基于极限学习机的驾驶员制动意图识别*
2021-11-25周恒平牛志刚
周恒平 牛志刚
(太原理工大学,山西 030024)
主题词:制动意图 再生制动 邻域成分分析 极限学习机
1 前言
电动汽车的再生制动是提高能量利用率的重要途径。据统计,城市工况中采用再生制动系统的车辆可降低约15%的能量消耗,提高10%~30%的续驶里程[1-2]。
再生制动控制策略中整车控制器(Vehicle Control Unit,VCU)根据传感器数据计算获得驾驶员制动意图,然后分配制动力并控制制动系统实现制动功能[3]。目前,基于制动踏板单参数的制动意图识别方法不能准确识别制动意图,从而影响了汽车的制动性能与能量回收[4]。赵伟强等利用制动踏板位移及其变化率,基于径向基函数(Radial Basis Function,RBF)的K 均值聚类算法建立驾驶员制动意图识别模型[5]。弓馨等选取制动踏板位移及其变化率,基于模糊逻辑建立期望减速度模型,再根据期望减速度、轮速及其方差等参数识别多工况驾驶员制动意图[6]。张文波等综合分析驾驶员制动过程与道路环境,设计了基于伪二维连续隐马尔可夫模型的制动意图识别方案[7]。李晓东等提出了基于支持向量机(Support Vector Machines,SVM)的驾驶意图识别方法,通过自适应粒子群算法提高了模型的预测能力[8]。
制动意图识别是整个制动系统控制中的重要一环,上述方法在意图识别过程中可以达到90%以上的准确率,但识别速度仍有待提高。为了进一步准确、实时地识别驾驶员制动意图,本文基于邻域成分分析(Neighborhood Components Analysis,NCA)和极限学习机(Extreme Learning Machine,ELM)算法建立多参数电动汽车驾驶员制动意图识别模型,并对模型进行优化。
2 制动意图特征参数选择
2.1 特征参数分析
制动意图是指驾驶员操纵车辆减速或停车的驾驶意图[9]。根据道路及行驶状况和驾驶员操作特性的不同,制动意图可以分为缓慢制动、中等制动和紧急制动3类。缓慢制动也称为调节制动,中等制动也称为目标制动。当汽车处于不同的行车环境时,驾驶员会作出判断并产生相应的行为反应。表1 列出了不同制动意图对应的详细工况特征和制动行为。
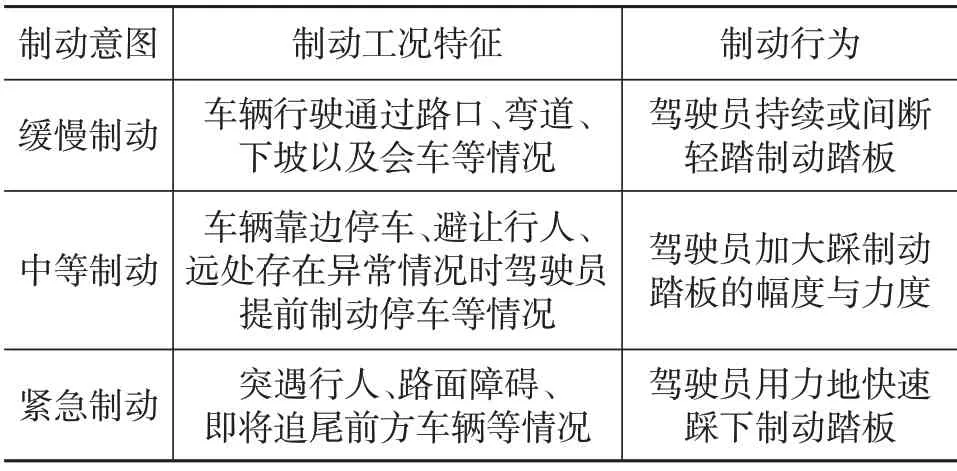
表1 制动意图特征描述
目前,相关研究大多选取制动踏板开度及其变化率2个参数来识别制动意图,在是否为紧急制动的识别中有较好的效果,但在驾驶员缓慢制动与中等制动上的效果并不明显。实际上,制动踏板位移及其变化率、制动踏板力和制动管路压力等参数都可以直接反映驾驶员对车辆的操作,并且容易通过各种传感器获取相关的信号数据。
文献[10]研究表明,制动踏板位移不受驾驶员习惯影响,是能够反映驾驶员制动意图的最佳识别特征参数。制动踏板位移变化率具有一定随机性,而制动踏板力和制动管路压力受系统结构影响,都会导致识别结果不够准确。
通过整车制动试验分别采集缓慢制动、中等制动、紧急制动意图下4 个制动特征的数据。对于试验采集的信号,传感器等器件在工作中会产生一定的随机脉冲干扰,这些干扰信号会混入制动意图输入信号中,影响驾驶员制动意图识别结果,因此,本文采用移动平均滤波法对采集的信号数据进行预处理。移动平均滤波算法是一种降低随机干扰误差,平滑采集数据的滤波算法,通过移动采样窗口求均值,最终过滤掉高频的信号数据。将信号滤波预处理后,选取3 种制动意图下150组包括制动踏板位移及其变化率、制动踏板力和制动管路压力测量值作为样本数据,通过数据分析求解每种特征参数在系统中所占的权重,选出建立模型使用的识别参数。
2.2 邻域成分分析原理及算法
NCA 是一种非参数的、嵌入的特征选择方法,目的是最大限度地提高回归和分类算法的预测精度[11]。考虑一个数据集合为S的制动意图分类问题:

式中,xt为第t组特征数据;yt为第t组数据对应的意图类别;p为集合中数据总数量。
从S中随机选取一个点xref作为样本点x的近邻参考点。令点xt到x的距离函数为:

式中,wr为数据组中第r个参数的特征权重。
则选取点xt作为随机参考点的概率为:

式中,k为距离系数。
设集合中第t个样本的选出概率为Pt,则正确分类样本的平均概率为:

式中,λ为正则化参数。
最后,通过引入λ将提高平均概率F的问题转变为寻找产生最小分类损失的λ。交叉验证的算法步骤为:
a.将制动样本数据分为5份,其中4/5的数据指定为训练集,其余的数据指定为测试集。
b.使用训练集为每个λ取值训练邻域分量分析模型。
c.通过NCA模型计算相应测试集的分类损失,并记录损失值。
d.重复以上步骤,最终找到最佳的λ取值,计算出对应的特征权重。
本文设定NCA 算法的步长为1/q,其中q=135 为训练数据数量,然后计算特征参数的权重,选取其中比重较大的参数用于建立模型识别制动意图。经过模型的计算,制动踏板位移及其变化率在4个参数中占有较大的权重,符合前文对制动意图特征参数选取的分析。另外,制动踏板力相较于制动管路压力在意图分类中更具识别性。
制动踏板位移及其变化率能够更准确地反映驾驶员的制动意图。同时,选取制动踏板力参数通过力与位移2 种不同类型的传感器结合使用,能够避免共因失效,提高制动意图识别系统的可靠性。综上,本文最终选取制动踏板位移及其变化率和制动踏板力3 个特征参数。
3 制动意图识别模型建立
3.1 极限学习机原理及算法
ELM 是基于穆尔-彭罗斯(Moore-Penrose)逆矩阵的一种具有设置参数少、收敛速度快等优势的学习算法[12]。传统的学习算法需要通过不断迭代计算、调整参数来优化结构,ELM 的本质是根据随机特征映射线性的求解过程,可以极大地降低算法的复杂程度,提高学习速率。
ELM神经网络结构如图1所示,假设有任意的数据样本(Xt,Yt),其中Xt=[xt,1xt,2…xt,m]T∈Rm为输入的特征参数,Yt=[yt,1yt,2…yt,n]T∈Rn为对应的意图识别结果。基于ELM的识别模型输出可以表示为:
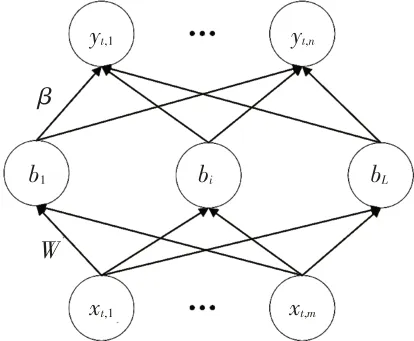
图1 ELM神经网络结构

式中,Wi、βi分别为第i个隐层神经元的输入权重和输出权重;bi为第i个隐层神经元的偏置;g()为激活函数;L为模型隐层节点数量;N为样本数量;oj为第j个样本对应的模型输出。
ELM 通过对应识别模型的目标tj训练网络得到最小的输出误差:

即存在βi、Wi和bi使得:

简化后可表示为Hβ=T,其中H为隐含层的输出矩阵,β为输出权重,T为模型的期望输出结果。
3.2 模型建立及优化
基于ELM 算法构建驾驶员制动意图识别模型,选定隐层节点数量为20 个,并选取激活函数Sigmoid,表达式为:

一般的ELM算法的输入权值与隐层偏置由系统随机生成,同时考虑到输入数据存在随机噪声,在识别模型计算最小误差时存在一定的不稳定性[13]。本文在求解制动意图模型输出权重中引入加权最小二乘法优化神经网络的计算过程。最小二乘估计(Least Square Estimation,LSE)是常用的回归统计方法,根据回归残差求解模型的输出权重。残差ei的目标函数可表示为:

式中,ρ()为影响函数。
输出权重可由加权最小二乘法确定[14]:

式中,W为隐含层的输入权重。
4 模型验证及数据分析
4.1 数据归一化
从各种制动意图中随机选取90组包括制动踏板位移、制动踏板位移变化率和制动踏板力的数据进行制动意图的仿真测试,表2列出了部分特征参数数据。
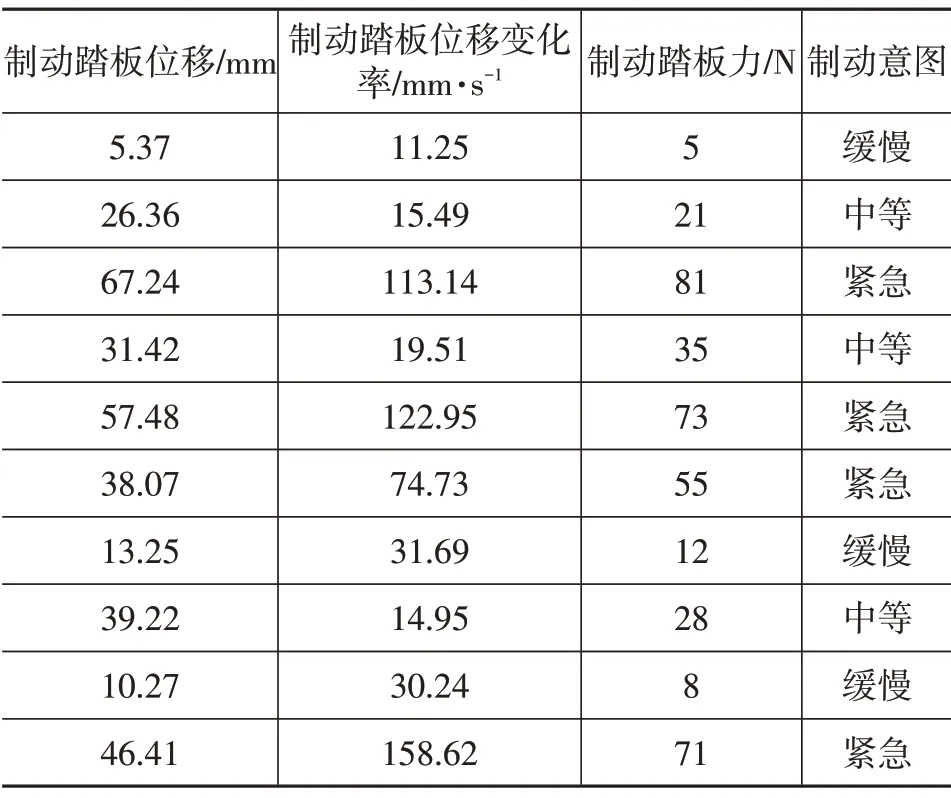
表2 部分制动特征参数数据
根据识别模型的要求,神经网络输入和输出的节点数量可能不止1个,多个节点导致数据的量纲和数量级可能会有所差别[15],使训练好的神经网络对于新的样本数据识别结果的准确度难以保证。因此,需要先对各节点的数据进行归一化处理,然后验证制动意图识别模型的识别能力。
4.2 离线验证分析
将验证数据导入训练后的识别模型中,首先,神经网络会根据输入参数随机确定输入权重矩阵W和隐层的偏置矩阵B,然后求解输出神经元的权重并预测输出结果,最后,对比实际意图得到如图2 所示的结果。其中制动意图取1、2、3分别代表缓慢制动、中等制动和紧急制动。

图2 测试集预测结果
模型的测试结果如表3所示。3种制动意图各选取30 组数据,只有4 组识别错误,驾驶员制动意图的识别准确率达到95.56%。

表3 离线模型验证结果 组
然后向算法中添加时间函数,求得识别时间为0.18 s。表4列出了几种制动意图识别方法的平均耗时情况。综合分析数据结果,ELM算法收敛速度快,误差小,即需要较少的迭代次数即可达到模型所需要的精度要求。
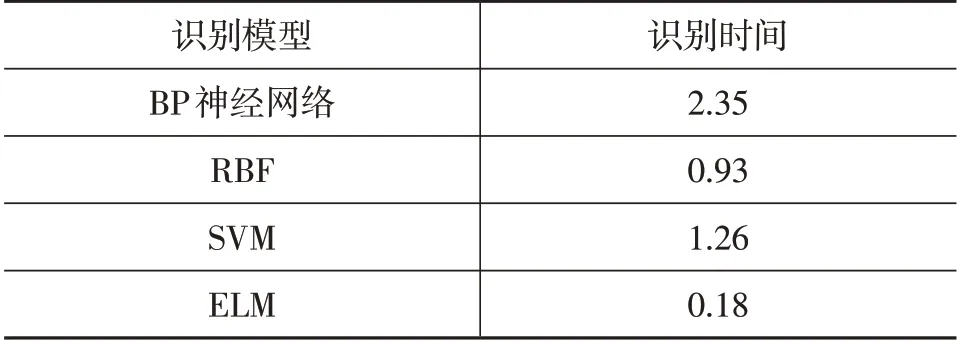
表4 模型识别时间 s
4.3 在线验证分析
dSPACE 实时仿真系统具有很好的实时性与可靠性,采用基于dSPACE的驾驶试验台在线验证制动意图识别模型的实时识别效果。选择一名普通的驾驶员在驾驶模拟器中,按照要求进行6次制动试验(缓慢制动、中等制动和紧急制动各2 次),通过MATLAB/dSPACE平台采集的制动踏板滤波处理信号以及制动意图在线识别结果如图3所示。由图3可知,模型正确地在线识别出了全部的制动意图。制动能量回收主要集中在中小制动强度阶段,紧急制动过程由于再生制动力不能满足车辆的制动安全性要求而无法回收能量[16],因此准确地识别出制动意图对于制动能量回收具有重要的意义。

图3 制动意图在线验证结果
制动意图在线验证响应结果如图4所示。从图4中可以看出,第9.7 s时系统识别到制动踏板信号,第9.9 s时识别出缓慢制动意图,即意图在线识别时间为0.2 s。一般地,汽车制动过程中制动器作用时间为0.2~0.9 s,模型的识别响应时间满足制动安全性的要求。
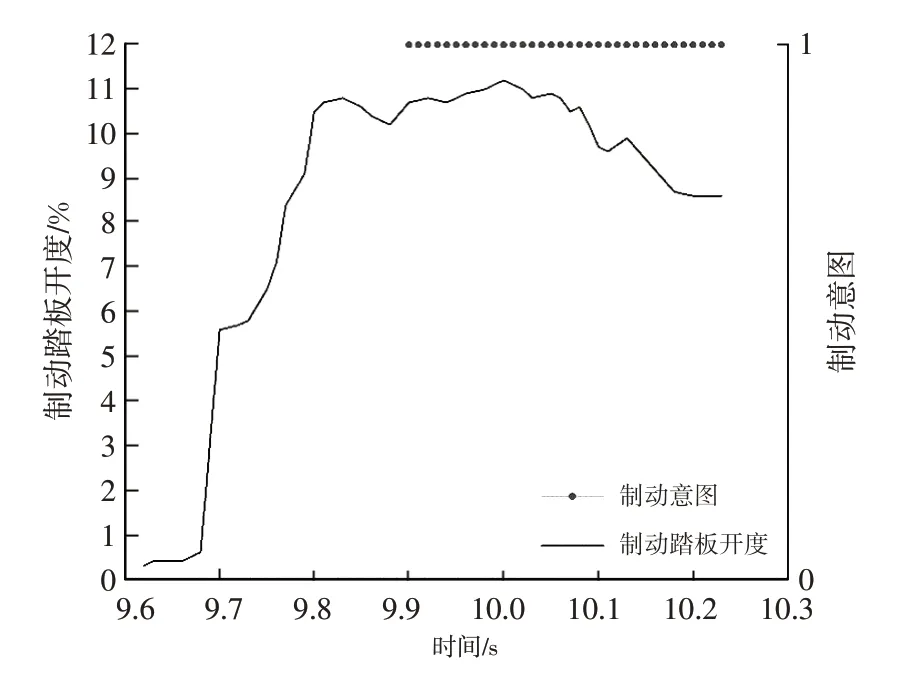
图4 制动意图在线验证响应
5 结束语
本文提出了一种基于邻域成分分析与极限学习机算法的制动意图分类与识别方法。通过对制动相关的特征参数进行邻域成分分析,选取制动踏板位移及其变化率和制动踏板力3 个特征参数建立多参数制动意图识别模型。基于极限学习机理论建立并优化驾驶员制动意图识别模型,验证结果表明,模型识别准确率达到95.56%,响应时间为0.2 s,在制动意图,尤其是缓慢制动与中等制动之间的意图识别准确率和实时性方面有了进一步提升。
未来的研究中可以结合汽车行驶工况与驾驶环境对制动意图进行相应细分,同时利用车速和制动管路压力等信息增设冗余控制,完善制动意图识别模型,进而提高车辆的驾驶性及经济性。
