露天铁矿无人机光谱探测方法试验研究
2021-05-10祁玉馨刘善军孙铭辰2
祁玉馨 刘善军 王 东 孙铭辰2
(1.东北大学资源与土木工程学院,辽宁 沈阳 110819;2.鞍钢集团鞍千矿业有限责任公司,辽宁 鞍山 114043)
铁矿是支撑国民经济发展的主要矿产资源之一,是发展钢铁工业的物质基础,由于矿产资源的紧缺性及不可再生性,如何做到合理、高效、精准开采铁矿资源已成为亟待解决的问题[1-3]。露天采矿工程是一种大规模的开挖工程,岩石与矿体分布的确定是露天矿生产规划的第一步,因此明确露天采场中矿物与岩石的分布并精确提取该类信息对后续开采规划尤为重要[4]。但传统的矿岩识别方法(如矿山采样、化学化验等)耗费较大的人力物力且效率不高,已无法满足露天采场的生产需求[5]。高光谱遥感其光谱分辨率可达到纳米级,进而能够捕捉到不同岩石与矿物的诊断性光谱特征,使利用宏观技术(高光谱遥感)进行微观信息(岩石与矿物)探测成为可能[6]。岩矿分布信息提取及定量反演是高光谱遥感地质应用的重要方向,目前多采用矿物光谱填图、主成分变换、基于光谱特征提取的波段比值等方法提取蚀变矿物信息,已取得了很大进展[7]。成像光谱技术的发展极大地促进了地质找矿方法的完善,提高了识别的精度[8]。但混合像元的存在是传统的岩矿分布识别方法难以达到实用要求的主要原因[9]。混合像元分解技术是解译像元的重要手段,可从混合像元中分解出所需的岩石、矿物信息,实现对岩石与矿物的精确识别和定量反演[10]。
目前,随着现代信息技术、人工智能、大数据等新技术的不断涌现和快速发展,传统的矿山正在向无人采矿、智能采矿和智慧矿山迈进和发展,其中必备的两项技术“现代通讯技术、采掘自动化技术”已经实现或部分实现,而与其同等重要的第3种技术——矿岩智能感知技术则发展缓慢,亟待突破[11-14]。本研究选取鞍钢集团下属的露天采场为试验场,研究基于无人机成像光谱的露天铁矿探测技术,为露天采矿的矿岩分布及边界确定提供一种新的技术,也为实现露天无人采矿的矿岩智能感知提供新的思路。
1 混合像元分解
1.1 线性光谱混合模型
在实际利用遥感技术进行地物识别时,图像中像元对应的往往不是纯净的单一地物,而是由不同的地物共同聚集构成,使得获得的光谱信息也是几种地物的混合光谱信息。在利用光谱特征进行地物识别时,需要将混合的光谱信息进行分解,也被称为混合像元分解。线性光谱混合模型(Linear Spectral Mixture Model,LSMM)认为像元在某一波段的反射率是组成该像元的基本组分(端元)及其所占面积比例(丰度)为权重系数的线性组合。该模型因具有扎实的理论基础及实验验证,且简单实用,故被广泛应用于混合像元分解中[15]。该模型函数为

式中,yi为混合像元i波段的反射率;aij为第i个波段第j个端元组分的反射率;xj为第j个端元组分的丰度;ei为第i个波段的误差。
将式(1)表示为矩阵形式

式中,YL×N为图像矩阵;AL×P为端元矩阵;XP×N为丰度矩阵;EL×N为误差矩阵;L为波段数;P为端元数;N为图像中包含的像元数。
由于丰度表示端元在混合像元中所占的比例,因此应满足“非负”与“和为一”两个特性,即:

1.2 全约束最小二乘法求解丰度
在已知端元光谱后,丰度反演的精度对于解混结果有重要影响。因此在传统的最小二乘算法中加入丰度约束[16],其原理简单,运算效率及精度较高,且适用性强,是目前应用最为广泛的丰度反演方法。根据丰度约束条件的程度该算法可以分为4种,即无约束最小二乘法、和为一最小二乘法、非负最小二乘法和全约束最小二乘法[17]。
当不考虑对丰度的约束时,可得无约束解为

式中,YL×N为图像矩阵;AL×P为端元矩阵。
考虑到和为一约束时,可以得出和为一的约束解为

式中,Ip为p阶单位矩阵;I=[I,I,.…,I]T为全 1(p维)列向量。
而非负约束解不能由简单的算子表示出来,需要利用迭代方法获得最优解。非负约束最小二乘法的两个迭代关系式为

同时满足“非负”和“和为一”约束的解称为全约束最小二乘解,将(5)代入(6)即可求解得到。
由于全约束最小二乘丰度反演法全面考虑到了端元丰度的实际意义,因此求解精度最优,本研究应用该方法求解丰度。
2 现场试验
2.1 研究区概况
哑巴岭露天采场是鞍钢集团矿石原料的重要生产地,位于辽宁省鞍山市。矿石类型为典型的鞍山式铁矿,主要为赤铁矿,多为贫铁矿,铁品位多位于20%~35%区间,围岩主要有千枚岩、绿泥石片岩、斜长角闪岩、混合花岗岩、云母片岩。
2.2 数据采集及预处理
目前多数遥感地质的研究数据主要来自卫星平台[18]。近年来无人机高光谱技术逐渐趋于成熟与完善,与其他传感器平台相比,无人机操作简单、航线及飞行高度可调整、数据获取方式便捷[19]。并且,由于无人机遥感探测高度低,空间分辨率较高使得地物识别精度大幅提高,适合于小面积矿区的地面调查。且由于数据获取周期短,保障了采场监测数据获取的灵活性与时效性[20]。
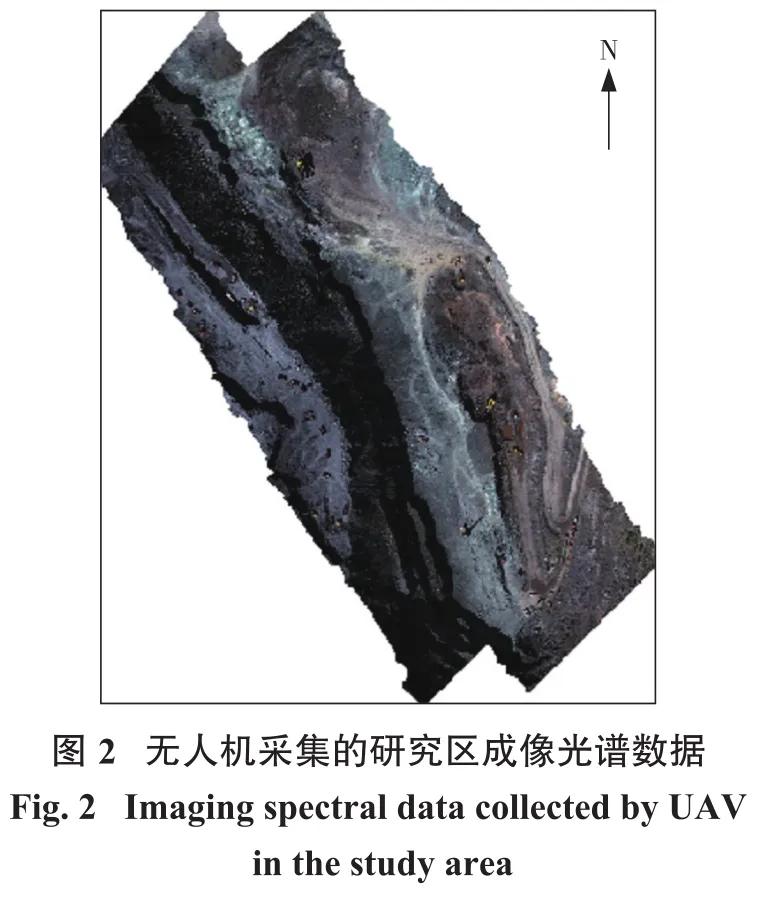
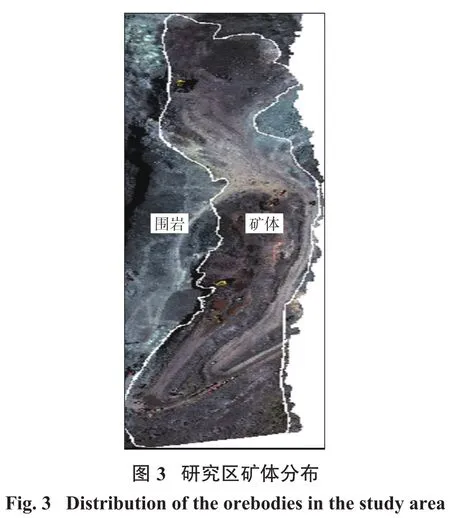
因此,本研究利用大疆经纬M600 pro无人机搭载的RESONSON高光谱成像仪PIka L(图1)进行采场遥感数据采集,该设备的光谱范围为400~1 000 nm,光谱分辨率为2.1 nm,采样间隔为1.07 nm。对无人机采集的高光谱影像进行大气校正以及影像校正、图像拼接等一系列预处理。由于900~1 000 nm波段噪声较为严重,掩盖了地物自身的光谱信息,因此本研究剔除了该波段的光谱信息,得到0.5 m空间分辨率和245波段的高光谱影像,如图2所示。对采集的整幅影像进行裁剪处理,得到目标研究区域如图3所示。图3中的白线为矿山地质部门根据室内化验结果标出的矿体分布边界,白线圈定区域为矿体,周围区域为围岩。

2.3 矿岩遥感识别与矿体圈定
本研究应用混合像元分解方法对露天采场进行矿岩分布识别提取。由于矿体和围岩的矿物种类多、复杂,且颗粒度较小,使用矿物种类作为端元处理流程比较复杂。矿体中的矿石类型主要为赤铁矿,品位比较集中(30%左右),且近矿围岩主要为千枚岩。因此,为简化流程,将赤铁矿作为矿体中的端元,千枚岩作为围岩的端元,此外在采区还存在少量积水、车辆和阴影地物。最终选择5种地物作为混合像元分解的端元,分别是赤铁矿、千枚岩、积水、车辆和阴影。
应用ENVI软件在目标研究区的影像上建立感兴趣区ROI,提取各种端元地物的反射率光谱曲线作为端元光谱,这种手工选取端元光谱的方法准确可靠且简单快速,但需要操作者对研究区具有较高的认识水平[21]。5种端元的光谱曲线如图4所示,根据对比可发现,围岩与矿体的光谱曲线具有一定差异,千枚岩在400~900 nm波段范围内无明显的光谱特征,反射率值均较低,且分布集中,多位于0.10~0.15区间。由于Fe3+的电子跃升,矿体的光谱在750 nm(红光波段)附近形成了一个微弱的反射峰特征。车辆的整体反射率较高,阴影的反射率较低且平缓,积水在可见光波段600 nm之前,水的吸收少,反射率较低,在700 nm处达到一个峰值。因此混合像元分解技术可基于不同端元的光谱差异将其进行有效区分。

本研究基于MATLAB编程实现了全约束最小二乘算法运算,将研究区影像及5种端元光谱作为输入数据,试验结果如图5所示,依次为矿体、围岩、阴影、积水、车辆的丰度图。

将图5(a)与图3进行对比,发现应用混合像元分解技术提取的矿体与室内化验圈定的矿体分布基本一致。但图3中人工圈定的矿岩界线分明,而使用混合像元分解技术圈定的矿体界线比较模糊,但这在一定程度上可能反映了真实的矿体分布情况。为定量评价提取出的矿体分布精度,本研究将两种方法提取的结果进行了对比。基于线性混合模型原理,使用矿体对应的丰度信息,按照下式计算其在露天采场中的分布面积。

式中,Xi为第i个像元中矿物的丰度;R为图像的空间分辨率m;n为像元总数;S为采场中某种矿物的分布面积,m2。
经过式(7)计算得出,本研究试验提取的矿体分布面积为62 365.47 m2,图3中矿体圈定面积为67 859.25 m2,面积相对精度为91.90%,提取结果较为理想。
3 结 论
(1)目前采场矿岩识别方法以传统的化验方法为主,存在采样密度低、化验周期长、效率低、品位测试结果滞后等不足,导致矿体边界圈定不准,严重影响了后续生产。应用混合像元分解技术,利用无人机采集研究区的成像光谱数据,研究了露天铁矿采场中矿岩识别与自动提取方法。现场试验结果表明,基于无人机高光谱技术的露天铁矿圈定技术可对铁矿体进行有效圈定,与现有的室内化验圈定的矿体面积相比,精度较高,为实现矿岩智能感知提供了新的方法。
(2)本研究基于高光谱遥感技术只进行了矿岩识别分析,后续将进行矿石品位的反演研究。
致 谢
感谢鞍钢集团鞍千矿业有限责任公司的相关技术人员对课题组研究给予的支持与合作。
