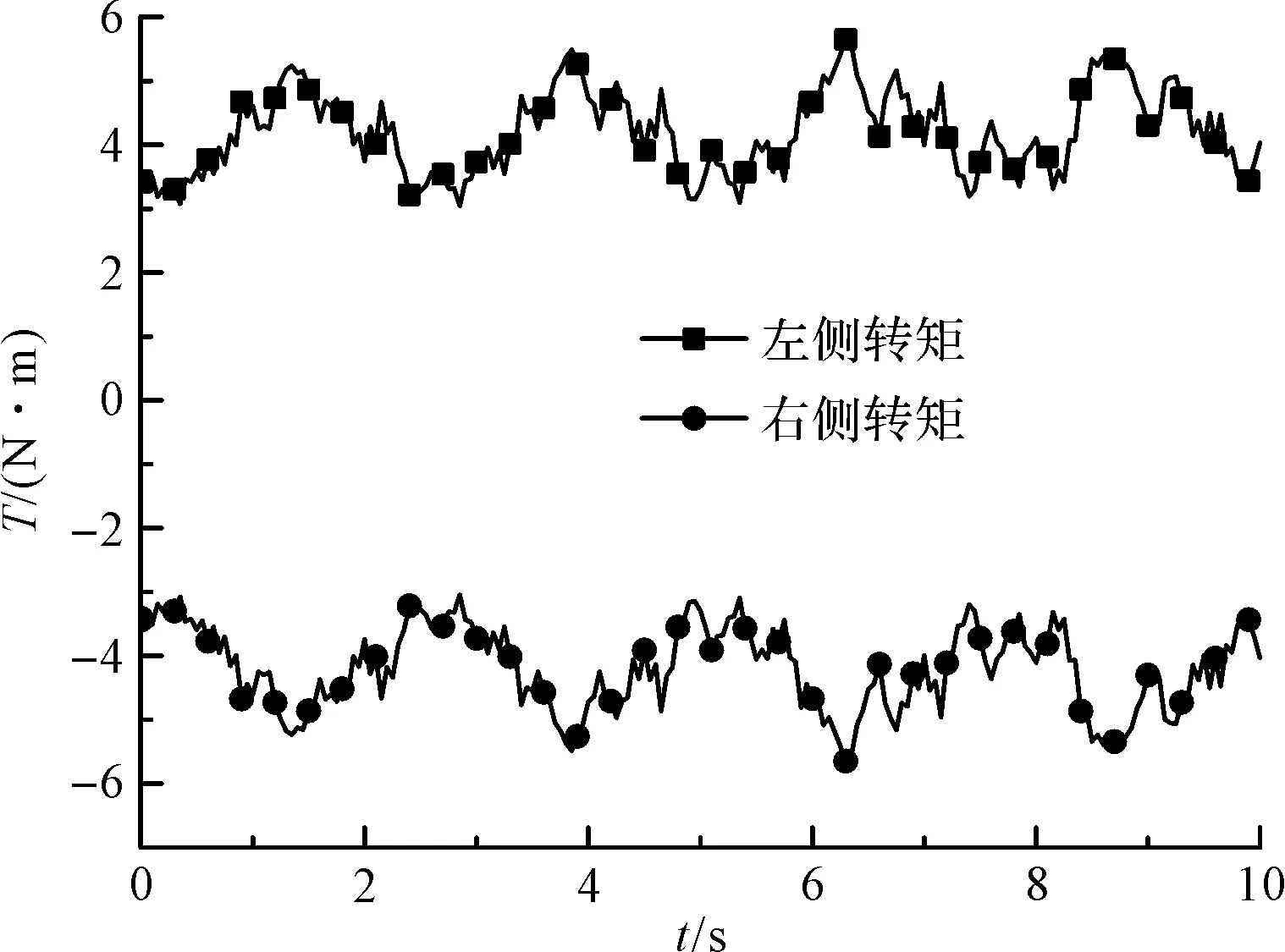
图4 PDC-PMSM电磁转矩
由图4可见,左、右两部分电机转矩对称,波动较小,PDC-PMSM稳定运行。
双螺杆泵系统在旋转时,极易发生螺杆间碰撞,从而导致螺杆变形,泵体损坏。由于双螺杆两个螺杆之间受力相同,在PDC-PMSM直驱双螺杆泵时,增加了电机部分,导致整个系统形变量会产生变化,故此处笔者对于PDC-PMSM螺杆系统其中一个螺杆进行刚性分析。
螺杆部分材料为40Cr,密度为7 850 kg/m3,电机部分硅钢片的密度为7 700 kg/m3,磁钢密度为7 700 kg/m3,由软件自动算出轴的重力G轴=148.862 N,螺纹部分的重力G螺=131.712 N,电机部分重力G电=31.556 N。
笔者去除螺纹部分,不考虑圆角与倒角,将整个螺杆简化为光轴处理。
PDC-PMSM双螺杆泵简化图如图5所示。
图5 PDC-PMSM双螺杆泵简化图
PDC-PMSM双螺杆泵受力图如图6所示。
图6 PDC-PMSM双螺杆泵受力图
接下来,笔者进行分段分析。
设螺杆的最左端为坐标原点,系统上任意一点的位置为x′,各段的弯矩方程列举如下[15]:
(3)
(4)
(5)
(6)
(7)
(8)
(9)
笔者采用能量法计算螺杆的弯曲刚度,即在螺杆中心点处施加一个单位的力。
单位力矩方程如下所示:
(10)
因此,在某一段螺杆上的形变量为:
(11)
其中,In表达式为:
(12)
式中:Dn—螺杆每一段的形变量,mm;Ln—每一段的长度,mm;M—这一段所受力矩,N·m;M′—单位的力矩,N·m;E—材料弹性模量,MPa;In—这一段的截面惯性矩,m;dn—每一段的直径,mm。
笔者将公式(3~10)代入到式(11)中。其中,D′E′段由于包括两个不同直径,故在计算时D′E′段包含两段形变量。
PDC-PMSM螺杆泵各段形变量如表2所示。

综上所述,PDC-PMSM双螺杆泵系统的总形变量为:
(13)
4 PDC-PMSM双螺杆泵系统模态分析
从文献[16]中可以看出,解析法计算模态分析结果与实际结果误差较大,而有限元法的计算结果更接近实际结果,误差在合理范围内,故笔者采用有限元方法对各阶模态进行分析。
笔者采用有限元法,对双螺杆部分以及PDC-PMSM双螺杆泵系统的两种模型进行模态分析,即选取两种模型主要是用来对比螺杆自身的共振点,以及嵌套PDC-PMSM后整个系统的共振点。
双螺杆模型图如图7所示。

图7 模型图
双螺杆模态仿真如图8所示。
图8 双螺杆模态仿真
通过分析,得到双螺杆各阶固有频率与最大变形如表3所示。
由图8可见:一阶频率为1 422.3 Hz,一阶与二阶固有频率相似。因此,在设定螺杆运转参数时,应避免与固有频率接近,即可有效防止螺杆部分发生共振。
系统模态仿真如图9所示。
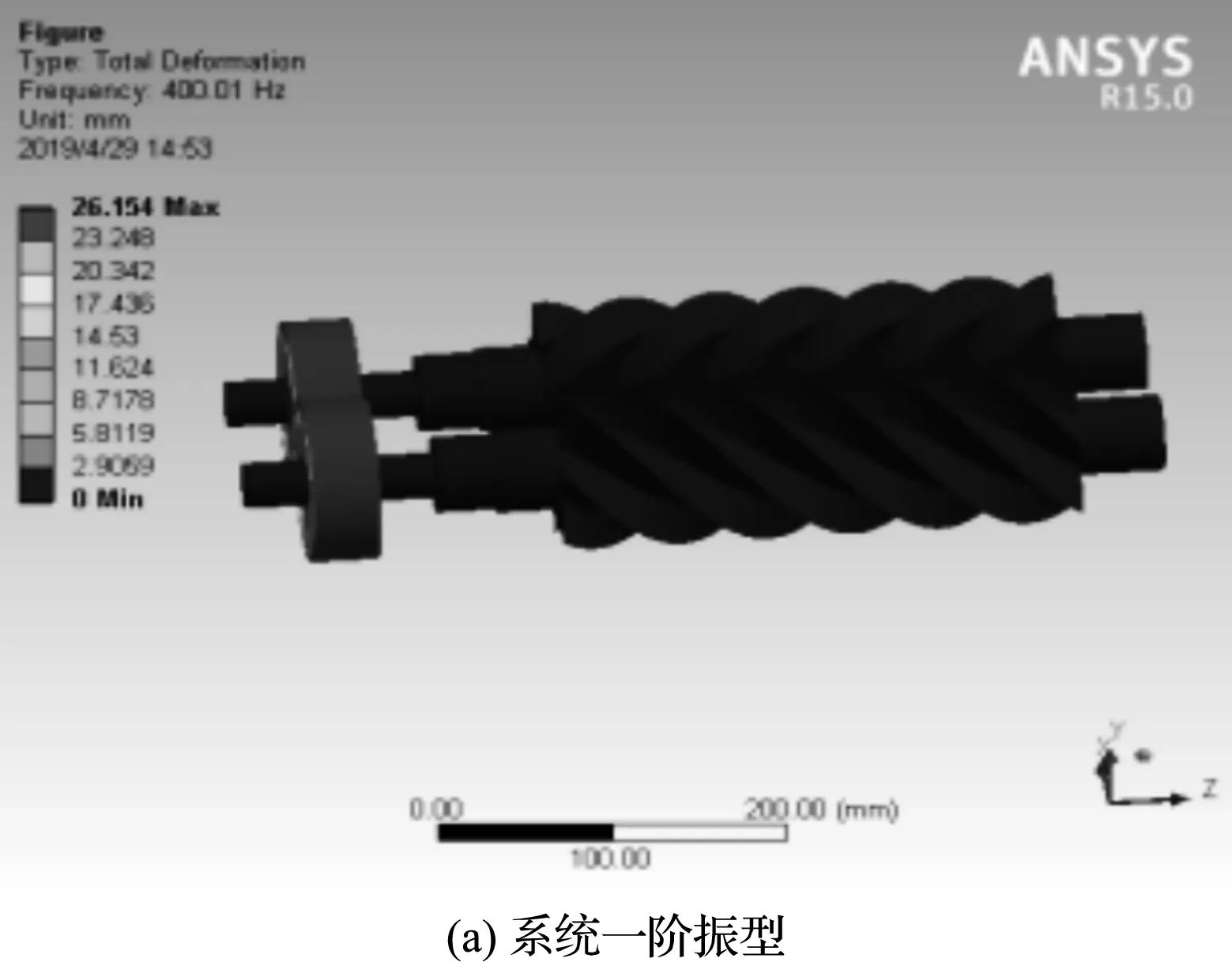
图9 系统模态仿真
系统各阶固有频率与临界转速如表4所示。

由图9以及表4可见:
(1)整个系统一阶固有频率为400.01 Hz,远大于电机的额定频率225 Hz,故在设计时不会产生共振现象;
(2)在转速过万之后,电机发生明显的弯曲变形且振动较大,而对于螺杆部分来说,都未达到螺杆的共振频率,所以螺杆部分均未发生振动。
一阶固有频率对应临界转速的0.75倍为6 000 r/min,可见PDC-PMSM带动螺杆泵的旋转速度4 500 r/min小于一阶临界转速的0.75倍,属于刚性状态。由此可见,该设计合理,能够满足使用要求。
由于系统在三阶振动时螺杆发生扭曲变形,故在实际转动时,应避免其在三阶范围内运行。
系统总形变量如图10所示。
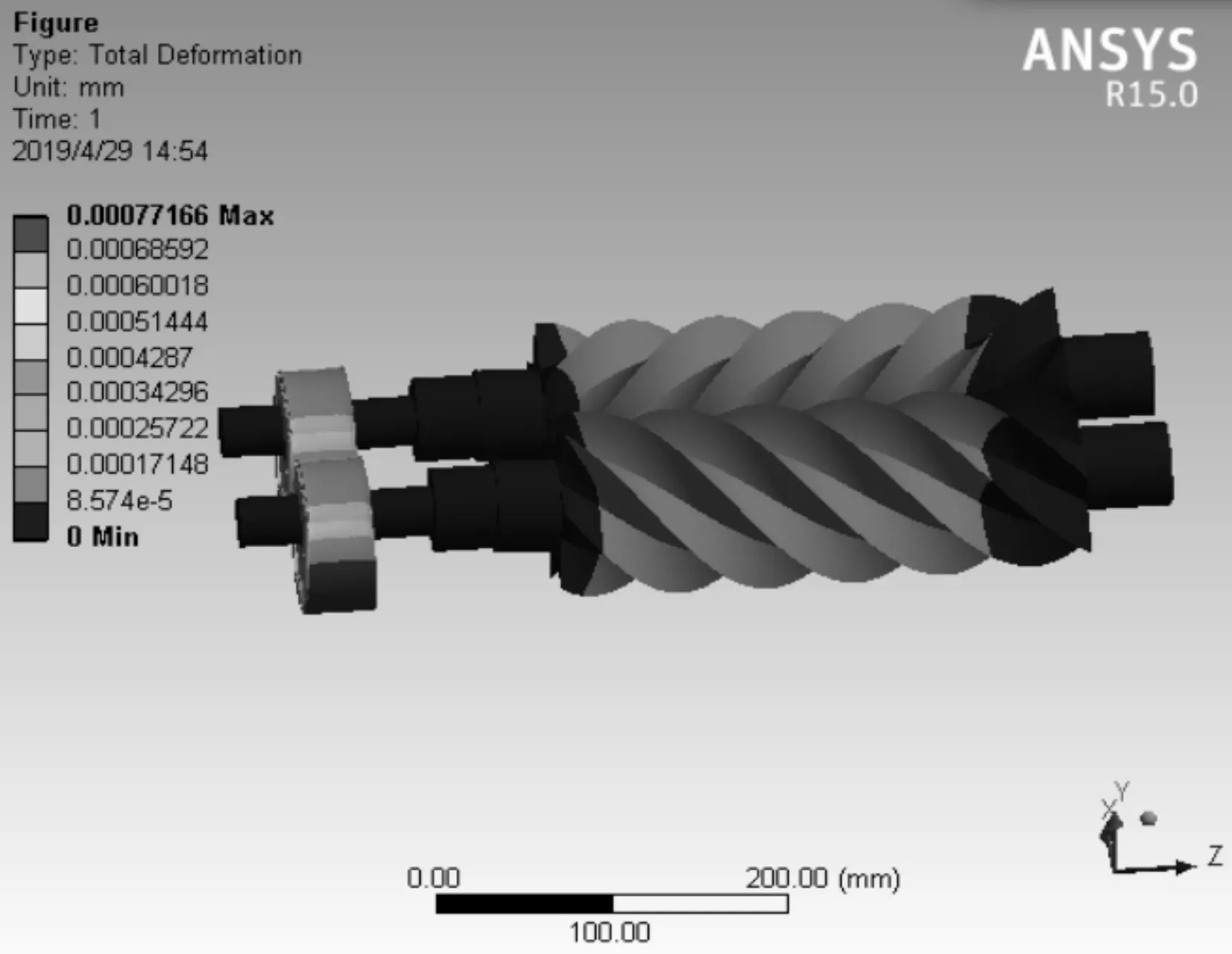
图10 系统总形变量
由图10可见:最大变形位置在电机转子上,形变量为7.72×10-4mm,该结果与解析计算结果非常接近;
系统中最大形变量在电机气隙的10%以内。整体设计合理,满足使用要求。
以上分析均基于理想的条件下,且只施加了简单的圆柱面约束。接下来,笔者通过给模型施加弹性约束,以此来进行模拟仿真,观测不同弹性刚度对系统模态的影响。
不同轴承刚度下固有频率如图11所示。

图11 不同轴承刚度下固有频率
由图11可见:
(1)当轴承刚度在104N/m时,一阶固有频率为75.64 Hz,二阶固有频率为389.53 Hz,此时PDC-PMSM双螺杆泵系统的频率介于两者之间,属于挠性状态,系统可以稳定运行;
(2)当轴承刚度在105N/m时,一阶固有频率为220.43 Hz,系统225 Hz比较接近一阶固有频率,极有可能引起系统共振;
(3)当轴承刚度在106N/m及以上刚度时,各阶频率变化不大,基本趋于稳定,系统频率都在一阶固有频率范围内。
因此,在选取轴承刚度时,要避免产生共振的区域。
同时,在弹性约束条件下,笔者进行有限元仿真,观察当施加不同刚度下系统总的形变量。
不同轴承刚度下系统总变形量如图12所示。

图12 不同轴承刚度下系统总形变量
由图12可见:轴承刚度在104N/m~108N/m时,形变量依次为8.002×10-4mm、7.565×10-4mm、7.667×10-4mm、7.700×10-4mm、7.707×10-4mm;
当轴承刚度在105N/m时,最接近解析计算结果,但此时系统225 Hz比较接近一阶固有频率,极有可能引起共振;
当轴承刚度在106N/m及以上刚度时,系统总形变量变化不大。
5 样机与试验分析
基于上述分析,笔者研制了一台2.2 kW,4 500 r/min的PDC-PMSM样机,并采用反拖法来测量其空载反电动势波形。
反电动势测试平台如图13所示。

图13 反电动势测试平台
PDC-PMSM空载反电动势如图14所示(笔者采用试验和有限元法测量反电动势)。
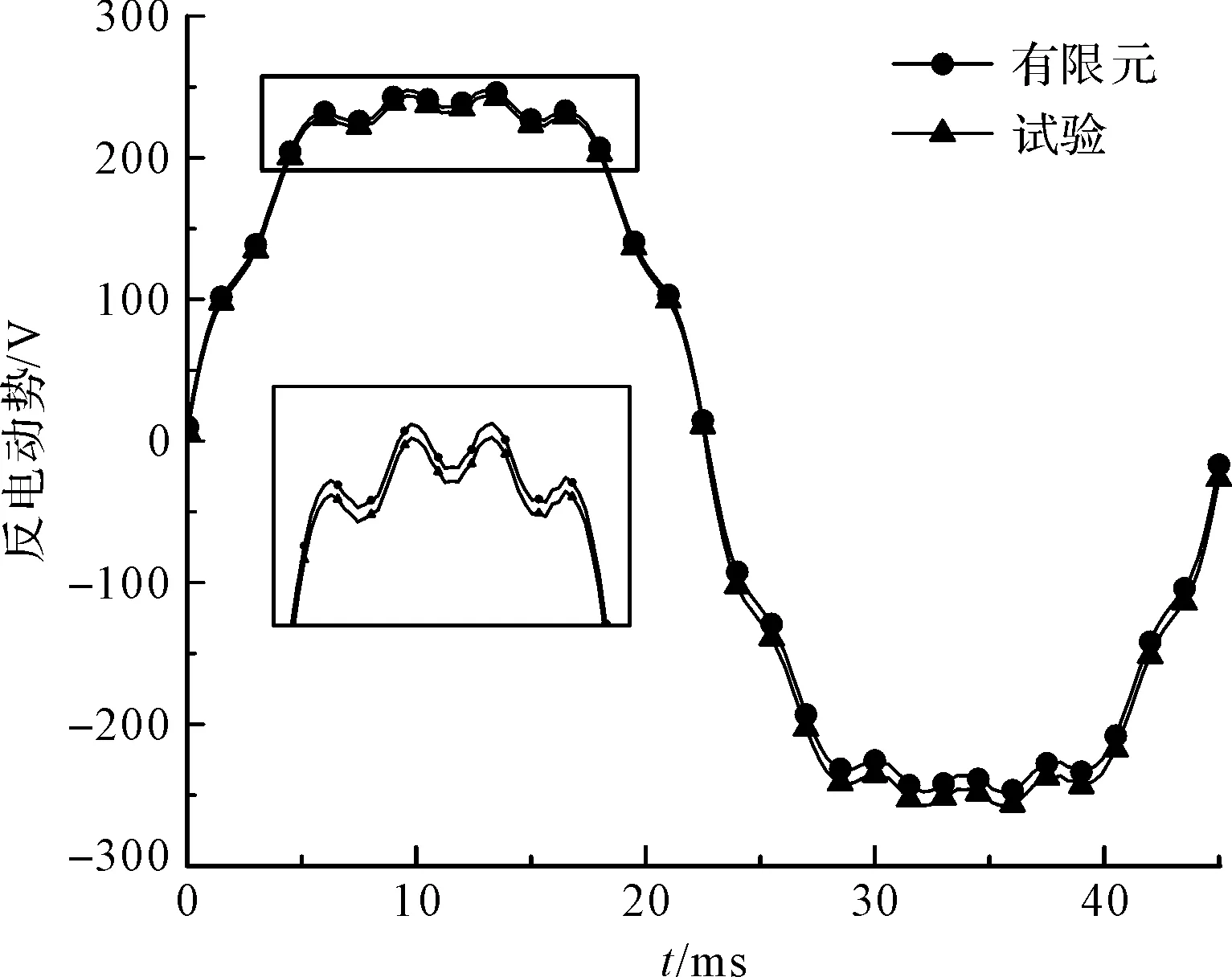
图14 PDC-PMSM空载反电动势
由图14可见,PDC-PMSM实验结果与有限元法仿真结果基本一致,故电机可以稳定运行。
笔者将PDC-PMSM装置在双螺杆泵中,进行负载实验。
PDC-PMSM双螺杆泵系统如图15所示。
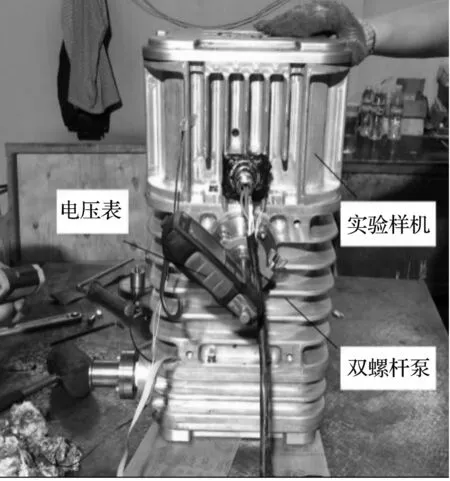
图15 PDC-PMSM双螺杆泵系统
笔者PDC-PMSM采用一台变频器供电,在电机双转子以及螺杆处各放置一个位移传感器,测试在不同转速时,PDC-PMSM双螺杆泵系统的振动赋值。
系统振动幅值如图16所示。
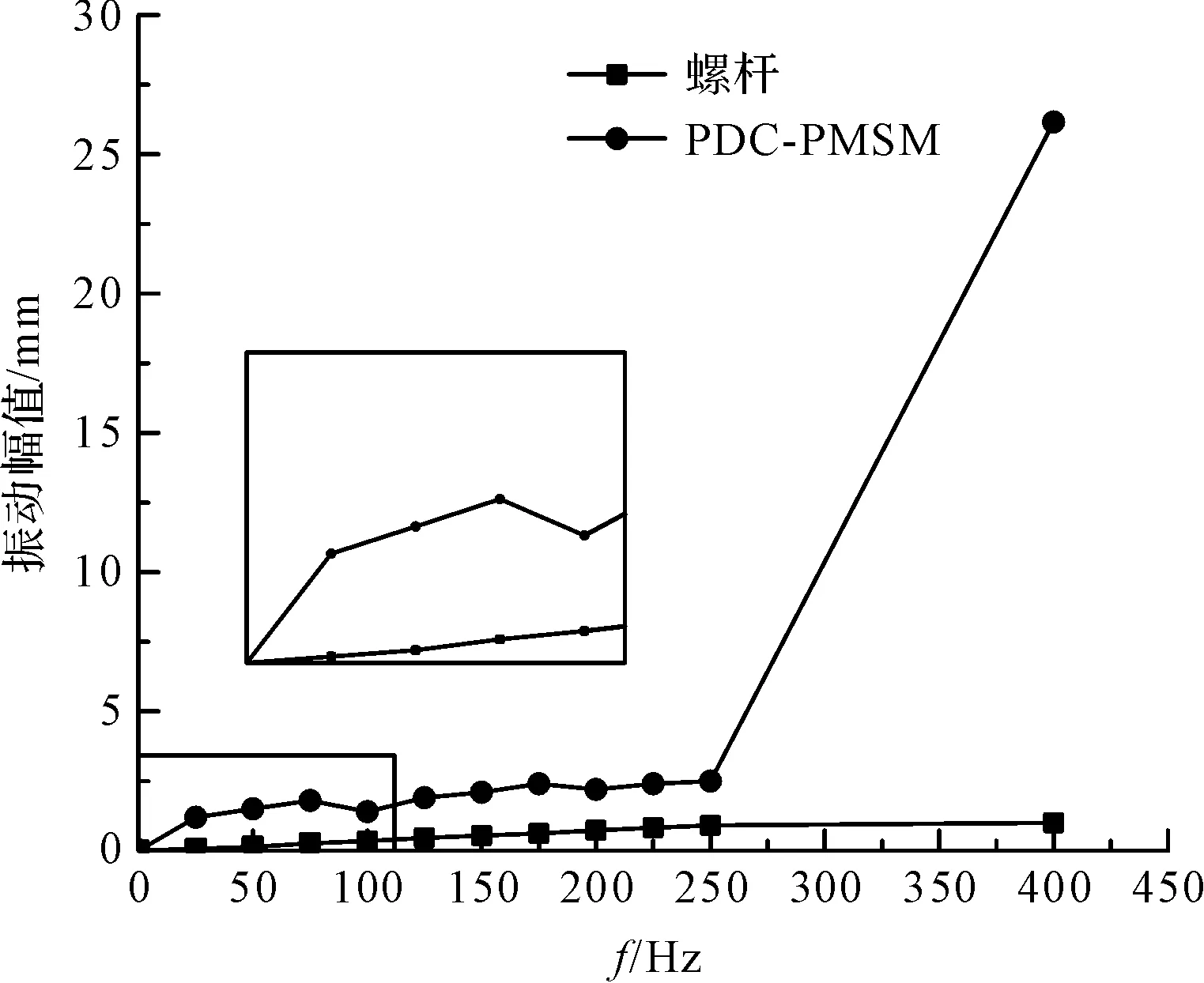
图16 系统振动幅值
由图16可见:电机从开始运行到额定频率225 Hz范围内,系统的振动很小;运行到1.1倍额定频率时,振动依旧比较平稳,振动位移整体趋势逐渐增加,但不影响系统的稳定运行;
强制用变频器将电机频率调整为400 Hz,振动明显加大,这与仿真出来的一阶临界转速相吻合;
而反观螺杆[17,18]部分,无论是PDC-PMSM稳定运行阶段还是转速增大振动阶段,螺杆处均未发生明显的振动,同样与仿真出的结果相对应。
“异步电机+同步齿轮”是双螺杆泵原有的驱动方式,现笔者用采用PDC-PMSM直接驱动双螺杆泵,替代原有驱动方式,并针对上述两种驱动方式进行效率对比。
不同驱动方式系统效率对比如图17所示。
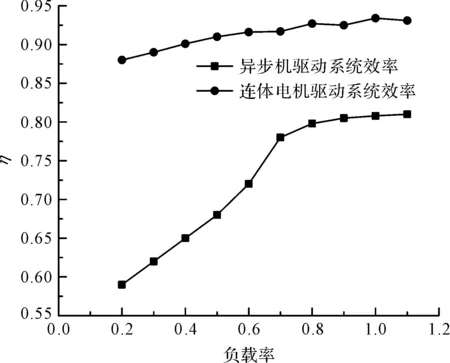
图17 不同驱动方式系统效率对比
由图17可见:在设计中,PDC-PMSM效率为93.8%,从空载逐渐加载至1.1倍额定负载时,测得系统的效率浮动在92%上下,整体系统保持较高的效率;在额定转速、额定转矩情况下,测得系统效率为92%;
采用“异步电机+同步齿轮”驱动双螺杆泵时,异步机需要通过联轴器连接同步齿轮,传递到螺杆的效率会层层减少,同时异步机本身的效率就要比永磁电机低,从空载逐渐加载至1.1倍额定负载时,测得系统的效率浮动在80%上下。
故用笔者提出的PDC-PMSM直接驱动双螺杆泵,其效率得到了大幅度提升。
6 结束语
针对双螺杆泵、挤压类并行对驱传动设备常见的问题,笔者提出了一种并联直驱连体永磁电机,首先介绍了PDC-PMSM的运行机理与设计方法,并设计了一台功率为2.2 kW、转速为4 500 r/min的PDC-PMSM;然后将PDC-PMSM直接嵌套在双螺杆泵上,形成PDC-PMSM双螺杆系统一体化结构,对其进行了刚度解析计算,得出了总形变量;最后对螺杆和采用PDC-PMSM驱动的双螺杆泵系统进行了模态分析,并通过试验对结果进行了验证,同时将其与原有驱动方式进行了对比。
研究结论如下:
(1)给出了PDC-PMSM设计方法。保证切割前后U/fN恒定;保证电机尽可能多条支路的情况下切割掉一条支路,还应保证剩余支路包含成对永磁体;为了保证磁路与普通永磁电机一致,需要尽可能多地设计电机虚槽;
(2)PDC-PMSM设计时避免接近固有频率,以有效防止螺杆的共振。笔者所研究的双螺杆泵系统不存在共振现象,并且此时的螺杆转速小于一阶固有频率对应的临界转速的0.75倍,属于刚性状态;
(3)PDC-PMSM直接驱动的双螺杆泵效率较原有驱动方式得到大幅度提升;同时取消同步齿轮可及时根据负载需求调节电机速度,提高了传动系统可靠性;PDC-PMSM直接嵌套在双螺杆泵上取消动密封;PDC-PMSM直接驱动的方式体积更小、同步性更高。
在接下来的工作中,笔者将对转子间径向不平衡磁拉力进行分析,对电磁力的分布和对应的电磁振动规律进行研究。
