自适应巡航系统车间距控制策略
2021-12-24高晓祥王法龙
李 韧, 高晓祥, 王法龙, 吴 浩
(安徽安凯汽车股份有限公司, 合肥 230051)
自适应巡航车辆[1]跟车过程中,跟车距离对驾驶安全性和舒适性有影响,当目标前车频繁改变车速时,若跟车距离小,存在碰撞风险;若跟车距离大,容易被超车,且弯道容易丢失目标,行车效率低。合适的车间距可以提高ACC系统的安全性和舒适性[2-3]。
本文基于制动距离跟车策略[4]与车间时距跟车策略[5],提出一种汽车ACC跟车间距控制方法,低速跟车距离为固定车间时距,保证舒适性;高速跟车距离以制动距离为准,保证安全性。并通过实车验证跟车间距控制策略的合理性。
1 系统间距控制策略
1.1 跟车策略
系统间距控制策略,需考虑跟车安全性和舒适性。目前常用基于车间时距的跟车策略和基于制动距离的跟车策略,两种跟车策略的巡航速度确定原则相同,只是安全间距控制方式不一样,各有优缺点。
1.1.1 基于车间时距跟车策略
跟车过程中自车车速为μ,自车ACC设定的跟车时距为T时对应的距离dt=Tμ,基于车间时距跟车策略,其安全跟车距离dr为
dr=d0+dt
(1)
式中:d0为静止时两车应保持的安全距离,一般为5 m。
基于车间时距跟车策略的区域划分:
1)定速巡航区域:若前方无车或跟车距离d超过一定值(设为dmax)时,自车ACC采用定速(υ1)巡航行驶。dmax由自车感知传感器性能和控制策略共同决定。本试验车辆设定dmax为120 m,即当车距d大于120 m时ACC退出跟车状态,而转入定速巡航行驶。
2)制动区域:当跟车距离d小于dt时,自车ACC系统控制自车制动,并发出蜂鸣警告。
3)减速区域:当跟车距离d大于dt,且小于dr时,自车ACC系统控制自车减速,不发出蜂鸣声。
4)加速区域:当跟车距离d大于dr,且跟车距离小于dmax时,ACC系统控制自车加速,但速度不会超过v1。
跟车过程中,由式(1)确定的dr是自车ACC系统控制自车跟车的最终稳定目标距离。
1.1.2 基于制动距离跟车策略
当目标前车制动时,自车ACC系统控制自车主动制动。传统汽车的制动过程分为反应阶段、采取措施阶段、制动器空行程阶段、制动力增长阶段、最大制动力维持阶段,这5个阶段对应的时间分别为τ1、τ2、τ3、τ4、τ5。汽车制动距离[6]S为
(2)
式中:υ0为自车制动时车速;amax为最大制动加速度;υ1为制动力达到最大时的车速;υend为最终车速;k为制动过程制动力随时间τ4增长的斜率。
不同于传统汽车制动过程,ACC系统主动制动反应很快,因此τ1、τ2、τ3可以忽略不计;τ4也很小,其多次方数据也可忽略不计。但ACC系统采集、处理数据、执行操作有一定的延迟时间,设为τs。
首先根据式(2)计算自车制动距离。考虑极端状态,自车以最大制动减速度amax进行紧急制动使自车停止(自车υend=0),设自车初始车速υ0=μ,则自车制动总距离S1=μ(τ4+τs)+μ2/(2amax)。
目标前车制动过程无法确定,但可以考虑极端状况:目标前车以最大制动减速度a2进行紧急制动,其制动距离为S2,可根据式(2)进行相应计算。
如果目标前车发生碰撞或其他类似情况原地刹停,此时S2可以认为为0,此为极端状况中的极端情况。如果该极端情况自车都能够避免与目标前车相撞[7],则其他情况均能安全避撞。
通过自车制动距离S1与目标前车制动距离S2的差值l(l=S1-S2),可以计算出基于制动距离跟车策略的安全跟车距离da:
da=l+d0
(3)
式中:d0与1.1.1节相同。
基于制动距离跟车策略的区域划分原则与1.1.1节相同[8],只是将1.1.1节中的dr换为da,dt换为l。跟车过程中,由公式(3)确定的da是自车ACC基于制动距离跟车策略的目标跟车距离。
1.2 跟车策略特点及选定
两种策略的跟车距离d与自车速度μ的关系如图1所示。
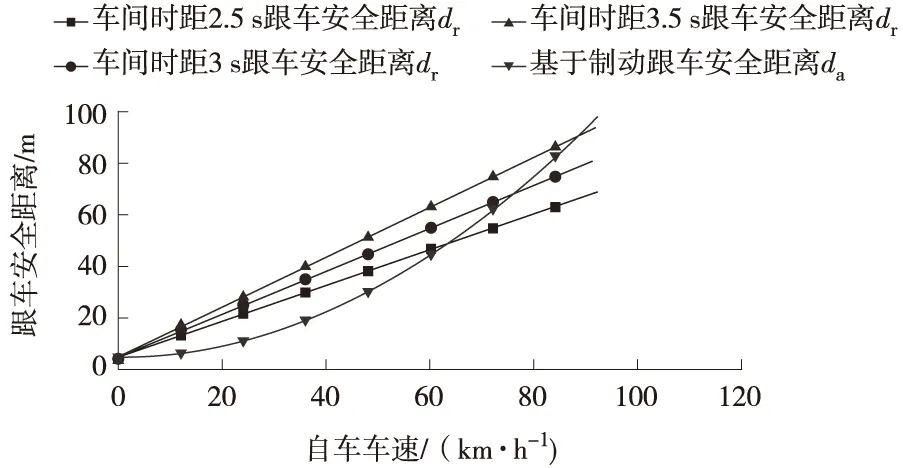
图1 跟车安全距离与自车速度关系曲线
分析图1,两种跟车策略的优缺点如下:
1)低速时,基于制动距离跟车策略计算的安全跟车距离小,低速跟车时距离近,容易触发制动,舒适性较差。
2)基于车间时距的跟车策略,没有将跟车距离与车辆制动关联,速度较快时,其跟车安全距离小于基于制动距离跟车策略,碰撞风险较大[9-10]。
针对长途客车和城市客车乘客较多,且有老人、小孩、孕妇等易受伤人群的情况,若跟车距离不够,自车可能采取紧急制动措施,易让乘客受伤。结合两种跟车策略的特点,本文提出一种基于车速的跟车策略,同时考虑到跟车的安全性和舒适性。即首先计算出式(1)和式(3)的交点,如图1所示,并设该交点处的跟车速度为υs,然后将此作为跟车策略的速度切换点,当自车车速小于υs时,跟车距离由车间时距策略确定,不同车间时距对应的交点位置不同;当车速大于υs时,跟车距离由制动距离策略确定。
本文自车ACC设定的跟车时距T=3 s,制动力增长阶段时间τ4与ACC延迟时间τs之和为0.5 s。下面计算两种跟车策略在图1中交点处的跟车速度υs。令式(1)和式(3)中的dr=da,并将dt的计算公式和l的极端情况算式代入后可得:
Tυs=υs(τ4+τs)+υs2/(2amax)
(4)
由后面1.3节可知amax可取3.5 m/s2,将已知参数代入方程得:υs=17.5 m/s=63 km/h。
因此该跟车策略设计如下:跟车策略的区域划分原则与1.1.1节相同,只是需将1.1.1节中的dr换为db,dt换为dc,但跟车过程中跟车安全距离的确定策略与车速相关:
1) 中低速跟车阶段。当自车跟车速度μ小于63 km/h时,由于基于制动距离跟车策略的跟车距离较小,跟车时容易触发紧急制动,所以选择基于跟车时距计算跟车距离,以保证舒适性,即通过式(1)计算其跟车安全距离,令db=dr,dc=dt。
2) 高速跟车阶段。当自车跟车速度μ大于63 km/h时,由于基于跟车时距计算的距离小于车辆实际制动距离,存在碰撞风险,所以选择基于制动距离跟车策略,以保证安全性,即通过式(3)计算其跟车安全距离,令db=da,dc=l。
1.3 最大制动减速度确定
考虑到跟车过程制动的舒适性,最大制动减速度amax应取合适值3.5 m/s2;且制动力增长和减小阶段不能突变,应按图2所示变化,其中制动力维持阶段t1~t2减速度大小由汽车ACC系统根据前车状况计算得到,最大值不超过3.5 m/s2。

图2 车辆制动阶段
2 试验验证
依据本文提出的基于车速的车间距控制策略,搭建车间距控制算法,将其融入整车控制策略中,并搭建试验车辆控制模型[11-13],如图3所示。按照试验车辆控制模型布置试验车辆,在试验中验证基于车速的车间距控制策略的可行性和有效性。
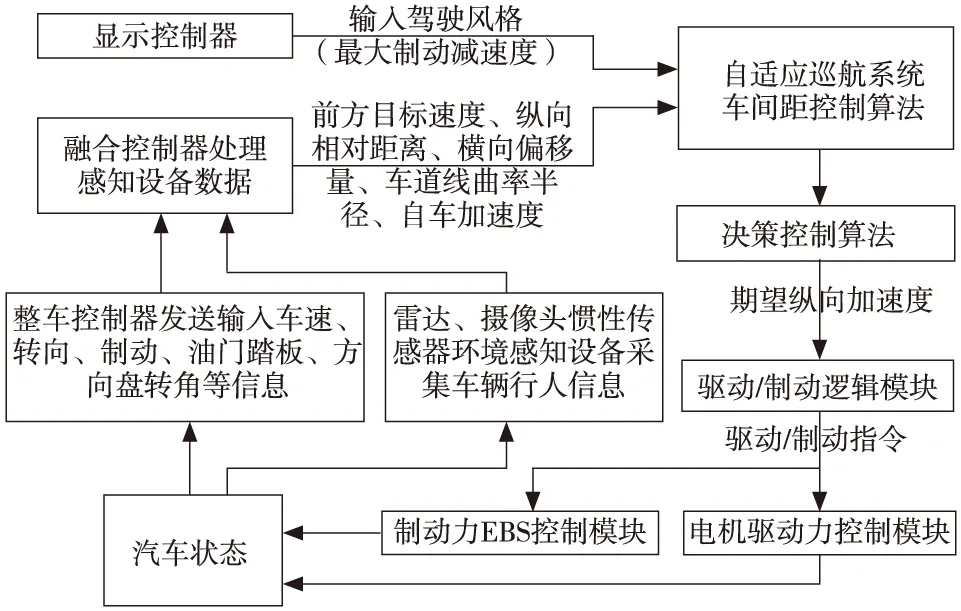
图3 试验车辆控制模型
试验时,自车为安装有ACC系统的客车;目标前车为试验专用假车,可通过专用设备控制其轨迹、速度、加速度等。试验开始前,自车与目标前车位于同一车道。目标前车加速至75 km/h,随后保持匀速行驶,自车驾驶员加速追赶前车,车速达到90 km/h时启动ACC系统,自车开始以90 km/h定速巡航行驶。当距离前车小于120 m时,ACC系统控制自车稳定跟随目标前车。随后目标前车减速至50 km/h,ACC系统控制自车减速至相同车速,稳定3 s后开始试验。整个试验过程中期望跟车安全距离和实际跟车安全距离随时间的变化情况如图4所示。

图4 跟车策略切换情况
1) 高速跟车区域:保持两车速度稳定在50 km/h,3 s后,目标前车突然加速直至75 km/h,使得自车跟车距离d增加,当d大于db且小于120 m时,ACC系统控制自车加速,跟车距离又逐渐减小,直至稳定到安全跟车距离db。此时自车车速μ稳定在75 km/h,大于63 km/h,自车ACC系统选择基于制动距离跟车策略,即通过式(3)计算其跟车安全距离,计算得跟车安全距离db=da=67.07 m,实际跟车距离为69.3 m,两者基本一致。
2) 中低速跟车区域:保持两车速度稳定在75 km/h,继续跟车3 s,随后目标前车采取制动,直至速度都降至63 km/h后,ACC系统切换为采用固定车间时距策略计算跟车安全距离(实测切换速度vs为62.7 km/h),目标前车继续制动,将车速降到50 km/h,此时自车ACC也跟着减速,最后稳定在50 km/h。跟车安全距离通过式(1)计算得db=dr=46.67 m,而实际跟车距离为 47.9 m,两者相差不大。
3) 制动区域:保持车速稳定在50 km/h,继续跟车3 s,随后目标前车采取紧急制动,当自车与目标前车间跟车距离d小于db=46.69 m,但大于dc=41.67 m,自车ACC系统控制自车也减速,此时不发出蜂鸣警告;前车继续紧急制动,当自车与目标前车间跟车的距离d小于dc=41.67 m时,ACC控制自车制动,并发出蜂鸣警告。最后目标前车和自车都制动至停车。两车停车时,自车与前车的距离为5.20 m,与设定的d0=5 m基本一致。本文跟车策略确定的跟车安全距离满足实际需求。
3 结束语
本文将车间距离控制算法同整车控制算法融合,实车试验表明,所提出的车间距离控制策略跟车距离适中,前车紧急制动时,自车能够避免碰撞,制动舒适性与安全性均满足要求。
