免耕精密播种机自动纠偏装置的研究设计
2022-01-25邹继军
邹继军
(黑龙江省农业机械工程科学研究院 绥化分院,黑龙江 绥化 152054)
0 引言
免耕精密播种机与拖拉机采用牵引式的连接方式,播种机自身配置的地轮为其提供播种和施肥的动力需求,同时地轮还起着支撑播种机和播种机运输行走的功能。为防止免耕精密播种机在偏坡地横向作业时,因地势的坡度变化而导致播种机重心偏移,从而造成播种机沿坡度方向产生滑移或偏移,以及重心与地面垂直方向发生改变,研究设计免耕精密播种机自动纠偏装置,实现免耕精密播种机在小于15°坡地横向的正常作业,保持种、肥播在垄的中心位置,播种、施肥深度一致,满足2~6行免耕精密播种机能够在坡地作业,达到播种深度3~6 cm、施肥深度5~12 cm、种子单粒精密点播和施肥均匀一致的农艺要求,保证作业质量,提高种、肥利用率,降低播种过程中带来的次生成本,提高农作物的生产整体经济效益,避免无效播种、施肥而造成的种、肥损失和补苗等不利生产因素。通过免耕精密播种机自动纠偏装置的研究,能够进一步促进实现播种精细化、产业化、集约化的发展步伐,解决偏坡地精密播种生产的技术问题,为相关坡地作业农业机械提供技术支撑和保障。
1 研究现状
免耕精密播种机与拖拉机连接多采用牵引式的挂接方式,利用播种机自身配置的地轮为播种机提供播种、施肥的动力,同时支撑播种机工作与行走运输,大多以2~6行平地作业为主,播种时一般为垄作、直播的方式。目前,国内免耕精密播种机,多采用平行四杆或单铰链的普通仿形方式,基本可以满足平地播种作业的农艺要求,但是在偏坡地横向作业时,机器重心发生偏移,致使播种与施肥的位置发生改变,使种、肥偏离垄的中心位置,不利于植株后期的中耕、追肥和收获等机械化作业[1]。免耕精密播种机重心发生偏移还会使仿形机构一侧部分或全部失效,致使种、肥的深浅不一,当地块坡度达到仿形极限值时,仿形失效,免耕精密播种机一侧着地,种、肥甚至播于地表,形成无效播种、施肥段,造成大量种子和肥料的浪费,使出苗不齐、不匀、不壮[2]。
针对免耕精密播种机在偏坡地播种效果不好的问题,很多播种机生产厂家都进行过研究与技术改造。勃利某农机制造有限公司在其2行、4行免耕精密播种机的牵引梁上设置有多个调节孔,根据坡地的坡度大小人工调节位置,并在机架上设置有调偏配重装置用以时刻调节播种机的重心,对播种机的重心位置进行随机调节;绥化某农机制造有限公司生产的2行、4行免耕精密播种机在牵引位置设计有调节丝杠,用户可以根据坡度大小的实际情况对牵引点与机架的相对位置进行调节;还有的厂家用液压油缸代替丝杠,利用配套拖拉机的液压机构对机器进行调节,从而解决偏坡地的免耕机械化播种问题。根据市场调研及用户反馈,现有市场上具有调偏功能的免耕精密播种机基本可以满足偏颇地的精密播种问题,但是成本高,操作上比较复杂,技术要求较高,免耕播种机工作效果的好与坏和驾驶员的操作能力与熟练度关系较大,而且还降低了免耕精密播种机的工作效率。
对此,研究设计一种保证免耕播种机在15°以内坡地正常免耕精密播种施肥、深度一致的自动纠偏装置,解决坡地作业时产生的无效播种、施肥,提高工作效率和作业质量,是当前免耕精密播种机作业要着重解决的实际问题。
2 纠偏装置的组成
免耕精密播种机的牵引组件多安装在机器的主梁上,在主梁上端中心位置设置一个上悬挂点,前端主梁中心两侧铰接设置左右两个下悬挂点为牵引悬挂点。上悬挂点与拖拉机中央拉杆连接,用于机器的前后水平调整,下悬挂点与拖拉机的两个下拉杆连接,用于机器的左右水平调整和上下浮动。重心处于机器中心线位置,平地作业时重心方向与地面垂直,重心位置在机组中心线上,机器正常进行作业;机器在坡地顺坡作业时重心方向与地面垂直方向产生一定夹角,但重心方向在机器中心线垂直面内,且中心线垂直面与地面垂直,拖拉机阻力增大或减小,前或后下滑趋势明显,放慢作业速度,对作业质量影响较小;当机器在坡地横向作业时,重心方向与地面垂直方向也产生一定夹角,且重心方向不在中心线垂直面内,机器向侧面倾斜,当坡度达到一定值时,机器倾斜角度过大,无法正常作业。对于牵引式免耕精密播种机而言,单体仿形,可以作业,但种、肥位置和深度将发生不同程度改变。目前,有经验的机手或农户只能采取配重和慢速勉强维持生产,机器一侧种、肥播深较浅,另一侧种、肥播深较深,导致同日播种地块间歇出苗,大小不一,严重影响后续作业进程。对此,研究设计一种坡地横向作业的自动纠偏装置,为相关播种机、耕整地机械等进行配套,使其适应性更强,应用技术更加完善,可具体解决生产中遇到的实际问题。
免耕精密播种机自动纠偏装置的组成分为机械部分和控制部分。机械部分由播种机主梁、纵牵引梁、小横梁、油缸和牵引板组成(图1),两根纵牵引梁、主梁和小横梁铰接组成平行四连杆机构,油缸固定在纵牵引梁和主梁之间,油缸的伸缩改变主梁和小横梁的相对位置,平行四杆机构保证主梁和小横梁始终保持平行,使用时保证牵引板与配套拖拉机可靠挂接固定。控制部分包括马达、电磁阀、光信号处理器反射板和信号源,反射板由红、白、绿三种颜色组成,信号源固定在拖拉机上,中心与拖拉机的纵向中心线重合;控制部分的信号源与拖拉机电瓶连接,产生持续不断的红外信号,为整个装置提供基准信息;反射板的红、白、绿三种颜色区为信号接收装置和转换装置,将接收到的红外信号转换为红、白、绿三种不同颜色的光,同时将三种颜色的光传输到光信号处理器;光信号处理器将接收到的光信号转换为电信号,控制电磁阀的左开、右开或者关闭;采用三位四通电磁阀,有三个工作位置分别控制机械部分油缸伸长、缩短和停止固定;马达为油缸的运动提供液压油,与拖拉机的液压油箱连接。
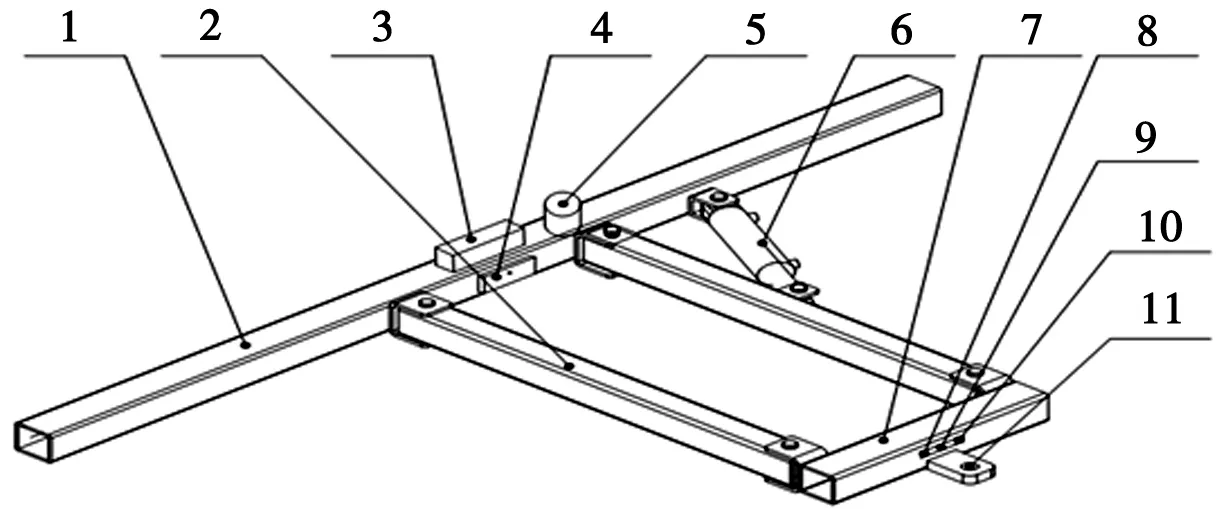
1.播种机主梁;2.纵牵引梁;3.电磁阀;4.光信号处理器;5.马达;6.油缸;7.小横梁;8.反射板红区;9.反射板白区;10.反射板绿区;11.牵引板
3 工作原理
传感器控制技术在农业机械中的应用越来越广泛,包括机械式、光电式、电容式、霍尔式、电磁式等多种方式。该项研究设计的免耕精密播种机自动纠偏装置,采用的传感器技术属于机械式、光电式和电磁式的机电液一体化技术,彼此分工协作,共同完成工作要求,达到设计目的,其工作原理如下[3]。
免耕精密播种机平地作业时,机器重心稳定无偏移趋势,平行四杆机构稳定,信号源发射的红外线信号始终在反射板白色区域跳动。白光被光信号处理器接收后,转换成电信号使电磁阀两端的电磁铁断电,电磁阀处于中立状态,马达旋转工作产生的液压油经电磁阀回到油箱,油缸长度保持不变,免耕精密播种机与拖拉机运动轨迹保持一致。
免耕精密播种机坡地顺坡作业时,机器重心发生偏移,机器产生向前或向后移动的趋势,但信号源发射的红外线信号只是上下跳动,没有偏移出白色区域,白光被光信号处理器接收后,转换成电信号使电磁阀两端的电磁铁断电,电磁阀处于中立状态,马达旋转工作产生的液压油经电磁阀回到油箱,油缸长度保持不变,免耕精密播种机与拖拉机运动轨迹保持一致,对机器作业影响较小。
免耕精密播种机在坡地进行横坡作业时,机器重心方向发生了左右偏移,机器产生向左或向右的移动趋势,信号源发射的红外线信号也产生偏移,当红外线信号经过反射板红色区域时,红光被光信号处理器接收,转换成电信号,使与反射板红端区连接电磁阀的电磁铁接通开始工作,电磁阀油路接通,马达驱使油缸工作,使油缸伸长,推动纵牵引梁和小横梁移动,使信号源发射的红外信号重新回到反射板的白色区域,光信号处理器接收到白光后,转变为电信号,使电磁阀重新回到中立状态保持油缸长度不变;信号源发射的红外线信号经过反射板绿色区域时,绿光被光信号处理器接收,转换成电信号使与反射板绿端区连接的电磁阀的电磁铁工作,电磁阀油路接通,马达驱使油缸缩短,带动纵牵引梁和小横梁回移,使信号源发射的红外线信号重新回到反射板的白色区域,电磁阀两端的电磁铁断电,电磁阀重新回到中立状态保持油缸长度不变。
免耕精密播种机自动纠偏装置研究设计的核心是发射板的红、白、绿三个区域,其中白色区域的宽度设置决定该装置的工作精度,其宽度值的设置也不是越小越好,既要根据播种机的农艺工作要求,也要考虑系统的响应时间等多个因素。红、绿两个区域也是一样要考虑系统的反应时间问题。整个系统是由信号采集与处理、液压系统及控制、机械系统的响应与反馈三部分组成,集合了光电一体化技术、液压控制技术等,其电源和液压辅件利用配套拖拉机现有结构,且结构简单,性能可靠,适应性较广,具有很好的实用性和可操作性。
通过控制部分的工作,能够保证免耕精密播种机工作时与拖拉机的运动轨迹保持一致,从而保证播种、施肥位置的准确,机器作业质量左右一致,为后续生产在时间、质量、技术等方面提供有效保障。其主要运动参数的设计采用多套传动、传感方案实验,进行对比,优化选择,确定主要运动参数。
4 目的意义
以黑龙江省为例,丘陵地带占全省耕地面积的60%左右,为了保证土壤与水分不流失,大多数耕地都是采用横向于坡度方向进行播种作业,部分地区在坡度较大的区域修成梯田以减少坡度对耕地的影响,在坡地进行播种、中耕、整地及机械化收获作业,作业效果都受到非常大的影响,对农机具的适应性都具有非常大的考验。
免耕精密播种机自动纠偏装置研究设计的目的是实现以2~6行免耕精密播种机在15°以内坡地正常作业,达到播幅内种、肥播深一致的农艺要求,保证播种机作业质量,提高种、肥利用率,降低机械化成本,提高作物生产整体经济效益,避免无效播种、施肥造成的浪费等不利生产因素,利于黑龙江省生态农业、绿色农业、黑土地保护等各项事业的发展。同时也为在坡地作业的农业机械提供技术探索与技术储备。
免耕精密播种机自动纠偏装置研究设计的意义在于,加装该装置的播种机或其他机器能够适应不同地域、不同地形、在一定坡度范围内高效机械化作业,规避无效播种施肥段或无效作业段的形成,避免种、肥浪费,减少机器进地次数,降低了农业生产的用工成本,提高经济效益;再次该装置可为其他农业机械配套,解决坡地作业技术难题,提高农业机械的实用性、适应性和操作性,有利于提高相关农业机械的市场竞争力。
5 结语
免耕精密播种机适用于平川地、顺坡地及横坡地坡度较小地块作业,横坡地坡度较大地块作业弊端、浪费生产资料、不符合农艺要求等现象显而易见,机具的适应性及实用性受到很大制约,大量农机工作者为解决这个问题做了很多探索,但由于自动化程度不高,同时对操作者的技术要求较高而影响了机械的作业效率。免耕精密播种机自动纠偏装置研究设计是集光电一体化技术、液压控制技术与机械控制技术为一体的技术集成,为横坡地大坡度机械化作业提供全新的技术解决方案,该方案与相关机器配套,可以适应不同地况条件下的不同作业要求,提高了农业机械的实用性、适应性和操作性,解决了横坡地坡度较大地块作业关键的技术问题。
(05)