腰椎神经微创机器人柔性进针控制技术设计
2021-05-06孙椰望刘宇行孙松涛曹也罗扉蒋建虎曹安林刘玉柱罗晓华
孙椰望,刘宇行,孙松涛,曹也,罗扉,蒋建虎,曹安林,刘玉柱,罗晓华
(1.中国科学院理化技术研究所;2.洛阳理工学院;3.中国人民解放军32368部队;4.北京理工大学,北京 100000)
腰椎间盘突出、神经粘连等患者,多见于60岁以上老年人群。针对药物无法治疗的腰椎退行性疾病患者,微创神经外科手术机器人可在狭小的空间完成复杂的手术,达到手术的创伤性最小化、微创准确性最大化,成为骨科临床的迫切需求。但是,在国内,由于神经微创手术机器人系统的研发刚刚起步,现阶段国内神经微创以刚体结构手持微创装置治疗为主,很难实现路径变动,CT介入的人机协同一次准确微创不足40%,自动导航和变路径精准微创的手术技术十分缺乏[1-5]。
针对周围神经疾病以及囊肿微创、癌症微病变体等诸多神经疾病的毫米亚毫米尺度微创及柔性变路径精准微创治疗难题[6,7],荷兰TUD Paul团队引领国际技术前沿,率先实现了毫米亚毫米尺度机械柔性微创医工技术的临床应用,但是没有进行智能技术的研发[8,9]。本课题组所属中科院团队利用优势资源互补的方式,组建了世界领先的精密智能柔性微创医工技术团队,并联合北京301医院、国家微细制造创新中心及荷兰TUD DEMO医工中心,研发了国际首套腰椎神经区位微创的直径1.6mm的超自由度毫米尺度智能微创机器人系统,并且融合了亚毫米嵌入式视觉定位系统[10,11]。本文基于团队完成的毫米级智能柔性机器人样机系统,进行控制系统的分析研究。
1 神经微创机器人控制逻辑
1.1 神经微创医疗机器人系统控制流程
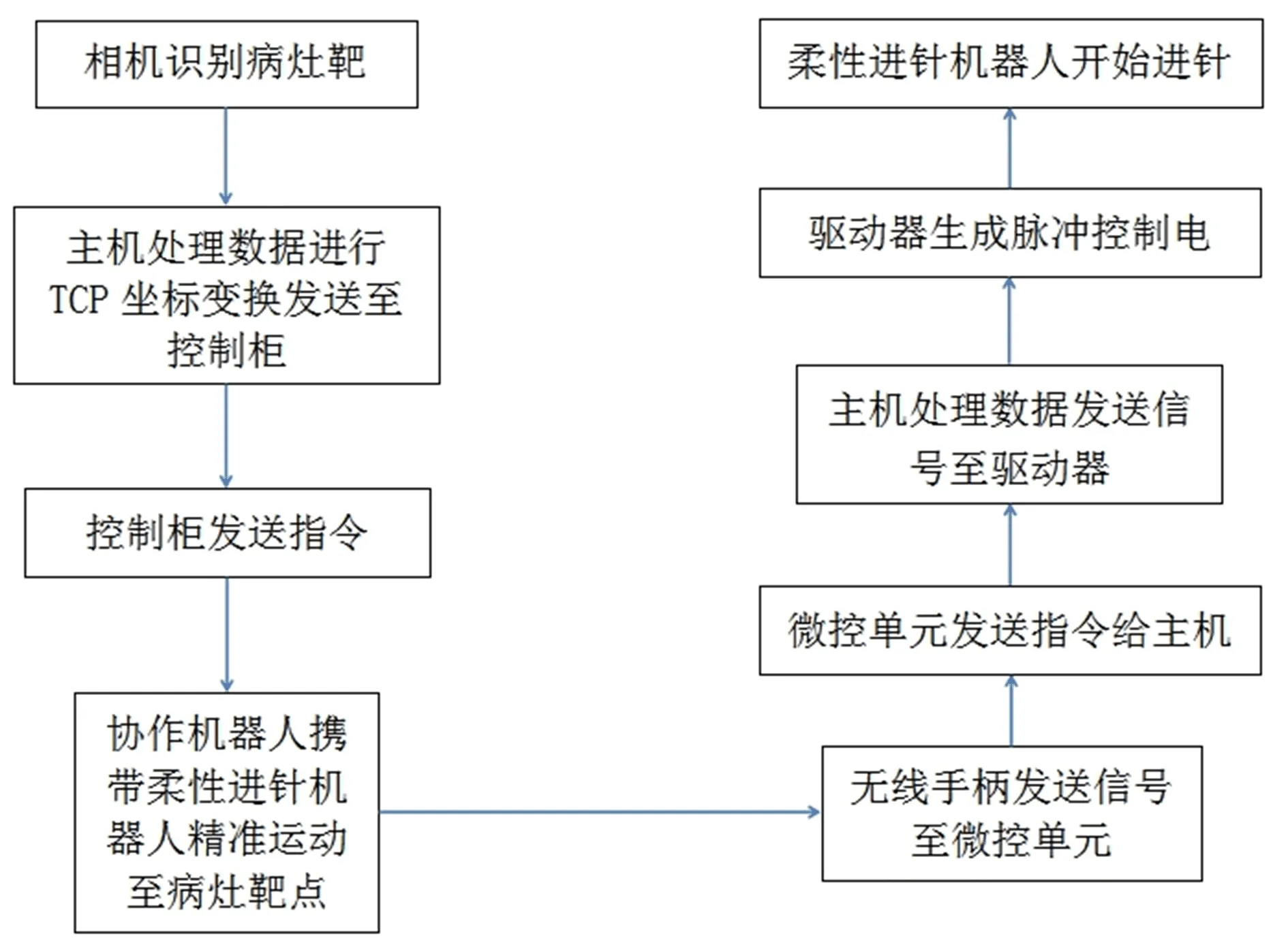
图1 机器人系统控制流程图
如图1所示,神经微创机器人术前需要相机、主机、控制柜等设备运算确定病灶靶点坐标,微创协作机器人经TCP坐标变换后,将携带柔性进针机器人精准运动至病灶靶点,此后即可进行后续手术。进行后续手术时,医务人员可操作无线手柄给微控单元发送指令,指令经微控单元处理后发送给主机,主机进行最终处理运算、发送信号给控制柜和驱动器,并生成坐标信息和脉冲信号,进而实现辅助医疗机械臂与柔性进针机器人耦合控制,完成精准进针动作。
1.2 整体系统逻辑
如图2所示,神经微创机器人系统整体可分为2层单元板块,上层单元板块包括主机及其显示系统,用以接收下层微控单元发送的指令,显示微创手术实时影像,并发送指令控制柔性进针机器人和协作机器人;下层单元板块包括STM32F103ZET6微控单元、LM2596S直流可调降压稳压电源模块、步进电机、无线手柄和无线接收器。
1.2.1 上层运算单元
如图2所示,相机用以识别微创手术病灶靶点并获取微创手术的实时影像上传至主机;进针机器人驱动器通过网线与主机获得通信;主机上装配了技术手段非常成熟的Windows操作系统,其功能包括获取所述相机传输的实时影像,运行进针机器人驱动软件并发送指令给进针机器人驱动器,接收并处理下层控制单元发送的指令,将所述全部信息通过VGA线缆传送给显示器,用以更好地进行人机交互,方便医务人员了解微创手术的进行程度,便于实时控制微创过程。
1.2.2 下层控制单元
如图2所示,无线接收器用以接收无线手柄发送的信息并传输至STM32F103ZET6微控单元进行运算处理;图中控制柜通过线缆直连方式获取STM32F103ZET6微控单元发送的指令,进而控制协作机器人;STM32F103ZET6微控单元接收无线接收器反馈的数据进行处理后,通过串口通信方式发送指令至上层单元中的主机部分。
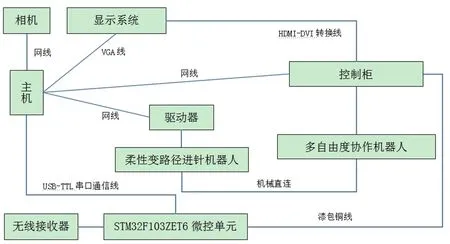
图2 医疗机器人系统逻辑图
2 神经微创机器人控制方案设计
针对神经微创机器人的手术前端毫米级柔性精准微创的技术难题,根据神经微创医疗机器人术中灵活性、稳定性、精准性和可靠性的需求,基于上述逻辑思路,课题组设计了协作机器人与毫米级线控机器人耦合控制进行柔性变路径精准进针的控制方案。
如图3,柔性变路径智能微创机器人结构及控制示意图中,机器人主要由柔性针(11)、第一步进电机(6)、第二步进电机(7)和第三步进电机(13)组成。该装置通过对第一步进电机与第二步进电机的精准脉冲控制,实现柔性针弯曲过程;通过对第三步进电机与多自由度机械臂耦合控制,实现精准进针过程。控制过程简述如下:如图所示,第一步进电机(6)与第二步进电机(7)经绕线轮(8)、导向轮(9)通过传动线相连接,由此,可通过精准脉冲控制步进电机进而控制柔性针弯曲;上述执行机构均安装在主箱体(4),主箱体(4)经导轨滑台与第三步进电机(13)连接,由此可通过控制多自由度医疗协作机器人和第三步进电机实现精准进针过程。综上,通过多自由度辅助医疗机械臂与柔性进针机器人的耦合控制,可实现全方位多姿态自由运动多角度进针的柔性变路径精准进针。
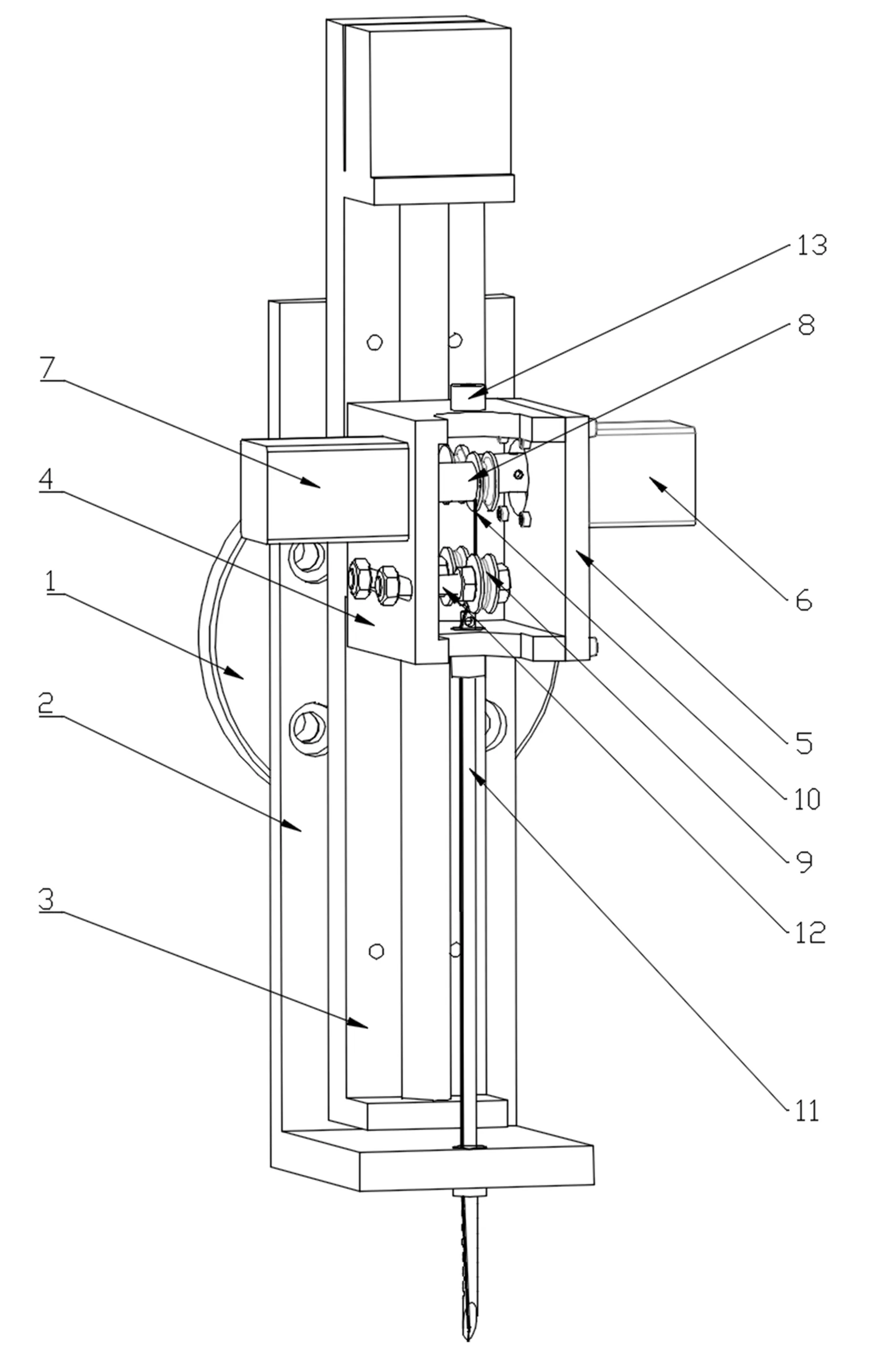
图3 柔性微创线控机器人示意图
为实现微创机器人核心技术的自主可控化要求,研发团队自主设计了如图4所示的神经微创机器人控制系统的集成电路模块:模块①为直流可调降压稳压电源模块,用于稳定输入微控芯片和电机驱动器的电压;模块②为微控芯片,主要用于计算无线接收器传送的数据,并输出机器人运行的准确指令;模块③为外部设备供电部分,其主要功能是为下层控制单元其他外接设备提供电源;模块④为微控芯片程序下载入口和串行数据通信接口;模块⑤为微控单元的预留IO接口和无线接收器接口;模块⑥为手柄有线接口,控制模块同时设置了所述手柄无线接收器接口与有线接口,显著提高了设备调试的效率;模块⑦为协作机器人控制柜的IO接口,微控芯片接收到无线接收器发送的指令后,经过内部运算可直接通过所述接口控制UR辅助医疗机械臂运动,进而实现机器人的精准进针。
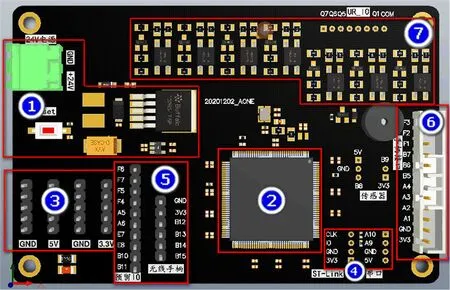
图4 控制系统集成电路
3 实验验证
为了检验医疗机器人是否符合精准微创的临床应用工艺技术和系列化结构技术设计规范,研发团队进行了如图5所示的样机试验。

图5 神经柔性微创机器人样机实验
如图5所示,神经微创机器人系统控制过程:外部相机进行病灶靶点识别(1),多自由度协作机器人携带柔性进针机器人精准运动至病灶靶点(2),无线手柄控制协作机器人与进针机器人耦合运动开始进针(3),无线手柄实时调整医疗机器人位姿开始弯曲进针进行手术(4)。实验表明,神经微创医疗机器人样机系统已经具备了病灶靶点精准识别控制、坐标标定控制、柔性进针控制等功能,为下一步进行微创手术的活体实验及临床应用奠定了良好的技术基础。
4 结论
(1)研发团队研制出协作机器人与线控机器人耦合控制的柔性变路径神经微创机器人系统,具备了神经微创手术中需要的多位姿精准手术定位技术要求,包含多旋转角度、多弯曲角度的精准进针过程,实现了稳定性、可靠性、精准性和灵活性的功能。
(2)采用步进电机线控进针的技术方案,解决了柔性变路径进针机器人多角度精准进针的问题,实现了细分驱动步进电机结合PID电机运动控制算法,防止了步进电机出现失步丢步的问题,达到了步进电机脉冲精准控制的效果,控制精度达到0.01mm。
(3)神经微创机器人系统设计了TCP坐标变换控制方案,达到了神经微创医疗机器人术中多位姿精准定位运动要求,并且研制的机器人系统能够完成360°旋转和90°弯曲的功能。