基于改进NSGA-Ⅱ的左转待行区交叉口配时优化控制
2021-12-26仇俊政孙传龙刘晓童
李 燕,赵 红,牟 亮,仇俊政,孙传龙,刘晓童
(青岛大学机电工程学院,山东 青岛 266071)
0 引言
由于人口和机动车数量的快速增长,交通拥堵对人们的日常生活产生了重大的影响。许多学者在改善交通拥堵方面做了大量的研究,如公交优先策略[1],智能交通系统[2]等。交叉口作为智能交通系统的重要组成部分,对交叉口进行合理的优化设计及配时,可以降低车辆延误,对节约能源、减少污染起着重要的作用[3]。
对于左转车流饱和度较大的交叉口,左转专用车道和左转待行区的设置,大大降低了排队过长的问题[4]。基于交通流波动理论,倪颖[5]探讨了设置左转待行区对交叉口通行能力的影响;李静[6]从通行效率、燃油消耗、交通安全、空气污染、温室效应以及噪声污染6个方面对交叉口有无左转待行区的通行能力进行评价,结果表明建立左转待行区后交通平均成本下降了近25%。Ren Chuanxiang等[7]提出一种带有共享车道的交叉口控制模型和控制策略,提高了高峰时段左转车辆较少情况下的通行能力。
目前对左转专用车道和待行区设置的研究往往从其设置条件和对车道通行能力的影响方面考虑,并大多得出其设置提高了通行能力的结论[8],忽略了相应的会造成左转相位停车次数增加,直行相位车辆延误增大,车辆在停车、启动过程中运行工况受到影响,从而造成排放增加等问题[9]。因此在考虑延误和环境效益的前提下,有必要对设置待行区后的交通配时进行研究,讨论在排放和延误双目标下达到最优状态时的信号配时方案。
当前,大量学者在多目标优化配时方面有许多研究。刘畅等[10]采用模糊偏好的方法对交叉口人均延误和人均CO排放进行优化。李振龙[11]等运用遗传算法,通过分配权重系数的形式综合考虑了车辆延误,排队长度和尾气排放三方面性能。当前处理多目标问题,大多将其转化为单目标优化问题,如将多目标函数进行加权处理。由于多数优化目标之间不是简单的线性关系,并且加权系数的设置具有主观性,使得这种方法只能得出一个近似最优解。高云峰等[12]基于快速非支配排序遗传算法和元细胞传输模型进行多目标优化和仿真,表明多目标优化可以得到更好的结果。
基于现有研究,本文将从信号控制角度出发,提出设置左转待行区后的车辆延误和排放模型,以青岛市典型道路南京路与江西路交叉口作为案例,针对快速非支配排序遗传算法存在搜索能力弱以及收敛性差的问题,对算法进行改进,采用改进后的NSGA-Ⅱ算法来对双目标模型进行信号配时优化,得出更加优化的配时方案,达到优化交通环境,提高交通效率的目的。
1 多目标模型的建立
目前降低交叉口的车均延误是提高交叉口通行能力的主要措施,而机动车产生的尾气是造成环境污染的主要原因之一。因此,本文从交叉口车均延误和机动车尾气排放两方面进行综合评价,建立车均延误和CO排放多目标模型进行交叉口信号配时优化。
1.1 延误模型
设无初始排队,对于城市道路交叉口,一般采用的韦伯斯特延误公式[13]模型不再适合,而HCM2000延误计算方法考虑了初始排队对延误的影响,更加适用于城市道路交叉口比较拥挤的特点。对于单点交叉口,以相位绿灯时间和单位周期为变量,采用均匀延误d1与随机延误d2之和的形式,延误公式为[14]:
dij=d1ij+d2ij
(1)
(2)
(3)
其中,dij为i车道j相位的车均延误(s),λj为j相位的绿信比;Xij为饱和度;C为信号周期的时长(s);cij为通行能力(pcu/h);T为分析持续时间;K为感应控制的增量延误修正系数,对于定周期信号,K取0.5;I为上游信号灯车辆变换道和调节的增量延误修正系数,这里I取1.0。
假定所有车流均为随机到达,对于非拓宽左转车道,增设左转待行区后,采用停车线法的左转通行能力为[15]:
(4)
其中,tgj为第j相位绿灯时间(s);t0为左转平均车头时距(s/pcu);vt为左转车辆进入交叉口的平均车速(m/s);a为左转车辆进入交叉口的加速度(m/s2);n为进入待行区因红灯而滞留在待行区的车辆数。
采用停车线法,单条直行车道通行能力为
(5)
其中,t1为损失时间,由启动损失时间和清尾损失时间组成,其中启动损失时间为头车对于绿灯启亮开始行车的反应时间,由不饱车流释放所导致的时间损失和待行区车辆启动并产生了往后传播的交通波所带来的时间损失组成;th为平均车头时距(s/pcu)。
由此可以得出交叉口的车均延误为
(6)
qij为i车道j相位的交通流量(pcu/h)。
1.2 排放模型
研究表明,机动车排放中CO含量达71.5%[16],因此可以用CO排放代替污染物排放进行研究。交叉口尾气排放可分为各条进口路段的行车排放和车辆的怠速排放,其中车辆在交叉口的怠速时间应为车辆停车延误时间[17],故得到一个周期内车辆在交叉口的CO排放总量E的计算公式[18]为

(7)
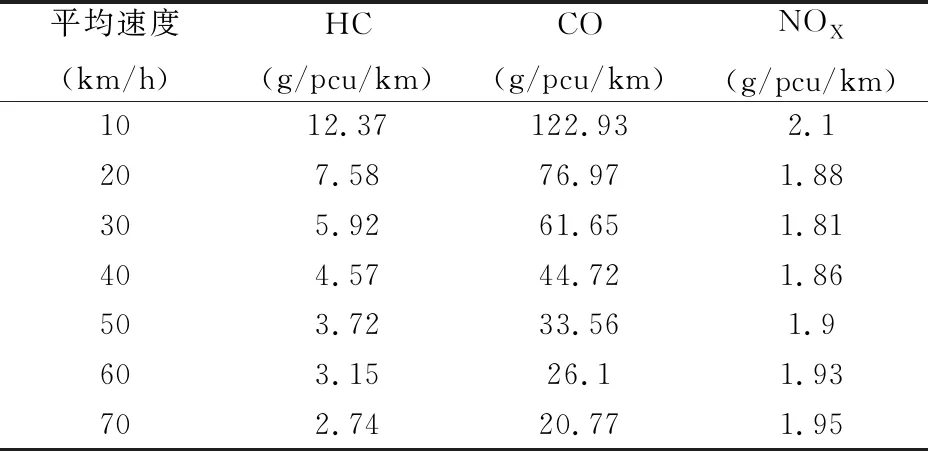
表1 小型车不同速度下污染物排放因子
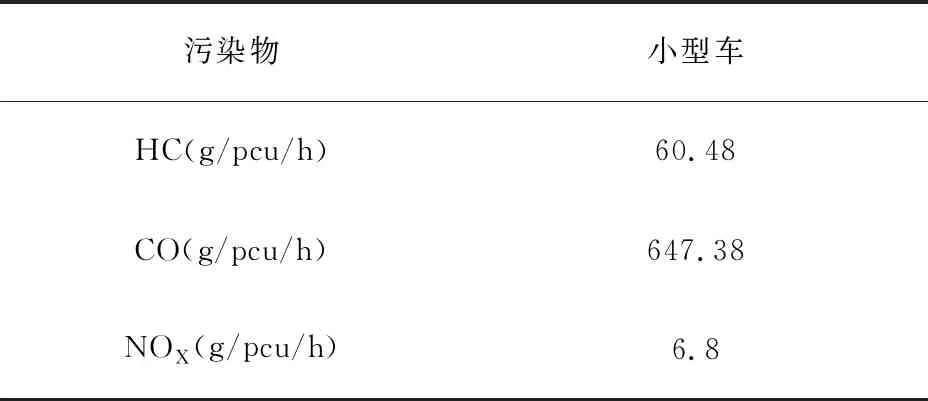
表2 小型车怠速状态下污染物排放因子
1.3 建立优化目标模型
本文的研究对象为单点交叉口,在该交叉口内以车辆延误D及CO排放总量E最小为目标的多目标优化模型,其模型以及约束条件如式(7):
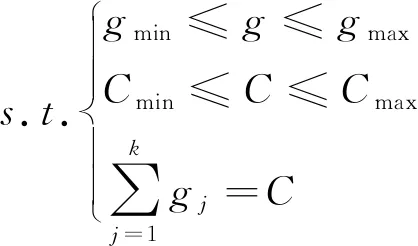
(8)

2 算法基本概念及改进
2.1 NSGA-II算法
快速非支配排序[19](Fast Non-Dominated Sorting),针对NSGA-I中的不足,通过非支配排序算法对种群进行分层,降低计算复杂度将第一代算法的计算复杂度O(MN3)降为O(MN2)(M代表目标个数,N代表种群个数);采用了拥挤度和比较算子,替代指定的共享半径,当排序过程中出现同级个体时,使用拥挤度及其比较算子作为次级排序的依据,从而保持了种群的多样性;引入精英策略,通过结合父代和子代的种群扩大采样空间,防止错失最优解。
2.2 改进的NSGA-II算法
NSGA-II算法是解决多目标优化问题常用的算法之一[20],但经典NSGA-II搜索能力较弱并且收敛性较差,为了提高NSGA-II算法的收敛性和搜索范围,以获得更好的解,提出了两种改进方法。
2.2.1 根据算法迭代扩大种群
新种群的产生依赖于初始种群的随机产生,在不改变选择交叉变异的前提下,将初始种群扩大有利于提高优秀个体被选中的概率,所以设初始种群N在原有的基础上扩大1.5~2倍,扩大初始种群,有利于提高第一代种群的质量[21]。NSGA-II先将父代种群Pt与子代种群Qt合并成新种群Rt,将Rt进行精英策略选择优良个体作为新的父代种群,此种方法保证父代种群中的优良个体不会遗失。在运算前期,将种群数量控制在1.5~2倍,扩大搜索范围,同时提高种群混合交叉变异产生优秀个体的概率,提高种群多样性。在运算后期,种群数量降低为N,加速种群收敛。
2.2.2 自适应交叉算子
NSGA-Ⅱ算法大都采用二进制锦标赛法交叉选择,交叉算子实现起来比较简单,但是移动空间的范围比较小,因此搜索能力相对较弱,容易陷入局部最优。针对经典NSGA-Ⅱ的早熟现象和收敛速度慢的不足,提出一种自适应交叉算子的快速非支配遗传算法。在迭代前期应提高搜索范围,使其跳出局部最优;在迭代后期,整个种群趋于稳定,大部分的最优解都聚集在最优Pareto周围,因此可以缩小搜索空间,使算法加速收敛。张敏等[22]提出一种基于正态分布的实数交叉(Normal Distribution Crossover,简称NDX)算子,与二进制算子相比具有更大的搜索空间,解集质量明显提高。基于上述研究,提出将二进制交叉算子与NDX算子相结合的形式,迭代前期倾向于NDX算子,后期使二进制交叉算子权重变大,并根据迭代次数自适应的进行调整。混合交叉算子的更新公式为
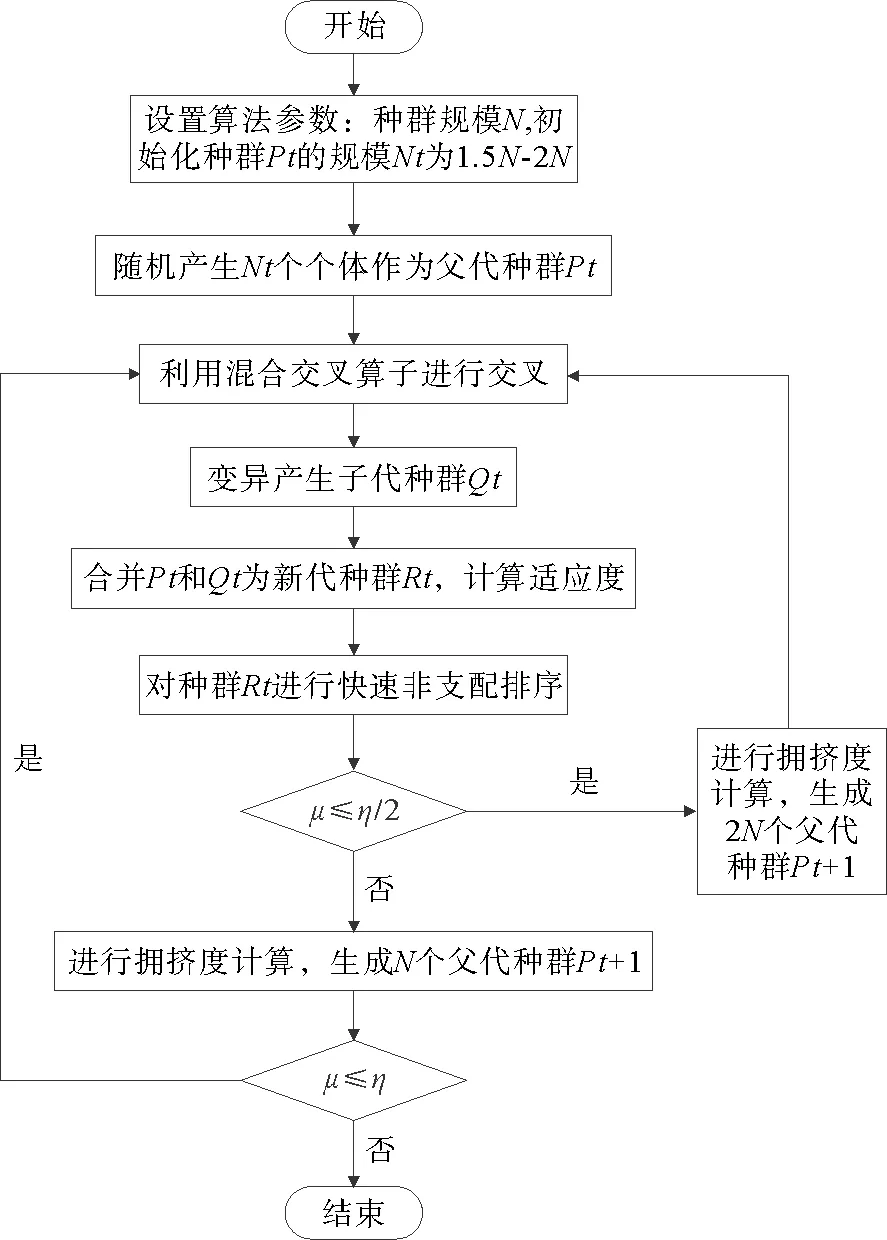
图1 改进的NSGA-II算法计算流程
(9)
其中,μ为当前迭代次数,η为最大迭代次数;M=P1+P2,N=P1-P2,其中P1和P2为选中的用来交叉产生子代的父代个体。beat表示正态分布随机变量即会生成与种群长度数量相同并大小服从正态分布的矩阵。α为交叉深度因子,经测试当α为上述值时,算法能够获得更好的收敛性和解的分布性。流程图如图1所示。
3 案例仿真分析
3.1 数据采集
选取青岛市南京路江西路交叉路口为研究对象进行实例分析,该交叉口各进口道包含左、直、右3个通行方向,交叉口机动车相位采用南北直行,南北左转,东西直行,东西左转的典型四相位设置,行人相位与机动车直行相位对应。通过现场调查的方法得到晚高峰(17:30-18:30)时段各方向左转和直行的交通量,如表3所示,城市道路中行驶车辆基本是公交车和小汽车,公交车折算成标准车的折算系数为2.0,小汽车折算成标准车的折算系数为1.0。

表3 交通流量数据
该交叉口实际路况图如图2所示。
3.2 结果分析
运用MATLAB求解上述交通信号多目标优化模型的算法,将改进的NSGA-II算法与原始配时方案,权值法(晚高峰时段,权值系数更应偏向于降低车均延误目标)以及NSGA-II算法进行对比。设定初始种群N为200,迭代500次,对每种算法运行20次取平均值,分别得到优化后的相位绿灯时间及周期,执行结果如图3所示。
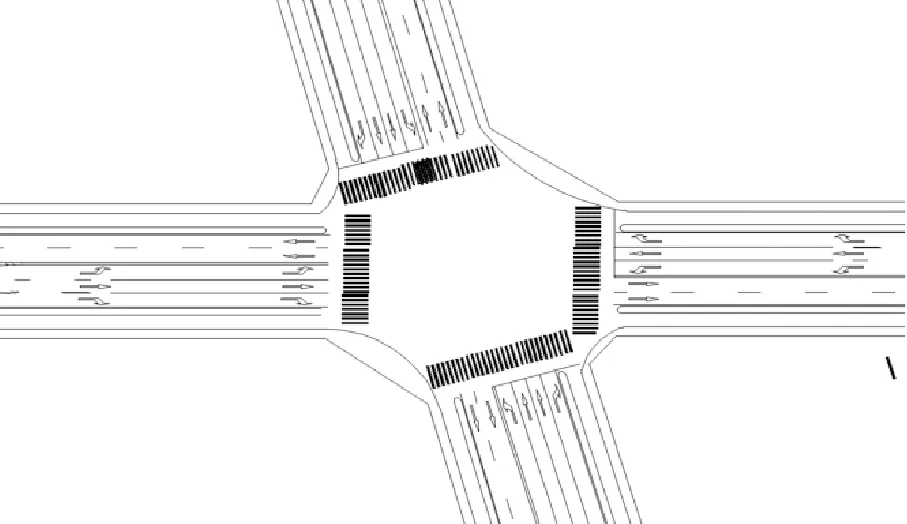
图2 交叉口实际路况图
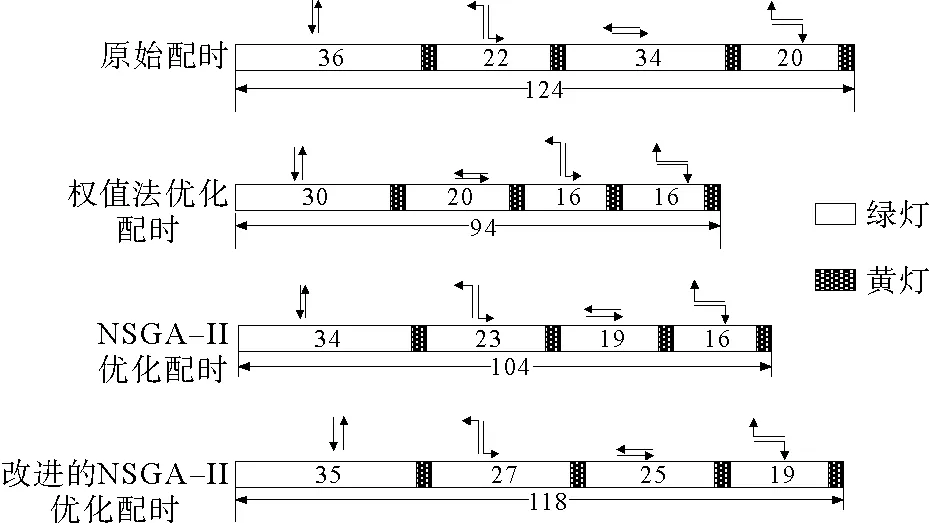
图3 配时方案优化结果对比
为更加清晰地看出改进前后算法对目标函数值优化程度,在优化过程中将两个目标函数分别与交叉口原始配时方案的车均延误和车均CO排放相除,以此将两个目标函数放在同一标准下进行分析。如图4中a-d所示,在算法执行时间相近的情况下,随着迭代次数的增加,改进之前在第432代达到最优,改进后的延误值在第165代达到最优,说明改进后的算法在延误值寻优方面速度更快;改进算法后,排放在第184代达到最优,搜索效率提高了57.4%。
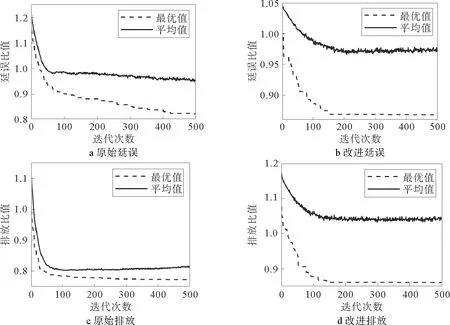
图4 改进前后优化值迭代曲线
针对4种不同配时方案,以实际流量数据作为基础,通过微观交通仿真软件VISSIM建立青岛市南京路江西路交叉路口模型,对交通控制信号优化前后分别进行仿真,获取车均延误,排队长度等交通流性能指标。将公交车、小轿车统一折算为标准车辆,仿真时间为3 600s。选用的Wiedemann 74模型更适应于市区内的道路驾驶,设置平均停车间距为2m,安全距离的附加部分为2.00,安全距离的倍数部分为3.00。经过模型校正后,仿真5次取平均值。为更好地对比交叉口各通行能力性能指标,本文将现状交叉口配时方案下获得的各指标值视为100%,得出如图5所示的车均延误,平均排队长度和车均停车延误对比值。
图5可以看出,在交通流量高峰时段权值法对于车均延误,平均排队长度和车均停车时间都是最优的,最高优化可以降低车均停车延误27.6%;利用改进的NSGA-II算法获得的配时方案,平均排队长度可减少11.8%,车均延误下降18.3%,对比未改进前NSGA-II算法,车均延误优化了11.7%,这说明改进NSGA-II算法优化得到的配时方案对交叉口运行状态具有一定的改善效果。将现状交叉口性能指标数值视为100%,对比各优化后性能指标相对值可得出结果如图6。
图6所示,改进算法后的优化配时各项仿真结果都是最优的,与现状配时的排放污染浓度相比,改进NSGA-II算法后,CO排放降低了13.5%,比未改进的方案减少了1.5%;同时,在考虑车均延误和CO排放双目标下,对其他主要污染物如HC,NOX排放量进行对比,发现改进后的配时方案对两污染物排放均具有改善作用。其中HC降低了2.1%,同时NOX排放也降低了2.1%。该方法考虑了车辆通行能力与环境污染多方面的综合效益,将改进NSGA-II算法应用于单点交叉口信号配时优化控制中能够有效地降低车均延误,提高车辆的通行能力。
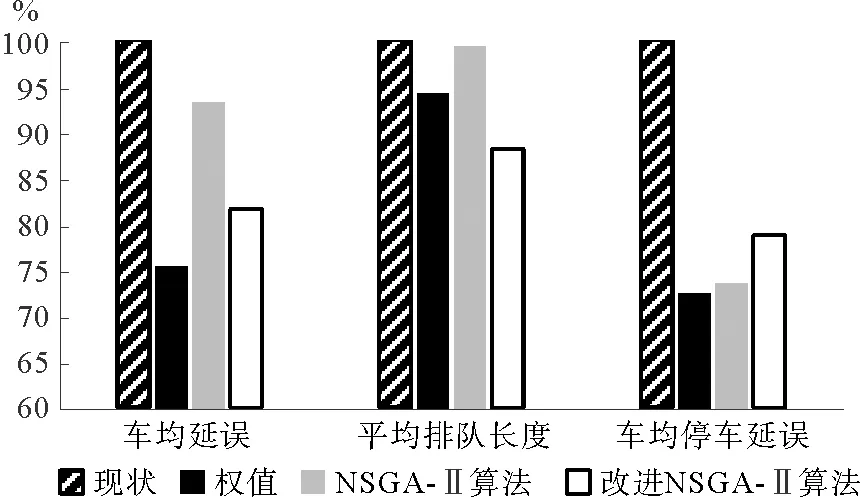
图5 交叉口通行性能相对值比较
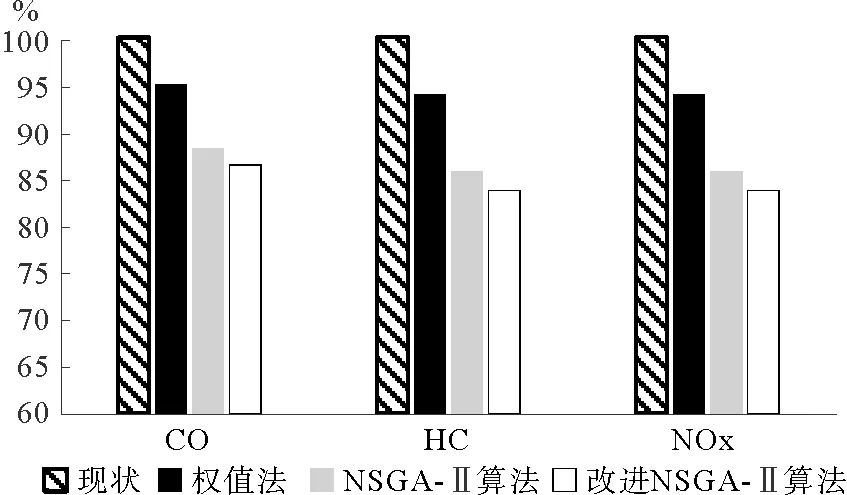
图6 交叉口污染物排放性能相对值比较
4 结语
城市道路中,左转待行区的设置可以解决排队过长问题,提高通行能力。但相应地会造成因机动车怠速时间过长引发的排放污染物和燃油消耗量增加等问题。本文针对城市道路中具有左转待行区的交叉口信号配时多目标优化问题,从车均延误和CO排放角度出发,建立了平面单点交叉口多目标优化模型,对于NSGA-II算法易陷入局部最优及收敛性较差的问题,提出扩大种群和改进交叉算子的方法,前期扩大搜索范围,后期加速收敛。将改进后的算法运用在交叉口信号配时多目标优化模型中,对青岛市南京路江西路交叉路口进行数据采集,通过VISSIM仿真分析,同时考虑NOX排放,HC排放以及各道路通行能力指标在改进前后的变化。经验证,该方法在有左转待行区的交叉口配时优化控制中具有显著的优化效果,获得了良好的综合效益。
本文仅对高峰时段交叉口信号配时进行优化,在后续的工作中,可将改进的NSGA-II算法应用于平峰时段,对于直行待行区域进行设置优化也将是以后的研究重点,使模型更加适应于工程实践中。
