提高多相机视场组合精度的调节措施
2018-11-16张则梅刘四伟吴杰
张则梅 刘四伟 吴杰
摘 要:为满足多相机组合视场的精度调节要求,通过有倾角的过渡环对相机的视场进行初步补偿。然后,利用三点决定一面的原理,在相机视场内设置三个激光点,通过激光跟踪仪测量出三个点的坐标,从而结算出相机视场与水平面之间的实际夹角。最后,通过在过渡环安装螺钉处垫装相应厚度的垫片,将相机视场精确修正到可接受的水平范围内。
关键词:相机;视场;组合精度;激光跟踪仪
1 前言
为满足精确、全面成像的市场要求,越来越多行业采用多相机组合形式对所需范围进行拍照成像。为保证成像清晰、且在规定的成像范围内,要求各相机的单台安装高度、视场夹角、组合安装高度等需满足较高的精度要求。同时,由于各相机自身机械加工精度、视场角度、安装精度等条件的限制及误差累计,使得各相机之间存在一定差异,需要在装配过程中根据实测精度进行实时调整。本文以4台相机的组合方式为例,对组合式相机精度的调节措施进行描述。
2 组合相机视场调节研究背景
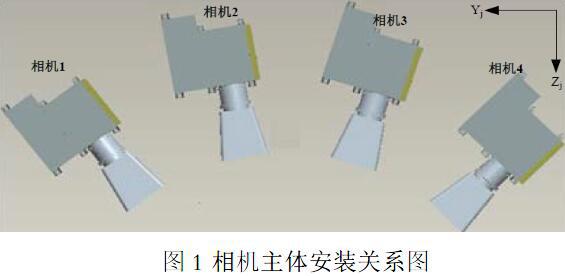
如下图所示,4台相机主体呈内敛式安装在一块结构板上,相邻两台相机主体光轴夹角为 27.8°。由于4台相机探测器输出线阵偏场使用,导致相机视轴与光轴不重合,而是存在1.8276°的夹角。为保证不同入射角下相机视场不偏出需求范围,在相机安装时需要对相机主体的视角进行补偿,从而保证相机主体视轴与安装基体(旋转体)旋转轴垂直。由于存在一定程度的安装误差,每台相机视场的实际仰角存在不同程度的偏差。因此,还需对每台相机安装后的视场实际仰角进行测量,进而实施精确补偿。
3 相机视场测试调节原理
相机视场测试调节利用三点决定一面的原理,即在每台相机视场内设置P1、P2、P3三个激光点,其中P2和P3所在的垂面与基体Y轴所在垂面平行。若测得这三个点的坐标,求得L12、L23、L13、h2、h3五个参量,即可计算得到相机视场面与水平面的夹角θ,以及此两面交线与基体+Y轴夹角ψ。
已知载荷视场面与水平面的关系后,可在有倾角过渡环下端选择合适的2个位置进行螺钉垫片补偿,并可计算所需垫片的厚度d2和d3。
4相机视场调节方法研究
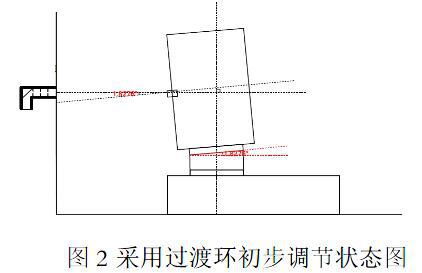
4.1 采用过渡环初步调节
引入上法兰倾斜角度为1.82°的过渡环,将其垫装在星体与转台之间,对相机视角进行初步补偿,如下图所示。
为提高测试精度,需要获知采用有倾角的过渡环补偿后,相机视场面与水平面的倾角是多少。正式测试时,根据测量结果,再在过渡环底部选定螺钉位置,利用垫片进行角度二次补偿,使相机视场面最终与水平面平行。
4.2 相机视角精确补偿
调节相机视场必须要测量相机的视场,而相机的视场无法直接测量,因此需要借用激光器照射成像工装上,使相机对激光照射点成像,微调激光照射点位置,使得激光点成像灰度值为最大值。此时,激光照射点即为相机视场中的一点,在该点处粘贴靶标,使用两台经纬仪建立MetroIn工业三坐标测量系统,测量靶标即可测出相机的视场。
(1)调整安装基体转台水平
将激光跟踪仪调水平,并且进行水平校准,调整基体转台撑脚,将转台调水平。
(2)安装倾斜过度环,并调整方位
使用激光跟踪仪1.5英寸靶球测量墙,并拟合墙平面。使用激光跟踪仪配件T-Probe+0.1mm测针,测量过度环Z向刻线,并拟合出过渡环Z向,使用激光跟踪仪SA软件,可得到过度环Z向在水平面上的投影与墙面的夹角α。转台旋转α角,使Z向在水平面内的投影与墙面垂直。
(3)使用两台经纬仪建立MetroIn工业三坐标测量系统
两台经纬仪均在建立系统前均须精确调水平,建立的MetroIn工业三坐标测量系统的测量坐标系是经纬仪1互瞄向经纬仪2的方向在经纬仪1水平度盘内的投影线为X轴,Y轴在水平面内垂直X轴,以右手准直确定为Z轴,坐标系原點为经纬仪1的坐标系原点。
(4)近场P1位置测量:
A.在近场放置成像工装,利用激光器在预估相机观测区域内、成像工装上,照射激光垂线(激光水平仪输出);
B.观测遥感判断软件成像曲线图峰值位置,调整激光垂线位置,使得峰值出现在相机视场中心位置附近,即获知成像工装上视场中心对应区域;
C.采用激光器照射成像工装上视场中心区域,使相机对激光照射点成像,微调激光照射点位置,使得激光点成像灰度值为最大值。此时,激光照射点即P1位置;
D.在P1点位置粘贴靶标,使用MetroIn工业三坐标测量系统测量P1点坐标值。
(5)远场-Y侧P2位置测量:
A.撤出近场工装,采用激光水平仪在平行于安装基体对地面墙面照射激光垂线;
B.观测遥感相机判断软件成像曲线图峰值位置,调整激光水平仪,使得峰值出现在视场-Y侧边缘附近(判断软件微光通道右侧,高亮通道左侧);
C.采用激光器照射成像视场-Y侧边缘区域,使相机对激光照射点成像,微调激光照射点位置,使得激光点成像灰度值为最大值。此时,激光照射点即P2位置;
D.在P2点位置粘贴靶标,使用MetroIn工业三坐标测量系统测量P2点坐标值。
(6)远场+Y侧P3位置测量与P2相同,得到P3点坐标值;
(7)根据P1、P2、P3解算L12、L23、L13、h2、h3五个参量,并解算出相机视场面与水平面的夹角θ,以及此两面交线与基体+Y轴夹角ψ;
(8)根据θ和ψ,在过渡环底部选定需要加垫片的2个螺孔位置,从而可解算垫片d2和d3高度;
(9)加垫片后安装基体至过渡环,按a)~e)步骤复测相机视场面水否水平;若水平则完成视场倾角的补偿,若仍不水平则根据重新测量的结果;
(10)一个相机完成视场预测后,在基体转台法兰面下部粘贴棱镜,并使用经纬仪测量并记录棱镜两相邻镜面的俯仰角,用于转台姿态的复位。
4 结论
多相机市场组合精度的研究经历了原理构想、理论分析、现场测量调整等过程。在相机视场的调节中,以理论研究为基础,分析影响测量及调整的因素,通过激光跟踪仪与经纬仪联合使用,成功完成了相机视场的测量与调整。该相机视场调节措施已在多次使用过程中得到了验证,满足各项性能指标。
参考文献:
[1] 于成浩,柯明,赵振堂 提高激光跟踪仪测量精度的措施 [J].2007,32(2),54-56
[2] 周俊. 电子经纬仪的误差修正和模型仿真 [D]. 南京航空航天大学. 2005
[3] 金志皓. 光学坐标测量靶标标定研究及软件设计 [D]. 天津大学. 2007
[4] 张博,彭军.激光跟踪仪测量系统[J].计量技术,2006,26(4)
作者简介:
张则梅,女,(1985-),工学硕士,八院卫星装备研究所,主任工艺师(高级工程师),飞行器设计专业.
