基于旋转反射镜光学成像的动态目标跟踪方法
2020-09-28卢莉萍郑潇
卢莉萍,郑潇
(1.西安工业大学 计算机科学与工程学院,陕西 西安 710021;2.西安工业大学 电子信息工程学院,陕西 西安 710021)
0 引言
随着国家军事领域的快速发展,迫切需要对现有跟踪中、高速轨道式动态目标的设备性能和效率进行优化与提升,通过对动态目标运动过程的图像信息精准拍摄,结合图像处理方法,实现动态目标的运动轨迹、空间姿态以及其性能等有效分析,提高战场中军事战备效率和武器精准打击目标的概率[1]。传统的光学测量手段为等待式和随动式,随着光学测量技术的发展,美国DERA Fort Halstead and ARL公司率先将利用反射镜跟踪武器目标的科学理论应用到生产中[2],研究了单个高速相机随动式跟踪方法,通过研制的跟踪设备,完成了对靶场动态目标的运动图像实时拍摄,解决了高速轨道式运动目标无法实时跟踪的历史性难题。随后,英国MS公司生产了Flight Follower追踪设备,基于光学反射原理,并采用触发相机对反射镜中运动目标的图像进行快速采集,与美国DERA Fort Halstead and ARL公司研制的设备不同之处在于,按照计算好的位置参数将光学相机与反射镜放置并封装在一个透明盒子中,极大地方便了测试设备使用方的应用,对动态目标的跟踪准确度得到了很大的提高[3-4]。近年来,国内对高速动态目标的研究还处于初期阶段,以高等院校和研究所为主要研究基地,目前仍停留在理论研究阶段,未对相关实验设备进行批量生产,相关技术的成熟度较低[5-6]。基于上述研究背景,本文研究高速轨道式动态目标的光学测量技术,测试设备中增加反射镜,并结合光学成像原理,研究了一种新的动态目标跟踪方法;建立基于旋转反射镜的动态目标运动数学模型,结合图像处理算法实现对系统多参量的调控与优化,完成对中、高速轨道式目标的精准跟踪。
1 基于旋转反射镜光学成像的动态目标跟踪原理
基于旋转反射镜的目标跟踪系统最突出的特点,就是在等待式系统基础上,加入一面反射镜,并将其固定在转台上,由电机控制其转动,以光学相机拍摄反射镜中动态目标的图像代替直接采用光学相机拍摄动态目标,在系统中添加反射镜主要目的就是利用光反射原理[7],减少等待式系统中高速光学相机的损坏率,同时极大地提高了光学相机采集动态目标图像的速度,从而优化系统性能。动态目标跟踪原理如图1所示。

图1 动态目标跟踪系统的跟踪原理示意图Fig.1 Tracking principle diagram of dynamic target tracking system
目标在运动过程中,经过初速度采集系统计算出目标的运动速度信息并传递给计算机,以数学模型为基础,完成对目标的运动参数预估,同时选定控制曲线和控制参数,并传送给反射镜控制系统,并同步触发光学相机。依据光反射原理,当反射镜转动参数与目标运动参数相匹配时,动态目标图像就会在反射镜中成像,由高速光学相机对其进行拍摄,将采集目标的多图像信息实时传送给计算机系统,计算机系统存储并处理目标图像并根据图像处理结果调整控制曲线误差。
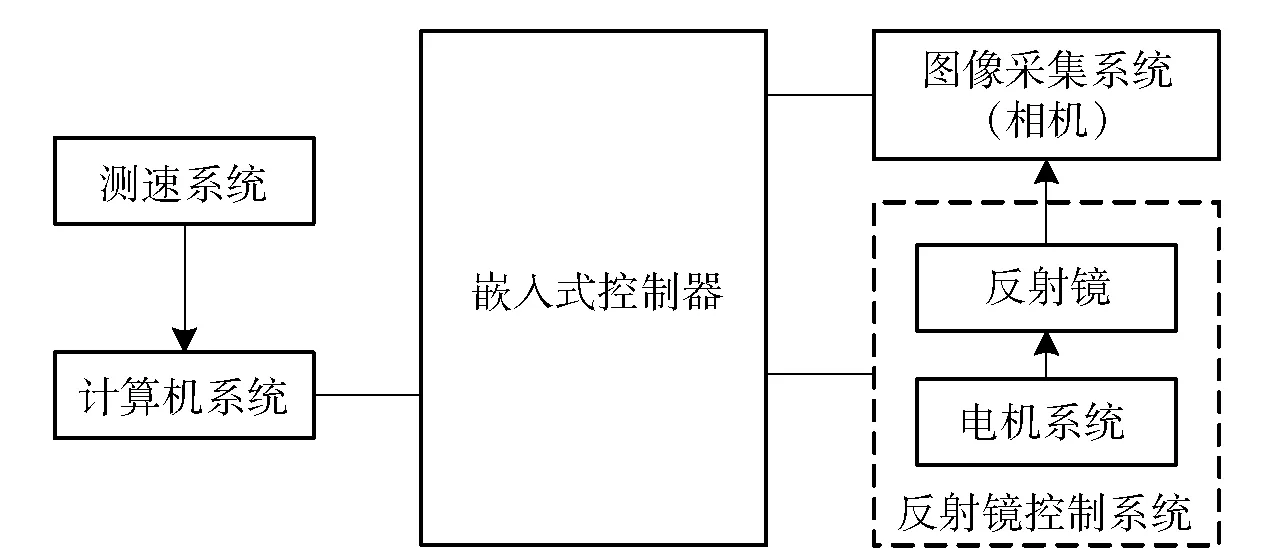
图2 目标跟踪系统总体框图Fig.2 Overall block diagram of target tracking system
如图2所示,目标跟踪系统主要由初速度采集系统、计算机系统、反射镜控制系统、图像采集系统组成。利用光反射原理,采用相机与反射镜结合的方式完成对轨道式目标图像的采集;利用嵌入式控制器、单片机、电机、平面反射镜及光学相机等搭建硬件平台[8],结合目标运动数学模型和图像处理算法[9],完成对轨道式动态目标在高速非匀速运动状态下的快速、实时跟踪。
2 旋转反射镜目标跟踪建模与参数计算
2.1 目标运动参数研究
本文跟踪的目标为中、高速运动的轨道式目标,系统基于光反射原理,以光学相机拍摄反射镜中动态目标图像代替直接拍摄动态目标,因此需要对目标的运动状态进行深入研究[10]。为了使反射镜的旋转角度和速度可以精准配合目标的运动速度,使高速光学相机清楚地采集到目标的运动图像,设计采用光学相机主光轴跟踪方式,即以光学相机主光轴为水平线,保证在目标跟踪过程中,反射镜镜面中心始终与光学相机主光轴相交,其示意图如图3所示,采用光学相机、反射镜为核心器件,构造光学相机主光轴跟踪动态目标的示意图[11]。图3中,设高速光学相机的视场角度为α,反射镜镜面与光学相机的视场中线夹角为β,基于光反射原理,光学相机的视场角经由反射镜反射并交于动态目标的运动轨道的M、N两点。目标A沿轨道运动,设目标质心坐标为x,目标图像经过反射镜在光学相机中呈现虚像的过程,相当于以O′点为圆心,|O′E|=l为半径作圆周运动,且反射镜与轨道的距离为|OO′|=H.

图3 光学相机主光轴跟踪原理图Fig.3 Tracking principle diagram of main optical axis of optical camera
在目标的运动方向上,对光学相机的视场进行分析,根据几何关系,可知光学相机视场边缘点的运动范围为以E′点为中心,以E′M和E′N为半径的扇形,则M、N点的运动方程分别为
(1)

(2)
由此可得目标的运动方程为
(3)
根据三角函数关系,对(3)式两边进行角度变换可得
(4)
对(4)式两边进行求导可得
(5)

(6)
对(6)式两边进行求导,可得
(7)

2.2 反射镜转动规律分析
根据运动学定律,目标通过反射镜在光学相机视场中的运动路径与目标实际运动路径是一致的,通过精准控制反射镜的转动,采用光学相机拍摄反射镜中运动目标的图像,并通过分析建立的目标运动数学模型,对反射镜的旋转参数进行调控[12],使反射镜的角位移和角速度可以精准匹配目标的运动速度变化,实现对运动目标图像的跟踪捕捉。在运动目标有效的跟踪区域中,系统与目标的几何关系如图4所示。
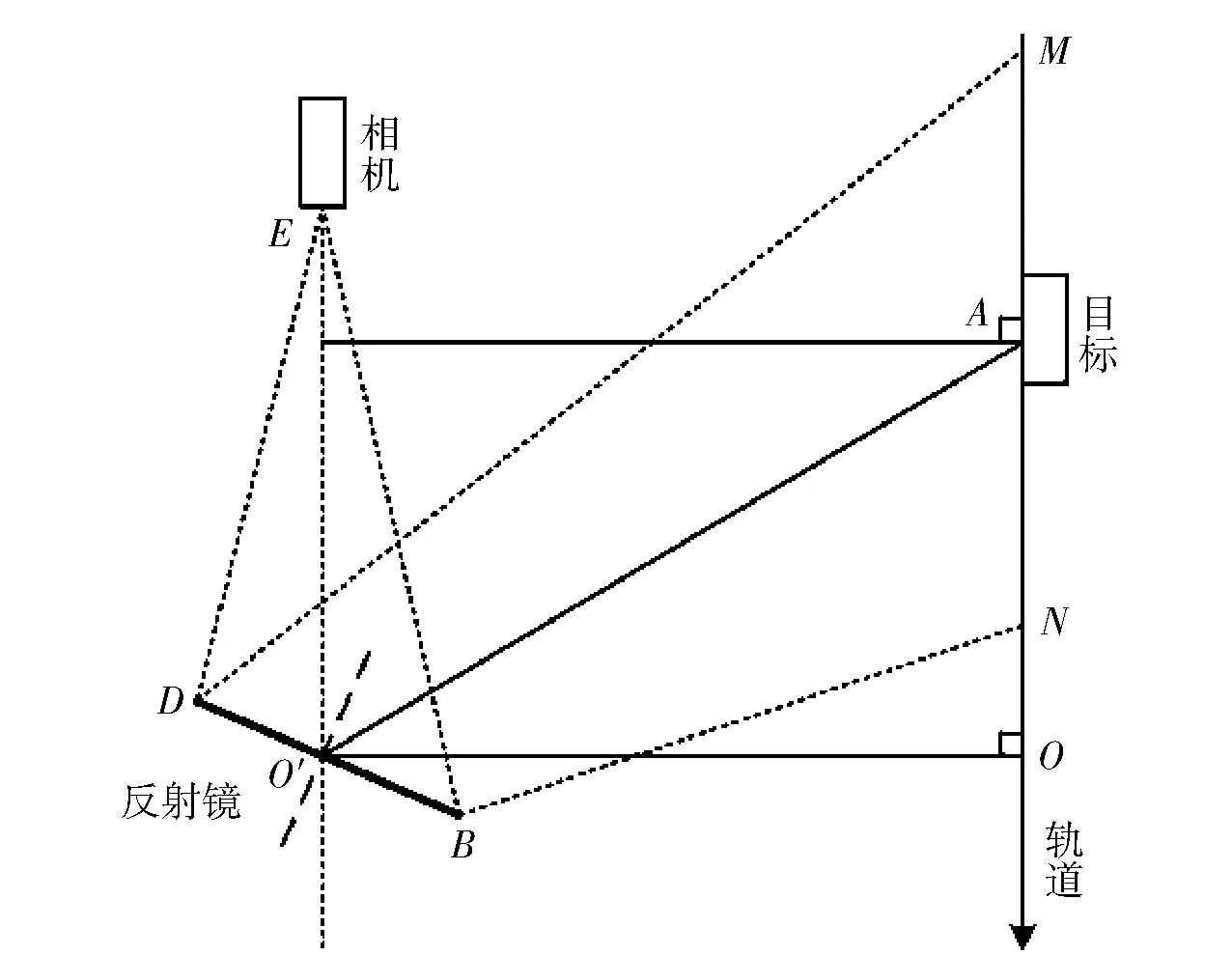
图4 跟踪系统与目标几何关系图Fig.4 Geometrical relationship of tracking system and target
基于光反射原理,设反射镜角速度为ω,转动角度为θ. 在运动目标的跟踪过程中,目标经过反射镜在光学相机中成像,因此,光学相机的视场经过反射镜在目标运动轨道上呈现一段有效距离。结合(1)式和(2)式可知,有效距离|MN|为
(8)
根据系统与目标几何关系分析可知:
(9)
同时,根据目标分速度关系可推导出反射镜的角速度,其与目标速度的关联关系为
(10)
2.3 反射镜角度偏移量分析
针对系统精度需求,对运动目标成像过程进行分析,并将目标、反射镜、透镜以及相机靶面转换至同一条直线上,构造系统跟踪视场有效示意图[13],如图5所示。图5中:1为系统的标准参考位置,2为跟踪过程中系统设备位置,可知系统跟踪过程可等效为光学相机绕反射镜中心做圆周运动;O1为目标与反射镜成平行状态的中心点,O2为反射镜的中心点,O3为光学相机透镜的中心点,O4为光学相机成像靶面的中心点。以目标轨道为X轴,IJ段为跟踪目标,设目标中心点F坐标为x,目标长度为a,经由反射镜反射成像后,目标在光学相机视场成像长度为a′. 其中物距为|O1O3|,像距为|O3O4|=f,透镜与反射镜距离为|O2O3|=b,反射镜与目标运动轨道的距离为H,光学相机靶面长为c. 当目标位于光学相机视场中心时,使目标的一端达到视场边缘,需要反射镜转动角度为θ,定义反射镜角度偏移极值为转角Δα.

图5 反射镜有效跟踪示意图Fig.5 Schematic diagram of effective tracking of mirror
图5中,物距|O1O3|可表示为

(11)
根据相似三角形,即△IFO1~△FGO2,可得a′为
(12)
因此,通过分析光学相机透镜与靶面的几何关系,可得反射镜转角需要转动的角度大小为

(13)
因为反射镜与运动目标轨道的垂直距离远大于反射镜与透镜的距离,且远大于目标尺寸,所以可以忽略a、b的函数值,对(13)式进行简化可得
(14)
反射镜转动角度随目标运动参数变化的公式(12)式代入(14)式,可得反射镜偏移量与目标运动参数之间的关系式为
(15)
由(15)式可知:系统跟踪精度需要在反射镜角度偏移极值范围内,且与设备相对空间位置参数以及设备参数有关,因此代入实验设备参数,系统采用带有(1/3)″电荷耦合器件(CCD)传感器的高速摄像机,且反射镜与目标运动轨道的距离H为50 m;当Δθ≤0.5°时,系统满足精度要求,因为采用闭环控制的两相四线混合式步进电机,转子上齿轮距离被均匀等分,按角度计算,定转子的齿宽和齿距应严格相等;最高的细分精度是256细分(51 200步/圈),细分的精度值可达到360°/51 200=0.007 03°;当定子各相绕组按照四拍通电时即有360°/(50×4)=1.8°,选取四细分的控制方式,即步进电机步距角为1.8°/4=0.45°,就可达到系统要求的精度。
2.4 系统偏移校准策略
在系统发生偏移之后,需要一种手段对系统的偏移值进行实时监测和反馈调整,本文拟采用高速图像处理算法,对相机采集的目标图像进行处理,并以数学模型为基础,对系统反射镜的相关参量进行调整,具体流程如图6所示。

图6 系统校准流程图Fig.6 Flow chart of system calibration
在本系统中,图像采集系统作为采集运动目标图像的重要部分,既为目标跟踪系统实时采集了目标的运动图像,也作为反馈模块的核心器件,为系统的反馈回路提供了重要的偏差信息。因此,在整个控制回路中,相机不仅承担了拍摄任务,同时也相当于系统的传感设备,对系统的运动位置偏差以及速度偏差进行参数信号的传递,将系统实时工作参数与由数学模型预先推算出的理论参数进行对比,从而得到反射镜控制系统需要调整的差值,完成对反射镜转动偏差的调控,从而对系统的精准度进行优化和更新。采用高速图像处理算法对目标图像进行处理后,通过数学模型进行目标坐标转换,解算出目标的位置参数,并应用微分方程求解出目标的状态参数,与预设的电机控制曲线对应参数进行对比,得到系统转动的偏差值,随后将调整值传递给驱动控制系统进行调整,完成系统的反馈控制。
3 目标跟踪控制时间的优化选取
目标跟踪系统的核心是控制反射镜转动参数与目标运动参数相匹配,在跟踪过程中,由于数学模型、硬件设备以及外界环境的影响,会使得系统产生一定的误差,因此需要选取合适的误差范围,在反射镜角度偏移极值Δα范围内,优化系统的控制参数[14]。
根据目标运动数学模型,设最大离散时间间隔为Δt,跟踪目标运动速度为800 m/s,仿真可得离散化后控制曲线如图7所示。
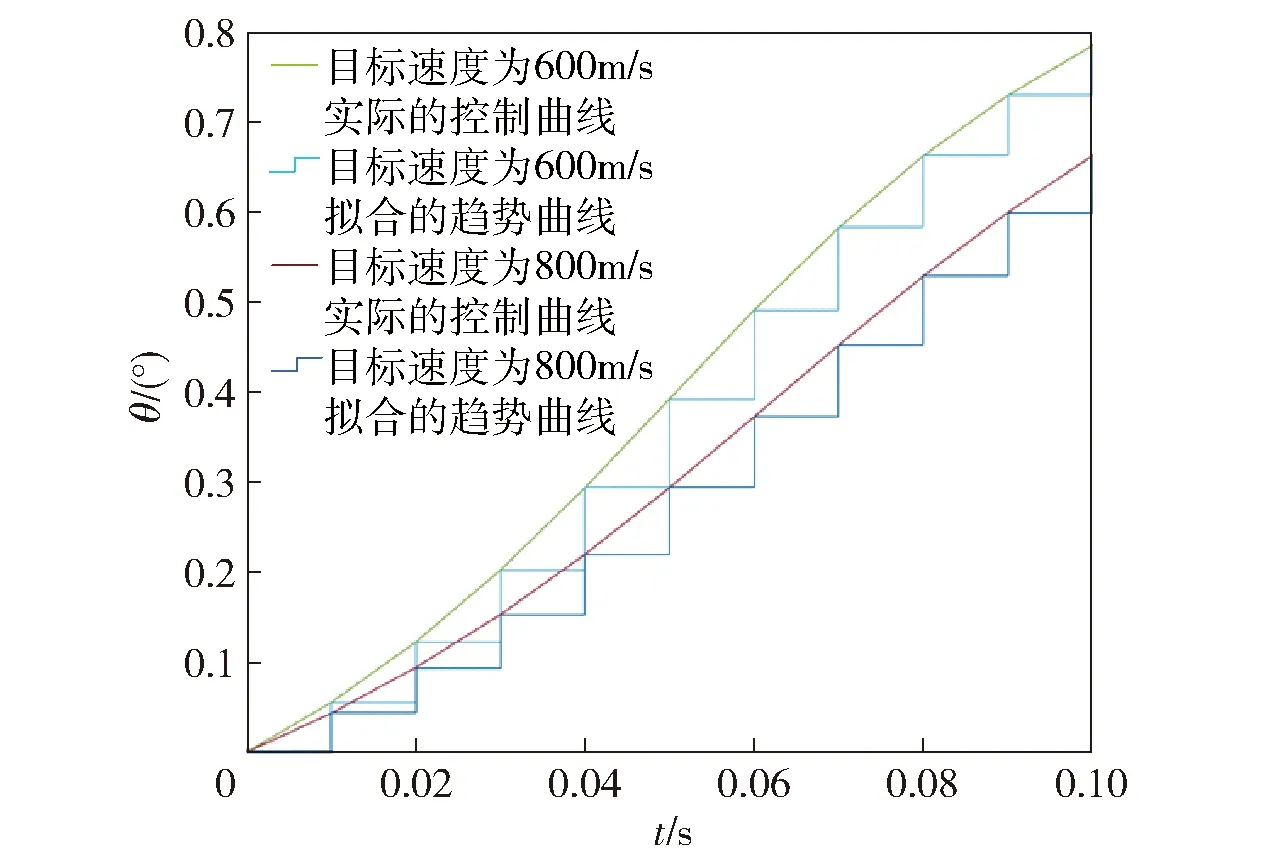
图7 最大离散时间间隔曲线图Fig.7 Curve of maximum discrete time interval
由图7可知,通过调整时间延迟,可以减少速度误差。设速度差值为Δv,Δvy,max为带有速度差值即v+Δv的最大速度误差,Δvn,max为无速度差值即v时的最大速度误差,且Δv=Δvy,max+Δvn,max,因此,推导可知:
(16)
式中:M为最大数据量;vt为目标的初始速度;t0为起始时刻。
本文实验假定参数代入(16)式,可得Δt=2.59 ms,Δv=14.8 m/s. 结合本文精度要求,分别选取Δt=1 ms,Δv=10 m/s.
4 计算与实验分析
4.1 系统仿真验证
为了验证本文研究方案的可行性,对系统进行模拟实验测试,设目标以800 m/s的初速度进入目标跟踪有效区域,目标运动轨道与反射镜装置的垂直距离为50 m,反射镜在有效跟踪区域内的角度变化范围为90°,反射镜角度变化偏移极值Δα=0.5°.
根据目标运动数学模型,可得反射镜的转动角速度和角度随时间的变化分别为
(17)
使用MATLAB软件对(17)式作曲线仿真,可以得到在跟踪时间内,反射镜的转动角度和角速度随时间的变化曲面分别如图8(a)和8(b)所示。

图8 反射镜角度和角速度随时间的变化曲面Fig.8 Changing curved surfaces of angle and angular velocity of mirror over time
本文采取嵌入式控制器,基于目标运动数学模型分析,预先计算好系统控制点数据,通过数据量的数值选取合适的控制器内存参数[15]。
控制器内存参量的大小与额定周期内脉冲量大小有关,本文研究目标为200~800 m/s速度范围内的中、高速轨道式目标,选取速度间隔为Δv=200 m/s,系统控制曲线数值为
(18)
式中:n为系统的转速;vmax为目标的最大运动速度(m/s);vmin为目标的最小运动速度(m/s).
在目标有效跟踪区域内,当目标运动速度为200 m/s时,选取时间间隔为Δt=1 ms,则最大数据量为
(19)
式中:L为有效跟踪距离,L=100 m;N′为系统最大离散控制点数,N′=0.5L/Δt.
在目标跟踪过程中,步进电机通过接收脉冲信号完成对反射镜转动量的控制,则电机脉冲频率为
(20)
由MATLAB软件对(20)式作仿真,可得电机脉冲频率的变化曲面图如图9所示。
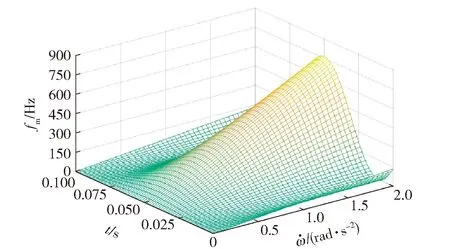
图9 电机工作脉冲频率变化曲面图Fig.9 Changing curved surface of operating pulse frequency of motor
由图9可知,系统跟踪运动目标时,步进电机先加速、再减速,通过优化电机参数可提高系统跟踪目标的精准度。同时,将反射镜的理论转动角速度仿真曲面图进行图像转换可得图10.
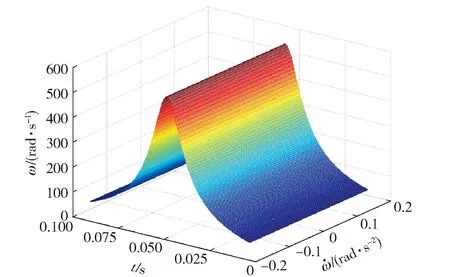
图10 反射镜转动速度变化曲面图Fig.10 Changing curved surface of rotation speed of mirror
图9和图10的三维变化曲面转换成二维曲线图进行对比,如图11所示。

图11 系统转速对比曲线图Fig.11 Rotating speed comparison curves of system
由图11可知,在目标有效跟踪视场内,两条曲线几乎重合,同时,电机的步距角为0.45°在反射镜角度变化偏移极值范围内,可知电机在跟踪过程中将以接近理论的曲线带动反射镜转动,可以实现对目标的同步跟踪。
4.2 系统模拟实验
针对目标跟踪系统的相关设计,初步制造了一台目标跟踪系统样机,同时鉴于实验室场所限制,将系统实验进行成比例缩小,设计采用灯带上的灯珠模拟实验目标,以水平放置的直线型灯带模拟目标的运动轨道,其中灯带长为2 m,灯珠数量为40个。在完成系统初始位置搭建后,将系统样机与灯带前端并齐放置,在系统有效跟踪视场内对灯珠进行图像采集;利用程序来调整灯带的流速,可模拟目标运动速度的变化;在一次试验中,将目标速度分别调整为240 m/s、210 m/s、320 m/s的情况下,模拟目标动态变化的过程,并给出系统在不同时刻点以及目标在不同速度下相机拍摄到反射镜中的图像,如图12所示。
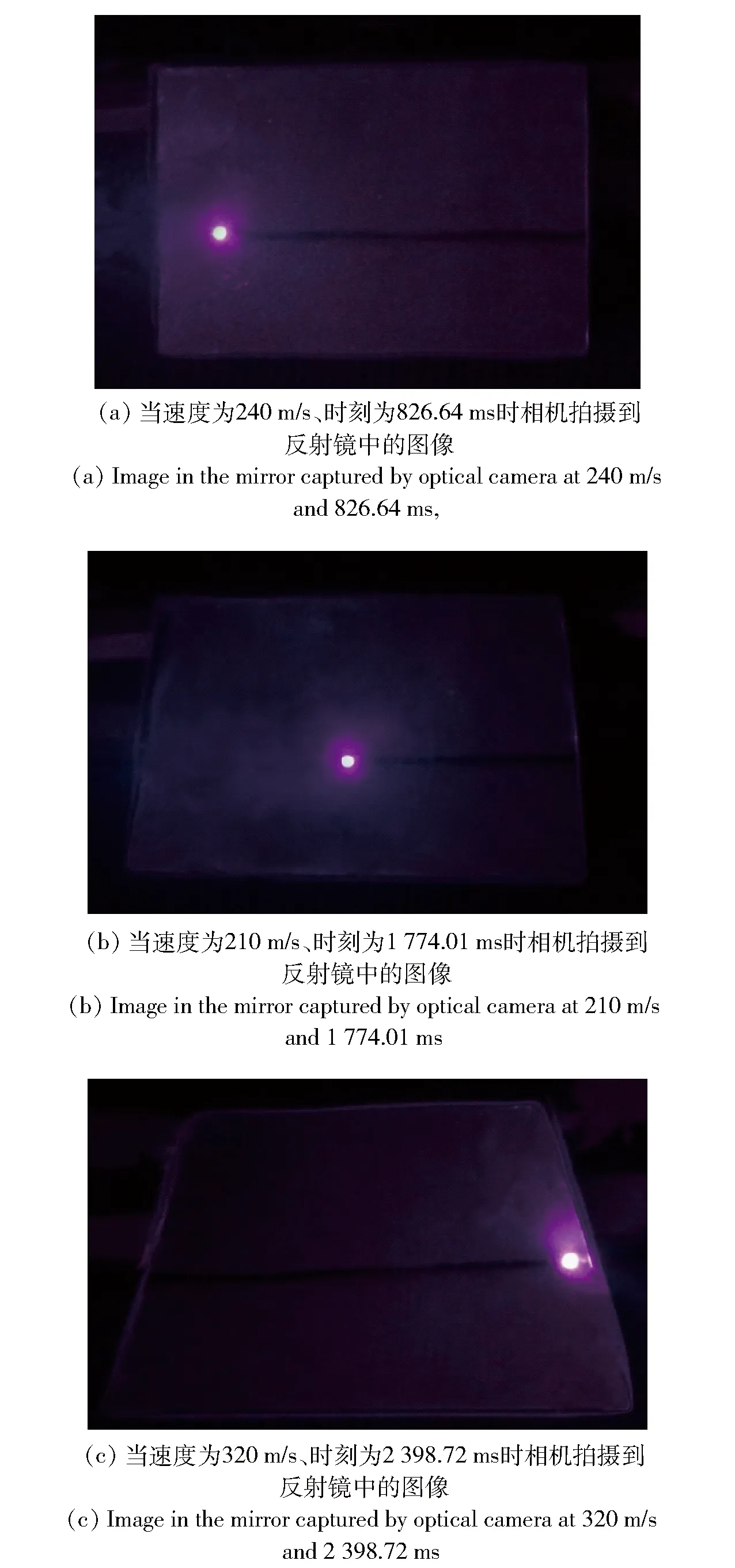
图12 3个不同时刻点相机拍摄的图像Fig.12 Collecting images of optical camera at three different times
在图12(a)中,给出了速度为240 m/s、时刻为826.64 ms时相机拍摄到反射镜中的图像,图像中显示当前时刻发光的灯珠,该发光灯珠按从左往右的顺序为第2个;在图12(b)中,目标速度已调整为210 m/s,当采集的时刻为1 774.01 ms时相机拍摄到反射镜中的图像,该发光灯珠的顺序为第19个;在图12(c)中,目标速度增加到320 m/s,给出了采集时刻为2 398.72 ms时相机拍摄到反射镜中的图像,此时,该发光灯珠的顺序为第38个。通过计算比较发现,这3个不同时刻值与发光灯珠的理论时刻值接近;同时,从拍摄的模拟目标图像来看,3个不同时刻点相机都拍摄到较清晰且发光的灯珠,说明系统已达到跟踪目标的目的,并验证了本文所建立的数学模型的可行性和有效性。
5 结论
通过对基于旋转反射镜光学成像的动态目标跟踪方法研究,本文构建了目标运动数学模型,分析了反射镜转动参数与目标运动参数之间的关系。基于MATLAB软件完成了目标运动数学模型的仿真验证,并设计模拟实验测试研究方案的可行性。通过仿真计算和模拟实验结果分析,验证了该研究方案,实现了对运动目标的同步跟踪;同时,随着目标运动速度的增大,系统的跟踪精度必然受到影响。为了提高系统的跟踪精度,可通过相关的图像处理方法将目标与背景分离,获得更加清晰的目标图像,有助于更好地目标检测、识别与跟踪,进一步提高系统的跟踪性能。本文所建立的模型为军事领域动态目标的可靠跟踪提供了新的跟踪方法,研究成果为目标跟踪的发展具有实际应用价值。
