AGV激光导航中反射板布设研究
2022-03-01刘文涛朱洪涛白慧丹
刘文涛,朱洪涛,白慧丹,肖 勇
(南昌大学,江西 南昌 330031)
1 引 言
自动导引小车(AGV)广泛应用于生产制造、物流、仓储等场景下,是工业自动化环节中的重要一环。目前,AGV的导引方式主要有磁条、二维码、视觉、激光等。其中,基于反射板的激光导航AGV,是通过其车载激光雷达探测并识别出环境中的3m反射板,经过定位算法(如三边定位算法)实现AGV的全局定位,从而进行导航。这种导航方式受外界环境干扰小,定位精度高,应用十分广泛。
基于反射板的激光导航是依赖反射板实现定位的,其定位精度不仅与激光雷达的测距精度有关,还与反射板数目和几何布局有关系。文献[1]~[4]介绍了AGV激光导航定位的基本原理和实现。文献[5]指出定位精度与反射板的数目和分布有关,且两相邻反射板间的夹角相等最好。文献[6]介绍了精度因子的概念计算方法以及其与定位精度的关系。文献[7]介绍了精度因子在超宽带应急定位基站布设中的应用。鉴于上述分析,本文引入水平精度因子作为衡量反射板布局质量的一个重要参数。通过分析HDOP值的分布情况,合理布置反射板的数量和几何分布,调整AGV的工作路径,使AGV的定位精度达到最优。
2 基于最小二乘法的多边定位算法
假设激光雷达探测到AGV附近n(一般大于3个)个反射板,并采集到激光雷达与每个反射板的距离ri,分别用r1,r2,…,rn表示。已知每个反射板的全局坐坐标分别为(x1,y1),(x2,y2),…,(xn,yn),则AGV全局坐标(x,y)的观测方程组为:
(1)
其中,δ1,δ2,…,δn表示激光雷达的测量误差。
将式(1)做差线性化,可得:
(2)
式(2)可化简为:
AX=b
(3)
其中:
基于最小二乘法,使残差最小可以解出AGV的全局坐标为:
X=(ATA)-1ATb
(4)
3 定位结果评价
在这里,仿照GPS中的精度稀释因子(Dilution of Precision,DOP)的概念,来给出AGV定位精度的解释。由于AGV的定位是在二维平面内进行的,所以这里仅使用水平位置精度因子(HDOP)进行计算。
设X=(x0,y0)T,δX=(δx,δy)T分别用来表示AGV全局坐标的初始值和改正数,将式(1)的观测方程组线性化得出:
(5)
公式(5)可以简写为:
BδX=L0
(6)
权系数矩阵为:
(7)
水平精度因子HDOP可以表示为:
(8)
4 实验分析
本文设定了4种反射板布设方案,通过对水平精度因子HDOP的分析以及定位仿真定位实验,研究反射板的布局对AGV定位结果的影响。实验仿真的场景为40 m×40 m的方形场地,不同方案的反射板布置如表1所示。
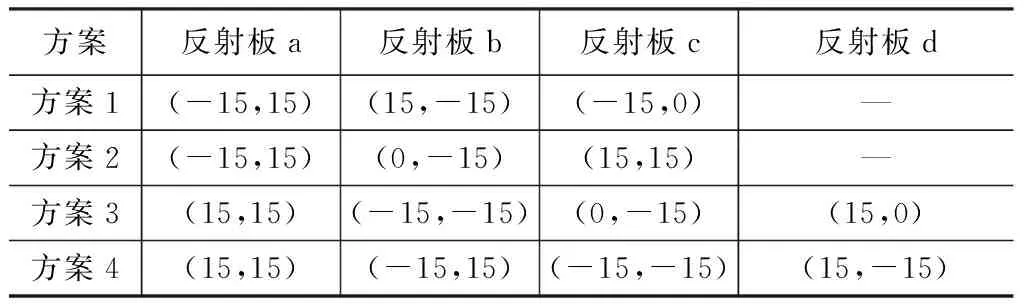
表1 反射板位置坐标
方案一:3个反射板,并且3个反射板围成的几何图形为钝角三角形。
方案二:3个反射板,并且3个反射板围成的几何图形为正三角形。
方案三:4个反射板,并且4个反射板围成的几何图形为梯形。
方案四:4个反射板,并且4个反射板围成的几何图形为正四边形。
4.1 水平精度因子等值线分析
根据4种布设方案中的反射板坐标以及式(5)和式(7),可以得到图中任意一点的HDOP值,并生成40 m×40 m范围内HDOP值的等值线图,实验结果如图1所示。

由图1可知,上述4种方案中,在反射板所围成几何图形的中心区域,HDOP的值较小,在几何图形的外围区域,HDOP值显著增加;对于靠近某一反射板的点位,其HDOP值有较大的上升趋势;在反射板数量相同的情况下,具有对称结构的方案2与方案4的HDOP值较小,即当反射板均匀分布于定位点四周时,HDOP值较小;方案4与方案3相比,合理地增加了反射板的数量,也降低了HDOP的值,从而获得了较大的精确定位区域。
4.2 定位仿真实验分析
根据第3节中的定位模型,在面积20 m×20 m的区域内,进行定位仿真实验,样本点在矩形轨迹((-4,-4),(10,10))上每隔2 m取一个点。激光雷达的测距值用反射板与样本点之间的距离表示,并添加服从N(0.02,0.05)的高斯分布误差使仿真结果更真实。样本点的定位结果如图2所示,定位误差与HDOP值的变化关系如图3所示。

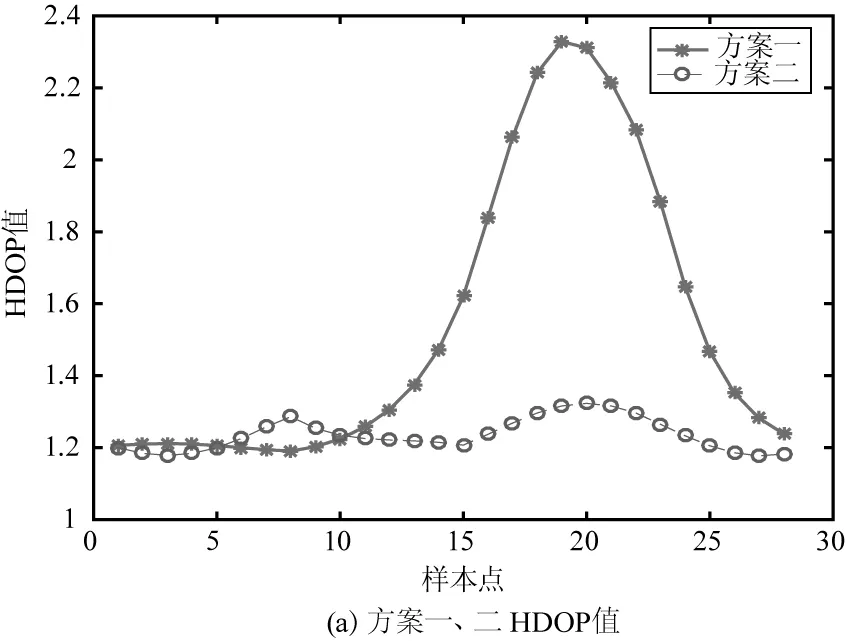
图3 HDOP值与定位误差
在上述四种反射板布局中,由图2可以看出,方案四的定位结果与定位轨迹匹配度最好,方案一的定位结果较差。由图3可知,HDOP在一定程度上反映了定位精度的好坏,方案二、四的HDOP值较小,其定位误差也明显小于方案一、二;具有不规则几何形状的方案一和方案三,其定位误差明显大于具有对称性的方案二与方案四;从反射板数量上来讲,方案四的HDOP值和定位精度明显优于方案三,说明适当增加反射板的数量可以提高定位精度。
5 结 语
本文通过仿真定位实验,分析了四种反射板布设方案的HDOP值分布情况,以及HDOP与定位误差之间的联系,得出以下结论:
(1)在基于反射板的AGV激光导航系统中,HDOP可以一定程度上反映定位精度的好坏,可以通过计算HDOP的值来预估反射板的布局质量。
(2)正如直观地理解4反射板的布局优于3反射板布局,具有对称性的反射板布局方案要好于其他不规则形状的。
(3)当AGV位于反射板围成几何图形的中心时,反射板之间相互作用,有误差淡化的效应,定位误差也较小;当AGV靠近某一反射板或位于反射板包围图形之外时,误差的淡化效应减小,其定位误差也会增大。