接触式轮廓仪的自动标注数学模型
2020-09-10崔煜
崔煜


摘要:为2020年全国大学生数学建模竞赛D题提供可行解法,针对探针沾污、探针缺陷、扫描位置不准导致的轮廓仪数据不准问题,利用matlab对数据进行分段处理,进而确定水平线轴线,拟合曲线段,斜线段,确定交点坐标、利用基本的数学知识建立模型求解出工件直线段各个参数,用最小二乘法拟合和圆弧。针对有倾斜角的工件测量数据,利用旋转变换法将有倾斜角度的工件测量数据水平校正。
关键词:数据拟合;标注;最小二乘法;旋转变换
1.问题的提出
轮廓仪是一种两坐标测量仪器,它由工作平台、夹具、被测工件、探针、传感器和伺服驱动等部件组成。其工作原理是,探针接触到被测工件表面并匀速滑行,传感器感受到被测表面的几何变化,在X和Z方向分别采样,并转换成电信号。该电信号经放大等处理,转换成数字信号储存在数据文件中。
轮廓曲线理想状况下是光滑的,但由于接触式轮廓仪存在探针沾污、探针缺陷、扫描位置不准等问题,呈现出粗糙不平的情况,这给工件形状的准确标注带来影响。
因此简化问题,假设被测工件的轮廓线是由直线和圆弧构成的平面曲线(见图4)。请建立数学模型,根据附件1(工件1的水平和倾斜测量数据)、附件2~附件4(工件2的多次测量数据)所提供的轮廓仪测量数据,研究下列问题:
问题1是根据附件1中的工件1在水平状态下的测量数据即表level,其轮廓线如图4所示,请标注出轮廓线的各项参数值:槽口宽度、圆弧半径、圆心之间的距离、圆弧的长度、水平线段的长度、斜线线段的长度、斜线与水平线之间的夹角和人字形线的高度。
问题2是在同一工件在不同次测量时,由于工件放置的角度和位置不同,轮廓线参数的计算值也会存在差异。附件1中的表down给出了工件1在倾斜一个角度和有一些水平位移状态下轮廓线的测量数据。请计算该工件测量时的倾斜角度,并作水平校正。在数据校正后,完成问题1的任务,并比较两种测量状态下工件1各项参数计算值之间的差异。
2.数据处理
通过初步分析,发现附件1中原始较为完整,不存在缺失和重复,数据精度比较高,到小数点后九位。而matlab中精度是小数点后四位,所以采用excel进行计算,采用matlab进行画图。
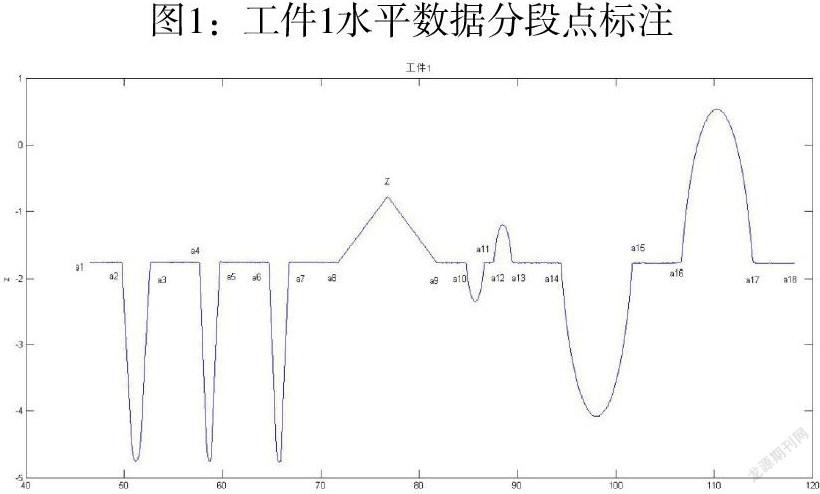
将工件1中level表格的数据导入matlab,利用画图函数可得如下图1,为了更清楚明确的计算各个参数,分别在图中标注了各个分段点,同时也将数据按点分段。
通过图1可以看到水平线段有8段,圆弧有7段,人字高数据一段。
3.问题一模型的建立与求解
3.1模型的建立
由于工件1轮廓线中水平线在放大后粗糙凹凸不平,不能够直接从图形中选取分段点。假设工件水平面光滑,统计数据分析,拟合各个水平线段的直线方程。再与各个曲线拟合的方程联立求解得出交点。
1、对于水平线,求8段数据的平均数
其中为第段水平数据段的平均值。
2、对于斜线建立直线模型
其中对于参数的设定用数据拟合方法。
3、由于水平线上拐角处凹凸不平,很难确定端点坐标,同时为了较为准确合理的求出工件的水平长度、夹角,利用曲线拟合数据来计算端点,对于每一条弧线假设满足方程:
4、类似中学数学中求点的坐标的方法,分别联立水平线和2条斜线方程
解方程可得的坐標。
5、类似中学数学中求点的坐标的方法,分别联立水平线和曲线方程
解方程可得的横坐标。
6、因此可以计算得出槽口宽度
7、为了方便求出夹角,三个铅笔轮廓与水平线相交的上部分近似的看成直线段,拟合出直线段的直线方程
8、铅笔轮廓上半段直线、斜线与水平线之间的夹角的正切为,则斜线与水平线之间的夹角为
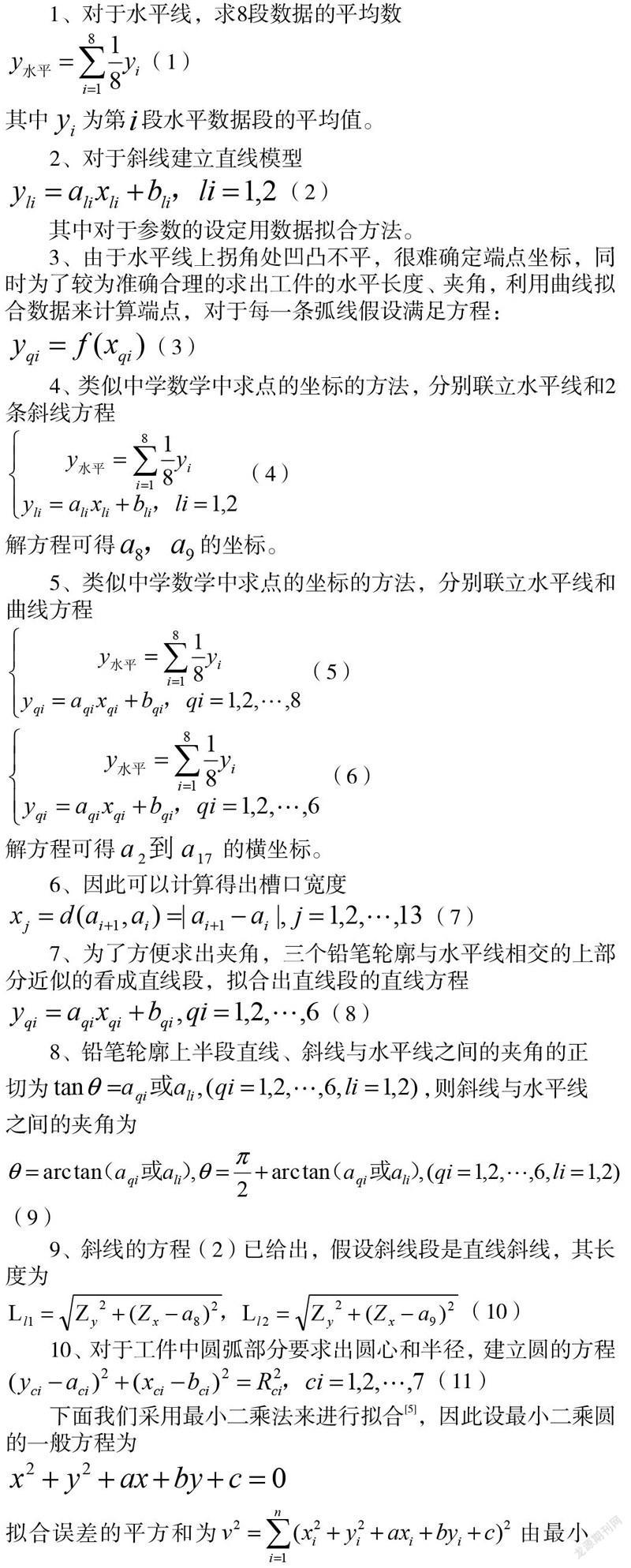
9、斜线的方程(2)已给出,假设斜线段是直线斜线,其长度为
10、对于工件中圆弧部分要求出圆心和半径,建立圆的方程
下面我们采用最小二乘法来进行拟合[5],因此设最小二乘圆的一般方程为
拟合误差的平方和为由最小二乘法原理求得的参数使得最小,必须让、和通过对系数求偏导并令其导数为零,可得
通过求解上述矩阵方程可得一般圆的方程系数,通过圆的方程变换可得拟合圆的半径和圆心坐标如下:
11、圆心之间的距离
12、对于圆弧长的求解,我们利用圆弧长公式
其中是圆的半径,为圆弧对应的圆心角,当圆弧与水平面相交时(大小圆弧),交点为。
对于的求解利用余弦定理得出
当圆弧不与水平面相交时(铅笔轮廓),联立圆的方程与直线方程得
(17)
解方程组可得圆弧左边交点,圆弧右边交点
由弧与左右直线相交交点与圆心构成等腰三角形,两腰夹的角利用余弦定理可求得,公式如下:
3.2模型的求解
3.2.1槽口宽度求解
如图1所示,槽口宽度即两个横坐标之间的差值,只要把横坐标求出来即可。要通过求交点求出横坐标,则先把曲线的方程拟合出来,通过matlab工具箱cftool把工件1中10段曲线数据段和两段直线数据段拟合出来,其中前三个凸出来的铅笔头轮廓,分成两端进行拟合,是为了提高拟合精度,结果如下表:
通过(4),(5)和(6)三个方程组通过解得的横坐标如下表
其中和为数据的起始点。
利用水平端点的坐标数据,横坐标做差得到槽口宽度如表3
3.2.2人字形高度及斜线长度求解
两条斜线之间的交点可以通过联立两直线方程
可得两直线的交点Z坐标(),人字形高可以通过减去水平线高。
由excel软件求解得人字形高位0.9868。
对于斜线段得长度得求解,下端点分别为上端点坐标为()因此斜线段长度为:
3.2.3斜线与水平线之间的夹角求解
为了简化计算,将三个铅笔轮廓与水平线相交的上部分近似的看成直线段,数据上选取部分数据作直线拟合,而对于斜线段直接选取数据拟合,求出得8条直线方程、斜率和斜倾斜角如下表:
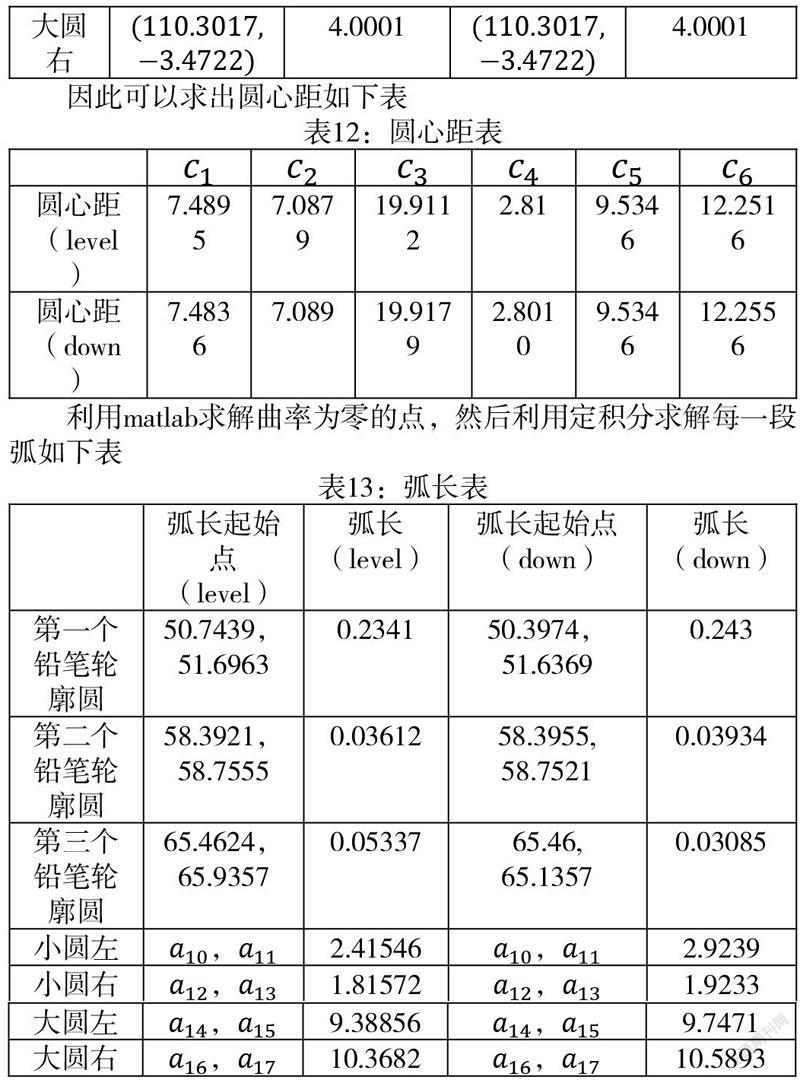
3.2.4圆心、圆的半径及弧长的求解
首先由最小二乘法拟合出圆的方程如下表
因此可以求出圆心距如下表
利用matlab求解曲率为零的点,然后利用定积分求解每一段弧如下表
4.问题二模型的建立与求解
4.1模型的建立
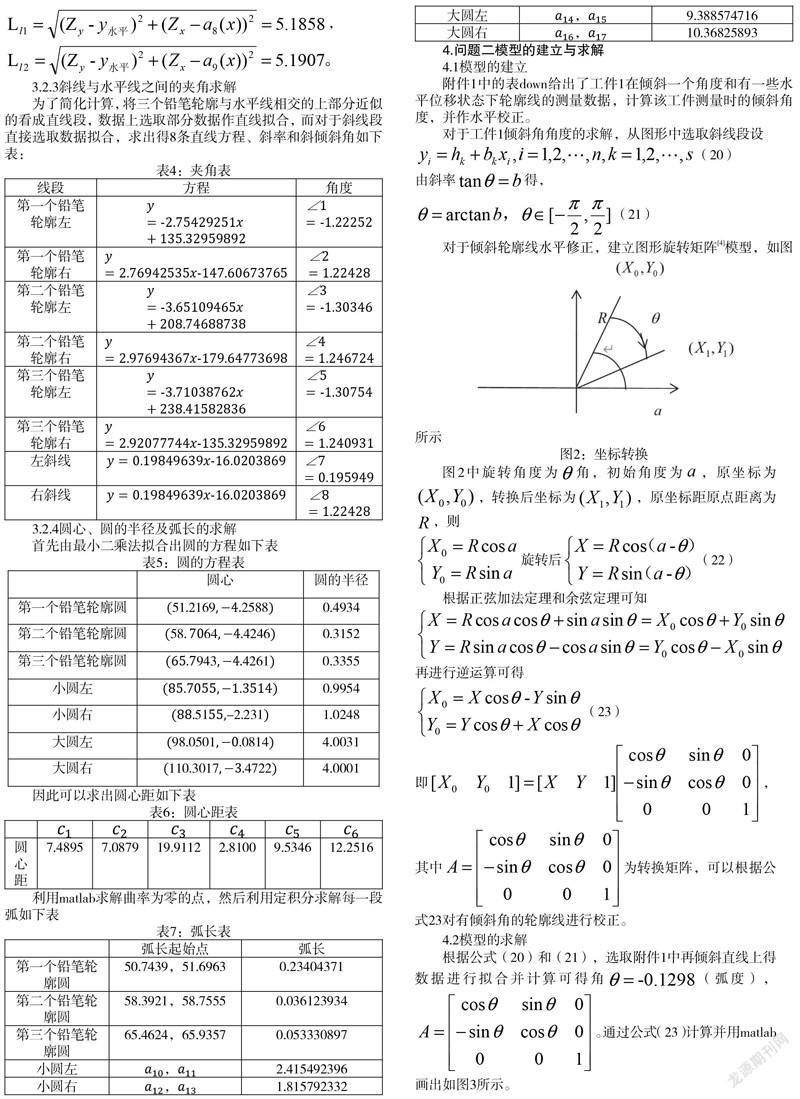
附件1中的表down给出了工件1在倾斜一个角度和有一些水平位移状态下轮廓线的测量数据,计算该工件测量时的倾斜角度,并作水平校正。
对于工件1倾斜角角度的求解,从图形中选取斜线段设
对于倾斜轮廓线水平修正,建立图形旋转矩阵[4]模型,如图所示
图2中旋转角度为角,初始角度为,原坐标为,转换后坐标为,原坐标距原点距离为,则
根据正弦加法定理和余弦定理可知
再进行逆运算可得
即,其中为转换矩阵,可以根据公式23对有倾斜角的轮廓线进行校正。
4.2模型的求解
根据公式(20)和(21),选取附件1中再倾斜直线上得数据进行拟合并计算可得角(弧度),。通过公式(23)计算并用matlab画出如图3所示。
在数据校正后,采用与问题一同样的计算方法,对上图中的轮廓线相关参数进行求解。求得的结果与图一中相关数据进行对比。
4.2.1槽口宽度
先对斜线,圆弧进行数据拟合,然后通过直线的方程和圆的方程计算出端点的横坐标。
利用水平端点的坐标数据,横坐标做差得到槽口宽度如表3
4.2.2人字形高度及斜线长度求解
由excel软件求解得。对于斜线段的长度得求解,下断点分别为,上端点坐标为()因此斜线段长度为:,。
4.2.3斜线与水平线之间的夹角求解
为了简化计算,将三个铅笔轮廓与水平线相交的上部分近似的看成直线段,数据上选取部分数据作直线拟合,而对于斜线段直接选取数据拟合,求出得8条直线方程、斜率和斜倾斜角如下表:
4.2.4圓心、圆的半径及弧长的求解
首先由最小二乘法拟合出圆的方程如下表
因此可以求出圆心距如下表
利用matlab求解曲率为零的点,然后利用定积分求解每一段弧如下表
5.结论
本文对探针沾污、探针缺陷、扫描位置不准等问题带来的数据不准问题,建立数学模型对工件形状相关参数准确标注,建立模型所运用的数学知识简单易懂,计算方法简单易行。对于圆弧圆的半径和圆心的求解,利用最小二乘法拟合,较为理想的确定圆的半径和圆心,提高数据的准确性,实现轮廓线自动标定。对于有倾斜一个角度的工件数据,采用旋转变换实现数据调整为正常状态。
参考文献:
[1]赵琦,解琳琳,侯妙乐,刘浩宇.基于点云数据的雀替轮廓线参数信息自动化提取方法[J].地理信息世界,2018年,第25卷第5期
[2]韩志国,李锁印,冯亚南,赵琳.接触式轮廓仪探针状态检查图形样块的研制[J],微电子技术,2019年第9期
[3]陈十进,刘瑾,杨海马,刘海珊,韦钰,肖俊,解光耀.非接触式钢轨三维轮廓参数检测系统研究[J].仪表技术与传感器,2019年第5期
[4]闫志刚,图形学中绕任意轴旋转矩阵的推广[J].计算机时代,2009年第12期
[5]杨旭东,大量程轮廓综合测量系统研究[J].华中科技大学博士论文.2007年5月
[6]司守奎,孙兆,数学建模算法与应用[M].国防工业出版社.2015年4月(第二版)
[7]姜启源,数学模型[M],高等教育出版社,2008年3月(第三版)
(浙江交通职业技术学院 人文学院 杭州 311112)