基于压电陶瓷的纳米定位与扫描平台模型辨识算法研究
2017-01-13郭兴旺邵萌戴敬
郭兴旺+邵萌+戴敬
【摘要】 针对纳米定位与扫描平台具有的迟滞特性,使得运动平台输出位移变差的问题,文章基于Bouc-wen模型建立了纳米与扫描平台的模型,采用最小二乘法实现了模型参数辨识。通过传统PID控制,实现信号实时跟踪。实验结果表明,所建模型对信号的跟踪,大约需要经过2ms便可达到稳定状态,稳态误差保持在4nm之内,因此,可以达到降低输出位移误差的效果。
【关键词】 纳米定位与扫描平台 bouc-wen模型 最小二乘法 参数辨识
一、引言
近年来,随着纳米技术的发展,微纳米控制的运动平台也成为了研究的热点。但是,压电陶瓷具备的动态特性、耦合特性、迟滞特性、蠕变特性以及运动平台的机械振动特性会使得系统的精度降低、运行速度减慢,并且会引起系统的不稳定。其中,由于迟滞特性具备非局部记忆性、多值映射和率相关等性能,对纳米定位与扫面平台的定位精度影响较大,因此,本文将对纳米定位与扫描平台的迟滞特性进行研究,旨在消除迟滞误差,提高纳米定位与扫面平台的定位精度。目前,有关纳米定位与扫描平台迟滞特性研究的方法主要有,Lin等[1]采用Bouc-Wen模型,设计了以PI反馈控制器控制运动平台的方案,使得系统的鲁棒性更高。BoucWen模型,由于具有参数少、数值化简单等优点,本文将在研究前人成果的基础上,基于Bouc-Wen模型,利用最小二乘法,对纳米定位与扫描平台的迟滞特性进行建模以及模型参数辨识,以减小位移误差,实现纳米定位与扫描平台的精确定位。
二、纳米定位与扫描平台的模型建立
2.1 纳米定位与扫描平台的基本结构
纳米定位与扫描平台的基本组成一般包含三个模块,分别为:纳米定位与扫描平台、检测装置和控制系统。
本文中纳米定位与扫描平台是由压电陶瓷进行驱动,且由两路独立的电压信号分别控制X、Y方向位移,输入电压范围为-10V-10V,纳米定位与扫描平台的位移范围为100μm×100μm
2.2基于Bouc-wen模型的纳米定位与扫描平台迟滞建模
Bouc-Wen模型是一种经典的微分多项式类的迟滞模型,该模型一般通过构建微分方程的方式来呈现输出信号随输入信号的变化,从而通过微分方程来对系统进行迟滞建模。标准Bouc-Wen模型的数学表达式为:
ΦBW(t)=αk·u(t)+(1-α)Dk·z(t) (1)
其中,u(t)为系统的输入;ΦBW(t)代表系统的迟滞输出;k为系统的初始等效刚度系数;α为权重系数,z为模型的迟滞非线性项。
(1)式中的z(t)进行微分,可得,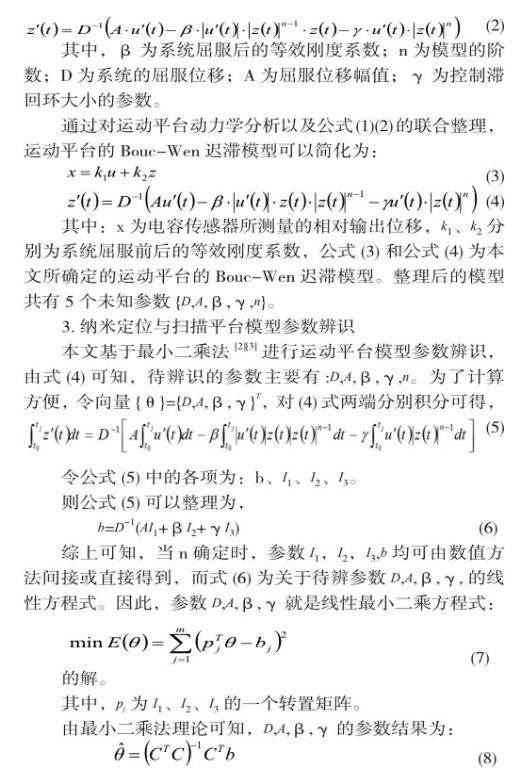
其中,C为p转置的一个列矩阵,b为一个常量列矩阵。
由于参数n主要影响迟滞曲线的光滑程度,并无对其他方面的影响,且参数n不属于敏感参数,因而,当参数D,A,β,γ固定不变时,n的变化对迟滞模型曲线并无明显的影响。
四、MATLAB实验仿真
针对本文所确定的纳米定位与扫描平台迟滞模型,通过传统PID控制,经MATLAB实验仿真,实现信号的实时跟踪,检验其对输入信号的跟踪性能。
⑴ 在采样频率f=50kHz时,输入一个阶跃信号,幅值为1μm,得到的仿真实验结果,如图1所示。
由图1可知,在采样频率f=50kHz,输入一个幅值为1μm的阶跃信号,系统输出位置信号大约需要2.0ms进入稳定状态。
⑵ 在采样频率f=50kHz时,输入一个方波信号,幅值为-1μm×1μm,得到的仿真实验结果,如图2所示。
在采样频率f=50kHz,幅值在-1μm×1μm范围内时,由图2可知,每当信号方向发生改变时,系统输出位置信号大约需要2.0ms进入稳定状态,且输出位移稳态误差大约在4nm之内。
五、总结
本文通过最小二乘法对所建模型进行参数辨识。而且通过对纳米定位与扫描平台建模,以减小系统迟滞特性对运动平台输出位移的影响。分别输入一个阶跃信号和一个方波信号,经MATLAB实验仿真可知,系统输出位置信号均大约需要2.0ms进入稳定状态,很大程度上提高了运动平台的定位精度。
参 考 文 献
[1] Lin C,Yang S. Precise positioning of piezo-actuated stages using hysteresis-observer based control[C]. Prague,Czech Republic: IF AC Secretariat,2005.
[2]李玲,蔡安江,蔡力钢,阮晓光,赵永胜.基于Bouc-Wen模型辨识结合面动态特性研究[J].振动与冲击.2013,32(20):139-144.[3]张建明,周传勇.基于最小二乘法的bouc-wen模型参数辨识[J].科技创新导报.2013,06:150-151.
