城市客车加速踏板防误踩系统设计及验证
2021-12-24赵苗苗芮苏黔
赵苗苗, 芮苏黔
(扬州亚星客车股份有限公司, 江苏 扬州 225116)
汽车加速踏板防误踩系统是为了在特定情景(如驾驶员注意力不集中或驾驶技术不熟练)下,避免驾驶员因误踩加速踏板而造成交通事故[1-6]。目前该系统已在城市客车上逐步应用,本文将针对城市客车的特点对该系统进行研究,从加速踏板防误踩系统的功能实现、结构和控制方案等方面来进行设计及验证。
1 油门防误踩系统结构方案
GB/T 39263—2020《道路车辆 先进驾驶辅助系统(ADAS)术语及定义》中对加速踏板防误踩有着明确的定义,加速踏板防误踩(AMAP)是指在车辆起步或者低速行驶时,因为驾驶员误踩加速踏板产生紧急加速而可能与周围障碍物发生碰撞时,能够自动抑制车辆加速[7]。
1.1 功能实现
根据以上定义内容可以对AMAP系统的触发条件、工作环境以及采取措施等进行明确。触发条件:踩下加速踏板的加速度超过设定阈值以及存在与周围障碍物发生碰撞的风险。本文用加速踏板被踩下角度表征加速踏板开度(取0°~18°);相应地,加速踏板的加速度为踏板开度对时间二次求导,本文设定触发阈值为600°/s2。工作环境:城市客车起步或者低速行驶状态下,即一般情况实际车速在 0~40 km/h之间。采取措施:自动抑制车辆加速,避免车辆发生碰撞。
为了保证其功能的实现,系统需要根据采集到的相关数据通过合适的算法进行分析判断,并且对驾驶员的误操作进行修正。首先,系统应能够对感知范围内障碍物的状态以及与障碍物之间的距离进行实时监测更新,并且能够根据采集数据对预警时间以及制动阈值进行推算;其次,系统能够对自车加速情况进行识别,判断加速状态是否正常;此外,需要自动实现加速抑制以及有效制动。
1.2 结构方案
为了实现相应功能,系统由4个模块组成:感知、AMAP控制、执行机构控制和执行机构。纯电动客车AMAP系统结构组成架构如图1所示。
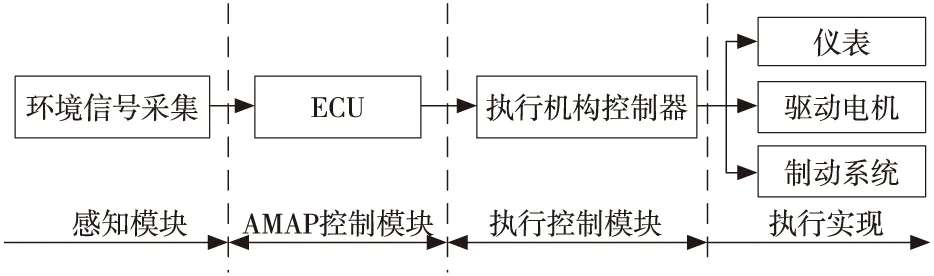
图1 纯电动客车AMAP系统结构方案
由于系统是在车辆起步及低速行驶阶段工作,车辆的最小安全距离较小,因此对传感器的远距离测距要求低。若从感知部件成本考虑,可以选择超声波雷达作为传感装置。超声波雷达具有对天气变化不敏感、成本低以及技术要求低的特点[8-9]。若从感知可靠性考虑,选择超声波雷达、毫米波雷达和摄像头融合的方案为佳,本文选用该融合方案。
图1中,AMAP系统触发抑制或者减速需求时,优先采用电机不动或反拖方式,来实现起步抑制或者减速;减速度需求大时再加入制动系统制动,制动系统主要通过EBS实现整车减速。客车EBS系统较传统气压制动性能提高约15%,并且能够便于精确控制[10-11]。
2 控制策略制定及验证
2.1 加速踏板误踩判定条件
误踩判定包含整车内部和外部两个方面,内部主要是加速踏板开度变化情况;外部主要是车辆与障碍物距离,即安全距离。
当车辆静止时,若前方安全距离内存在障碍物,则加速踏板只要有开度便认为是驾驶员误踩。当车辆运行时,若自车有碰撞危险,且加速踏板的加速度与正常情况下有着很明显的差异,则认为是加速踏板误踩的判断条件。
2.2 系统控制策略
AMAP功能实现的控制策略如图2所示。为避免将正常加速超车行为与误踩加速踏板相混淆,需进行冗余设计,将转向灯信号作为抑制信号,抑制防误踩系统的工作。当转向灯开启有正常转向信号时,认为驾驶员有超车意向,车辆将根据请求的加速信号进行正常的加速动作,即使加速踏板的加速度超过设定阈值,防误踩系统也不会工作。

图2 加速踏板防误踩控制策略
城市客车起步时,因车速较低以及驾驶员响应时间等不易明确会导致安全距离的计算不精确,因此选择以初始安全距离d(本文d=1.2 m)来执行相应的控制。
城市客车运行过程中,系统除了会根据与障碍物之间的碰撞时间进行预警之外,还会根据加速踏板的实际加速度进行踏板误踩的判定。当自车与障碍物碰撞时间进入设定安全范围内时,若出现加速踏板实际加速度超出设定阈值,且排除了正常加速超车的可能性,则系统将此时的踏板操作判定为误操作,会快速制动避免事故发生。
2.3 整车通讯
AMAP系统的主要控制元件为AMAP控制器。根据所制定的策略,控制器需要接收整车实时车速、与障碍物的距离、加速踏板状态(包括加速踏板的开度值以及基于开度和时间计算得出的加速踏板加速度值)以及转向信号,经过处理决策之后向相应的控制单元发出预警信号、电机扭矩控制以及制动控制的请求,如图3所示。

图3 AMAP控制器信号
系统从整车VCU处获得车辆速度和转向信号,并分别通过感知传感器数据融合以及踏板开度值获得车辆与障碍物的间距和加速踏板的加速度值。为避免系统制动与驱动之间的冲突,可以由整车VCU向EBS提出制动请求,EBS通过控制驱动电机扭矩和控制行车制动系统实现有效的制动。
2.4 实车验证
2.4.1 起步阶段误踩试验
测试车辆处于静止状态,在距车前方65 cm放置假人后踩下加速踏板。起步阶段只用超声波雷达数据,不涉及毫米波雷达和视觉摄像头。
由图4测试曲线可知,在车前方未放置假人时,超声波雷达未探测到障碍物,发送默认的508 cm。后续假人放置到位后,探测到障碍物假人与测试车的距离为66 cm,由于该数据小于整车设定的初始安全距离阈值d(1.2 m),此时加速踏板开度虽已有12.96°,但防误踩系统起作用,控制电机驱动扭矩为0,整车不起步。
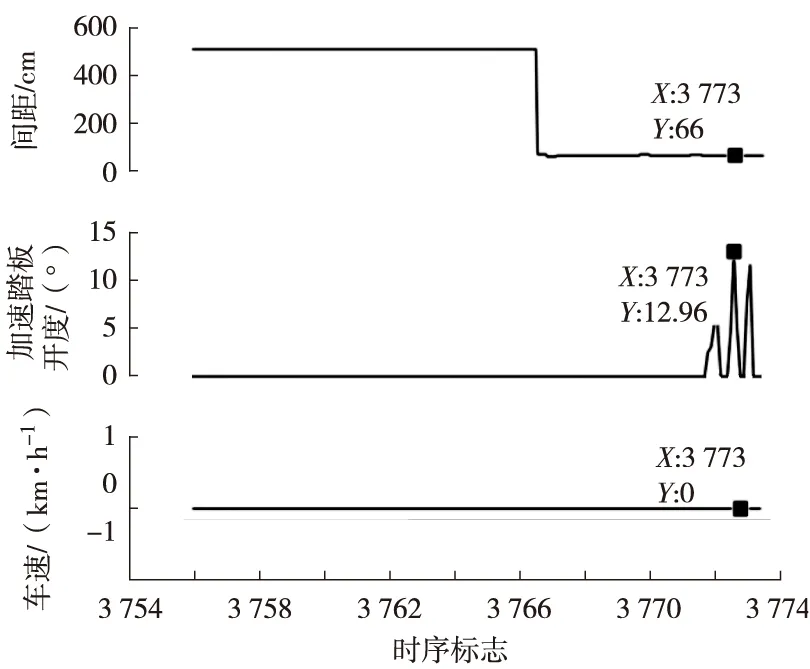
图4 起步误踩试验曲线
2.4.2 运行阶段误踩测试
为获得运行阶段误踩判断阈值,需要学习大量实车运营数据并得出加速踏板加速度和制动踏板加速度的规律,先选取正常行车过程中的加速和制动踏板加速度数据进行对比分析,如图5所示,发现正常情况下加速踏板开度加速度比制动踏板开度加速度要小得多,前者多在[0, 600°/s2]之间变化,而后者多在[0, 3 000°/s2]之间变化。因此选取加速踏板开度加速度>600°/s2为误踩判断阈值。
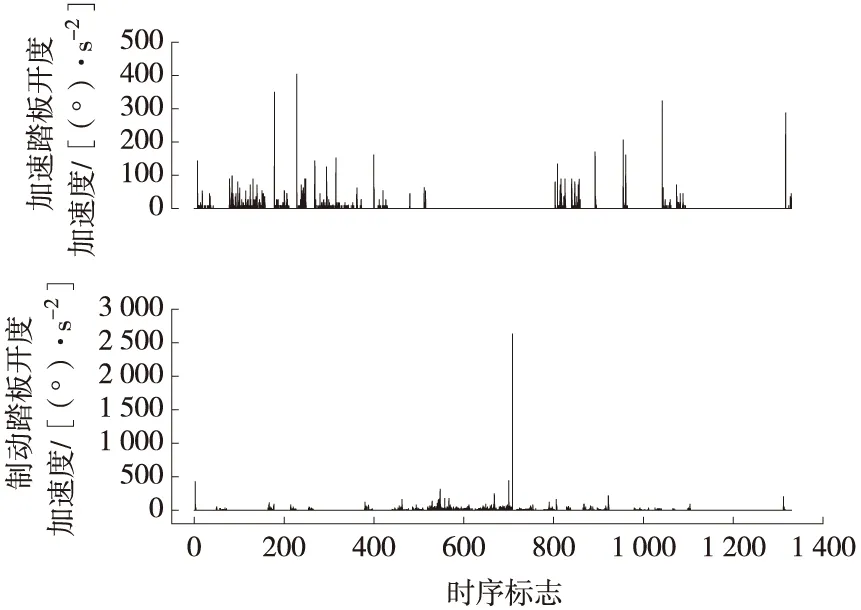
图5 加速和制动踏板加速度曲线对比
运行测试中,自车速度40 km/h,通过毫米波雷达和摄像头数据融合计算出与前车TTC小于3.5 s,加速踏板迅速踩到底后(此时加速踏板开度加速度752°/s2>600°/s2)AMAP系统工作,仅通过电机扭矩控制(因减速度较小)整车减速度从1.0 m/s2到1.5 m/s2,避免发生碰撞,整车车速和加速度变化曲线如图6所示。
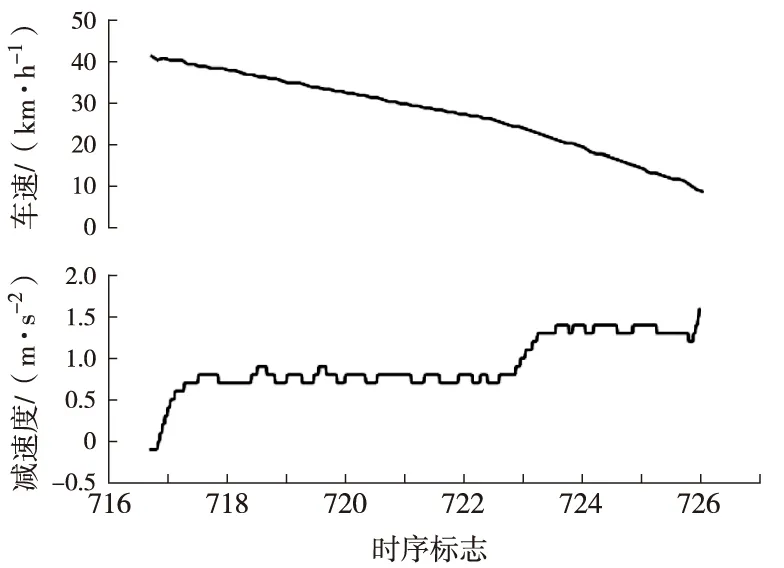
图6 运行误踩试验曲线
3 结束语
本文设计了一种加速踏板防误踩系统,并进行试验验证。针对城市客车(起步或者正常行驶)的不同状态,采用不同的加速踏板误踩判定方法,其中正常行驶状态下采用双因素决策进行判定,确保系统能够在恰当时机进行干预;并对起步与低速行驶状态采取不同的策略,以保证系统执行的可靠性。
