基于多点预瞄的车道保持辅助系统
2021-12-24欧阳智周艳辉杨杰君
欧阳智, 王 全, 周艳辉, 杨杰君
(长沙中车智驭新能源科技有限公司, 长沙 410083)
美国国家公路交通安全管理局统计结果表明,约20%的交通事故是车辆偏离本车道造成的[1]。车道保持辅助(Lane Keeping Assistance,LKA)系统不仅可以对驾驶员发出预警,还可以在驾驶员未干预时修正车辆的横向位置,使车辆重新回到原车道[2-3],进一步提高行驶安全性。
文献[4]基于跨道时间(Time to Line Crossing,TLC)判断LKA介入时机。该方法可以给驾驶员预留一定的反应时间,但是需要精准获取车辆的横向速度,存在一定的误判断、漏判断。文献[5-6]基于车辆二自由度模型对车辆的横向运动作出了预测,但过于依赖车辆动力学参数。文献[7-9]通过单点预瞄模型实现了车辆轨迹预测和车道线预测,但是单点预瞄存在随机性,无法准确表征车道偏差情况。
针对上述问题,本文提出一种基于多点预瞄的LKA控制方法。先基于跨道距离(Distance to Line Crossing,DLC)判断车道保持辅助介入时机;然后通过横摆角速度预测车辆横向运动;最后通过选取多个预瞄点设计横向位置控制算法,提高LKA控制稳定性。
1 LKA系统理论分析
1.1 系统架构
LKA系统可以分为感知层、决策层和执行层,如图1所示。

图1 系统架构图
感知层包括前视摄像头采集的车道线信息,以及VCU采集的车速、横摆角速度、挡位、转向灯等整车信息。决策层(即决策控制器)将感知层输入的车道线信息进行拟合和去抖处理,根据车速、横摆角速度等信息对车辆轨迹进行预测,当发生车道偏离且车辆状态允许LKA系统介入时,自动调节方向盘转角并下发给线控转向系统。执行层(即线控转向系统)响应决策控制器下发的方向盘转角命令,同时调整车辆的横向位置,使车辆维持在当前车道内行驶。
1.2 道路模型
前视摄像头输出的车道线感知信息为车道左/右线参数,如截距参数A0L/A0R、斜率参数A1L/A1R、曲率参数A2L/A2R、曲率变化率参数A3L/A3R等。以摄像头安装位置为坐标原点,预瞄距离为x,通过车道线实测数据和三次拟合方程[10]对车道左右线进行曲线拟合,可以获取车道左线、右线、中心线到坐标原点的横向距离yL、yR、y0:
yL=A3L·x3/6+A2L·x2/2+A1L·x+A0L
yR=A3R·x3/6+A2R·x2/2+A1R·x+A0R
y0=(yL+yR)/2
(1)
同时可以求得车道左线、右线、中心线上任意一点的曲率cL、cR、c0:
cL=A3L·x+A2L,cR=A3R·x+A2R
c0=(cL+cR)/2
(2)
1.3 车辆轨迹中心线模型
车辆质心处安装有横摆角传感器,实时检测车辆绕Z轴转动的横摆角速度W;车速V也可通过传感器获取。根据运动学方程,可以求得车辆任何时刻转弯瞬时半径R=V/W。已知预瞄距离x和转弯瞬时半径R,可以预测按照当前的行驶趋势车辆行驶至预瞄距离x处的横向距离y1。
根据几何关系可得,车辆左/右转时:
(3)
注:左转取“+”,右转取“-”。
1.4 预瞄点选取
驾驶过程中驾驶员观察到车辆前方一定距离处的道路状况,该观察距离与车速V和车道中心线曲率c0有关:车速越高,距离越大;道路曲率越大,距离越小。然后根据车辆中心线偏离前方道路中心线的横向偏差调整方向盘转角进行纠偏。上述观察距离称为预瞄距离。为了实现精准控制,LKA系统选取3个预瞄时间点,预瞄距离由预瞄时间和车速决定,并由车道中心线曲率修正,如图2所示。

图2 预瞄距离计算图
偏离距离Δy,即车辆运行轨迹中心线偏离车道中心线的距离,可以通过车道中心线横向距离y0和预测车辆行驶至预瞄点处横向距离y1计算得到,Δy=y1-y0。由于有3个预瞄距离x0、x1、x2,故可以计算得出3个偏离距离Δy0、Δy1、Δy2,用于表征不同预瞄距离处的车道偏离情况。但是将3个偏离距离作为误差输入调节方向盘转角不便于设计转角跟踪控制器,故需建立仲裁规则,从3个偏离距离中选取最能表征当前车道偏离情况的点作为误差输入。
仲裁规则见表1:偏离距离Δy≥0时,偏离距离符号为+;偏离距离Δy<0时,偏离距离符号为-。3个偏离距离Δy2≥Δy1≥Δy0时,偏离距离大小关系为单调递增;3个偏离距离Δy2<Δy1<Δy0时,偏离距离大小关系为单调递减;既不单调递增、也不单调递减时,偏离距离大小关系为不单调。

表1 预瞄点仲裁规则
1.5 车道偏离预判断
车道偏离判断是指通过视觉传感器探测车道线,结合车辆位置信息和状态信息得到车辆与车道线的相对位置关系,判断车辆是否会偏离当前车道。目前应用比较广泛的是基于TLC判断。该方法可以给驾驶员预留一定的反应时间,但是需要精准获取车辆的横向速度,实际应用中发现车辆横向速度存在较大的毛刺,会导致误判断、漏判断。
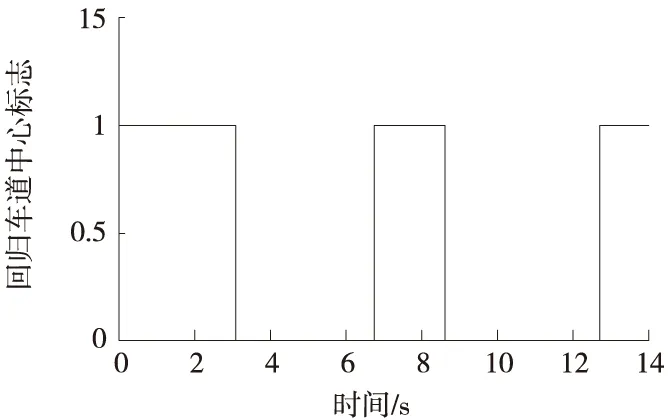
本文采用基于DLC判断,通过预留一定的横向距离Dset(此距离称为跨车道距离),可以在车身左侧边缘与车道左线或车身右侧边缘与车道右线横向距离 图3 车道偏离判断图 当偏离距离绝对值等于车道宽度的1/2与车身宽度Dveh的1/2之差时,车身边缘刚好压线。为了在车身边缘压线之前识别出车道偏离状态,本文引入跨车道距离Dset,偏离距离阈值Thd计算方法设计如下: Thd=(yL-yR)/2-Dveh/2-Dset (4) 其中yL、yR分别为车道左线、右线到坐标原点的横向距离。 横向位置控制是指根据车道线信息与预测的车辆位置信息对车辆进行横向位置控制,由基于车道中心线曲率的前馈控制和基于偏离距离的反馈控制组成,如图4所示。 图4 横向位置控制结构图 当车辆在曲线道路上行驶时,存在车辆轨迹中心线跟踪车道中心线的误差,且该误差跟车道中心线曲率相关,因此引入和车道中心线曲率相关的前馈控制以帮助消除此误差,保证系统在曲线工况下的稳定性,因此本文设计了式(5)用于车辆轨迹中心线前馈控制。 θf=Kf·i·(180/π)·arctan(L·c0) (5) 式中:θf为前馈控制转角;Kf为前馈控制系数;i为转向系统传动比;L为车辆轴距;c0为车道中心线曲率。 为将车辆轨迹中心线稳定地控制在车道中心线附近,需要将预测的车辆运行轨迹中心线偏离车道中心线的距离(即偏离距离)控制为0,因此本文设计了以偏离距离Δy为误差输入、反馈控制转角θb为输出的PI调节器式(6)。 (6) 式中:Kp为反馈控制比例系数;Ki为反馈控制积分系数。 式(5)、式(6)中的Kf、Kp、Ki根据车速进行调整。 转向系统包含多个机械零件,由于安装误差以及零部件松动会导致方向盘存在一个偏差角度,经过前馈控制和反馈控制调节的需求,转角需要抵消方向盘这一误差角度才能确保转向的精准。此外,方向盘转角转动过快可能会引发驾驶危险,故方向盘转角还需通过限制转角变化率进行平滑处理。 为充分验证LKA系统效果,选取一段封闭道路,驾驶员开车过程中双手离开方向盘,测试LKA系统的介入时机以及横向位置控制效果。测试结果如图5、图6和图7所示,分别模拟了一次车辆左偏场景和车辆右偏场景。当偏离距离过大且驾驶员无干预时,LKA系统及时介入,并控制方向盘逐步减小偏离距离,纠正了车辆运行轨迹,使车辆重新回到原行驶车道。 图5 偏离距离图 图6 回归车道中心标志图 图7 方向盘目标转角图 本文选取了多个预瞄点,并建立了预瞄点仲裁规则,精准预测车辆偏离车道中心线的横向距离;为横向位置控制输入了较能表征车道偏离情况的误差,提高了车道保持辅助系统稳定性。通过横向位置控制可以在发生车道偏离时修正车辆的横向位置,使车辆重新回到原车道中心线。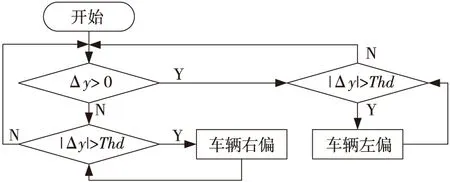
1.6 横向位置控制

2 实车测试


3 结束语
