壳体结构浅水湿模态数值仿真及试验
2020-09-07秦丽萍胡会朋李治涛赵世平
秦丽萍, 胡会朋, 李治涛, 赵世平
壳体结构浅水湿模态数值仿真及试验
秦丽萍1,2, 胡会朋1,2, 李治涛1,2, 赵世平1
(1. 中国船舶重工集团公司 第713研究所, 河南 郑州, 450015; 2. 河南省水下智能装备重点实验室, 河南 郑州, 450015)
航行器壳体结构在浅水中的模态特征直接影响其出水动态响应的大小。文中基于声固耦合法建立了某水下航行器壳体结构浅水湿模态仿真模型, 采用零声压自由液面仿真方法分析了浸水深度变化对该结构湿模态特性的影响; 设计并搭建了该壳体湿模态试验系统, 用PolyMax法获取其湿模态特征信息。通过仿真与试验的对比分析, 结果表明: 仿真与试验结果吻合良好, 验证了湿模态仿真模型的有效性, 可用于浅水结构的湿模态分析; 在浅水条件下随着浸水深度的增加, 湿模态频率逐渐减小, 后趋于稳定; 湿模态阻尼比是干模态的2~8倍, 且随水深无明显规律。
水下航行器; 壳体结构; 湿模态; 模态试验; 声固耦合; 浅水
0 引言
模态分析是研究结构动力学特性的一种近代方法, 是系统辨识在振动工程领域中的应用。通过模态分析可获取结构在某一受影响的频率范围内各阶主要模态的特性, 进一步预示结构在此频段内受外部或内部各种振源作用下产生的实际振动响应, 有效避免因共振所带来的结构损伤与破坏。对于大多数结构而言, 所处的空气环境对其固有频率影响极小, 甚至可以忽略不计, 但水介质对结构模态特征影响较大。因此, 水下航行器等水下结构的模态分析必须考虑水介质的影响, 湿模态才是水下航行器结构动力学特性的真实表征。
王在铎等[1]利用释放法开展了圆柱结构在空气和水中的模态试验, 结果表明, 湿模态阻尼比比干模态增加1~2倍, 获得了该圆柱结构平动、转动及1阶弯曲的附加质量系数。李家盛等[2]基于面元法与有限元耦合算法对螺旋桨流固耦合问题进行了研究, 结果表明桨盘面来流速度对附加质量影响较小, 但对附加阻尼影响显著。陈东阳等[3]基于声固耦合法对三维柔性立管湿模态进行了研究, 考虑了静水压力和瞬态流场载荷效应, 结果表明立管湿模态频率比干模态频率小, 且随着顶张力增大而增大; 静水压力和瞬态流场载荷都使湿模态频率略微增加。陈炜彬等[4]基于声固耦合法对充水假海结构振动特性进行了分析, 水介质的存在降低了该结构的固有频率, 充水使得假海结构振动幅值变小, 也使假海结构的某些振型发生改变。刘庆茂[5]用双梁数学模型和多点正弦调力法对复合体结构在空气和水中的模态特征进行了试验研究, 结果表明附加质量是结构固有频率降低的主要因素。胡会朋等[6]利用声固耦合法对水下壳结构振动特性进行了研究, 考虑了预应力和流固耦合效应等, 结果表明流固耦合效应对结构振动特征影响较大, 随着预应力的增大, 预应力效应对水下壳体频率的影响也逐渐增大。李平书等[7]基于虚拟质量法对不同流体介质中的导流管进行了湿模态数值研究, 分析了不同湿模态算法的计算效率与准确性。李继世等[8]研究了流体因素对结构湿模态的影响, 结果表明流速对管路湿模态影响与边界条件、振型和管路轴向伸长等有关。张希恒等[9]基于声固耦合法与流固耦合法对深海阀门湿模态振动特征进行了研究, 建议在工程实际中优先采用声固耦合法进行水下结构湿模态分析。
上述文献对结构湿模态特征的研究主要考虑结构在无限流域中, 对带自由液面结构湿模态研究较少。文中基于声固耦合法, 建立了某壳体结构浅水湿模态仿真模型, 分析了浸水深度变化对其模态特征的影响, 开展了该壳体结构湿模态试验, 通过与试验结果的对比分析, 验证了浅水结构湿模态仿真模型的有效性。
1 湿模态计算方法
1.1 湿模态数学模型
假设流体是均匀无粘、无旋的理想流体, 并限于线性小扰动情况。采用有限元法对流场和结构进行离散化处理, 可得周围充满液体结构系统无阻尼自由振动方程


由式(2)和式(3)可得

由虚功原理[4]得

将式(5)代入式(1)得

式(6)是考虑流体作用下的结构振动方程, 可通过该式进行结构湿模态特征分析。
1.2 无限域与带自由液面物体的附加质量数学模型
物体在流体中做加速运动时, 物体周围的流体由于受物体的扰动也产生了加速度, 使流体加速的这部分力必然反作用于物体上。这部分反作用力可以形象地用附加惯性力或附加质量力来描述, 具有质量量纲的称为附加质量。无限域中物体的附加质量[10]为


带自由液面物体的附加质量[10]为

1.3 声固耦合法
采用声固耦合法进行湿模态分析时, 将结构附加的流体看成一种声学介质, 即一种弹性介质, 只需考虑流体体积应变的压力, 不考虑流体的粘性力。当结构振动时在流固交界面上对流体产生负载, 同时声压会对结构产生一个附加力, 为准确模拟这种情况, 需同时计算结构动力学方程和流体的波动方程, 确定交界面上的位移和声压值。
将流体方程离散化分成若干个有限元, 用相应的插值表示单元的声压和质点位移等, 可得到完全耦合的结构流体运动方程为

在分析中不考虑阻尼, 故将式(9)写为

2 结构湿模态仿真与试验及分析
2.1 湿模态仿真模型
以某航行器壳体结构为原型, 在不影响结构刚度、质量特性的前提下进行简化。由于舵板质量与表面积占航行器总质量与表面积均小于2%, 且对结构整体刚度、质量和附加质量影响较小, 建模时予以简化。此外忽略航行器壳体上螺孔、密封圈、卡箍等结构, 直接以密封壳体形式建立航行器壳体结构模型, 该航行器耐压壳体结构有限元模型如图1所示。

图1 耐压结构模型
根据试验用水槽建立水域模型。该水域长为10 m, 宽为1.5 m, 密度设置为1 000 kg/m3, 体积模量为2.14 GPa。通过布尔运算将壳体结构占用空间部分切除。将水域和壳体结构模型组装, 得到声固耦合计算模型如图2所示。利用该计算模型分析了50 mm、80 mm、100 mm和150 mm等水深下该壳体结构的湿模态特征。
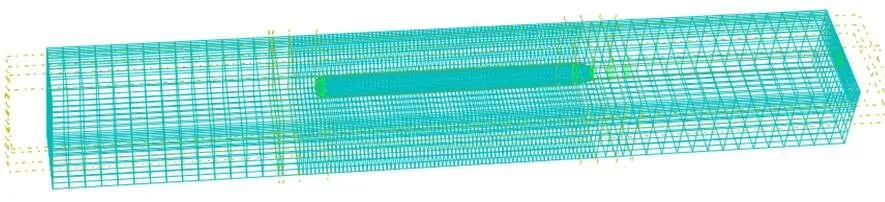
图2 声固耦合计算模型
计算时水域采用声学单元。为确保计算精度, 对壳体结构附近的水域进行局部网格加密, 远离壳体结构水域网格适当稀疏。流固交界面满足“全沾湿、无滑移”假设, 将处于流体与结构交界面上的单元自由度完全绑定。采用Robin边界条件模拟试验水池的壁面, 此时质点运动速度和声压的相互关系是确定的。在该边界可得方程

2.2 湿模态试验
采用弹性绳悬挂方式模拟该壳体结构的自由-自由状态。首先用2根橡皮绳将其悬挂在试验架上(如图3所示)开展干模态试验;采用配重加弹性绳悬挂方式模拟该结构在水中的自由-自由状态(如图4所示)。为使悬挂系统的影响尽可能小, 悬挂点处于或者尽可能地接近所关心的前几阶模态振型节点。此外, 柔性悬挂系统的频率应小于试验件1阶固有频率的1/10。经仿真预示, 干模态悬挂点距离壳体头部分别为0.82 m和2.62 m;湿模态悬挂点在干模态的位置附近做了适当调整, 以便壳体结构在水池中保持水平。

图3 干模态试验

图4 湿模态试验
湿模态试验时采用猝发随机激励, 只采用一部分随机信号, 能够满足快速傅里叶变换(fast Fourier transform, FFT)的周期性要求, 避免功率泄露。
综合数值仿真分析与预备性试验, 依据测试点布置在振型幅值较大的位置且避开壳体结构局部变形较大区域的选择原则, 在壳体结构布置5圈+头部顶点, 每圈沿圆周均布4个测点, 共计21个测点, 如图5所示。采用比利时LMS公司开发的PolyMax[11]对模态试验数据进行分析, 获得干、湿模态试验的模态信息。
2.3 仿真与试验结果分析
表1给出了数值计算与试验所得壳体结构干模态频率, 从中可以发现, 该壳体结构前4阶频率数值计算与试验之间的误差均小于5%, 满足工程精度, 也证明了所建有限元模型的有效性。
该壳体结构在浅水工况下不同水深的湿模态频率如表2~表6所示。从表中可以发现, 该壳体结构的前3阶湿模态频率与试验之间的误差均小于5%; 第4阶频率与试验之间的误差相对较大, 在0 mm、100 mm和150 mm这3种工况下, 其误差均超过5%。

图5 模态测试点布置示意图
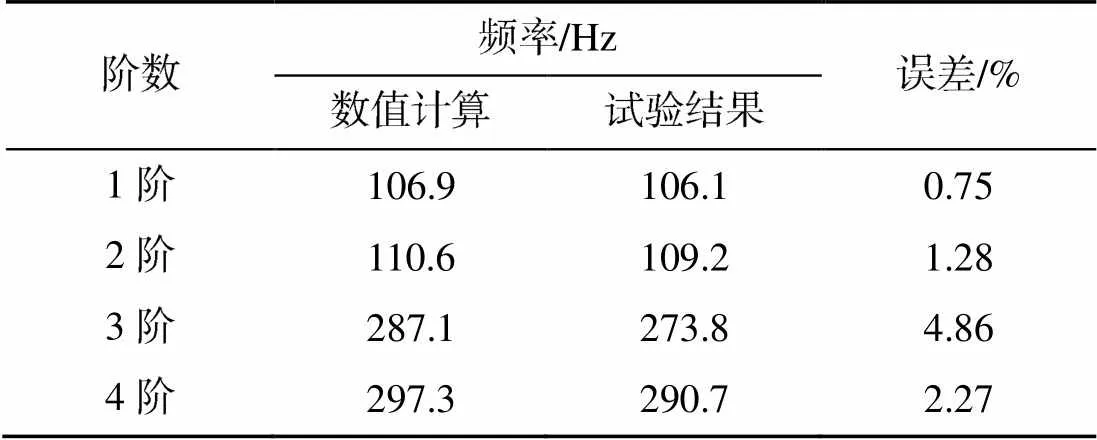
表1 干模态计算与试验结果对比

表2 水深0 mm湿模态计算与试验结果对比

表3 水深50mm湿模态计算与试验结果对比

表4 水深80 mm湿模态计算与试验结果对比

表5 水深100 mm湿模态计算与试验结果对比
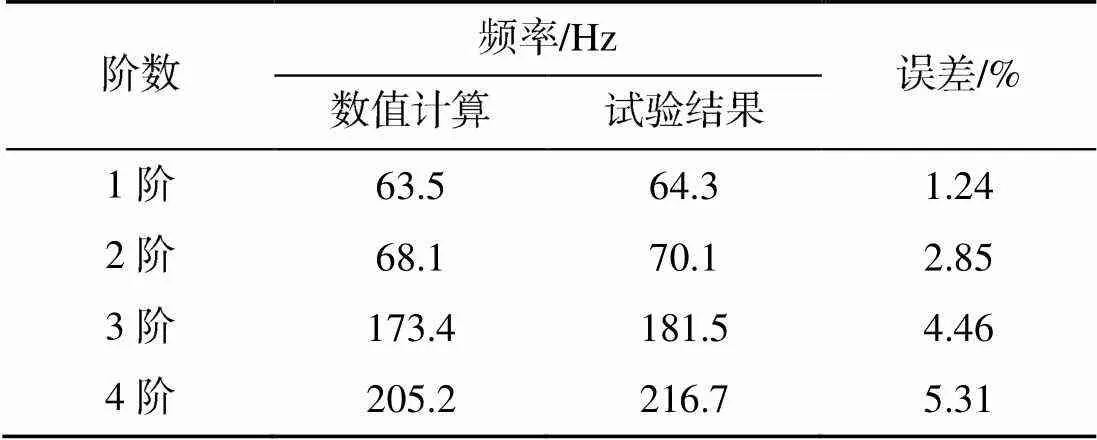
表6 水深150 mm湿模态计算与试验结果对比
该壳体结构模态频率随结构浸水深度的变化如图6所示, 图中横轴-50 mm对应的频率为干模态频率。从图中可以发现, 壳体结构湿模态频率随水深增加而逐渐减小, 浸水深度在0~50 mm时湿模态频率衰减较快, 在50~150 mm时衰减较慢, 最终趋于稳定值。与干模态试验结果相比, 湿模态频率下降了17.5% ~ 39.4%; 相同浸水深度下低阶湿模态频率的下降百分比大于高阶, 例如在浸水深度150 mm时, 1阶湿模态偏离下降了39.4%, 4阶下降了25.5%。图7为该壳体结构模态试验所得模态阻尼比随浸水深度的变化特征。从图中可以看出, 实测湿模态的各阶阻尼比在1.06% ~ 2.71%之间, 是干模态的2~8倍, 且随浸水深度无明显变化规律。
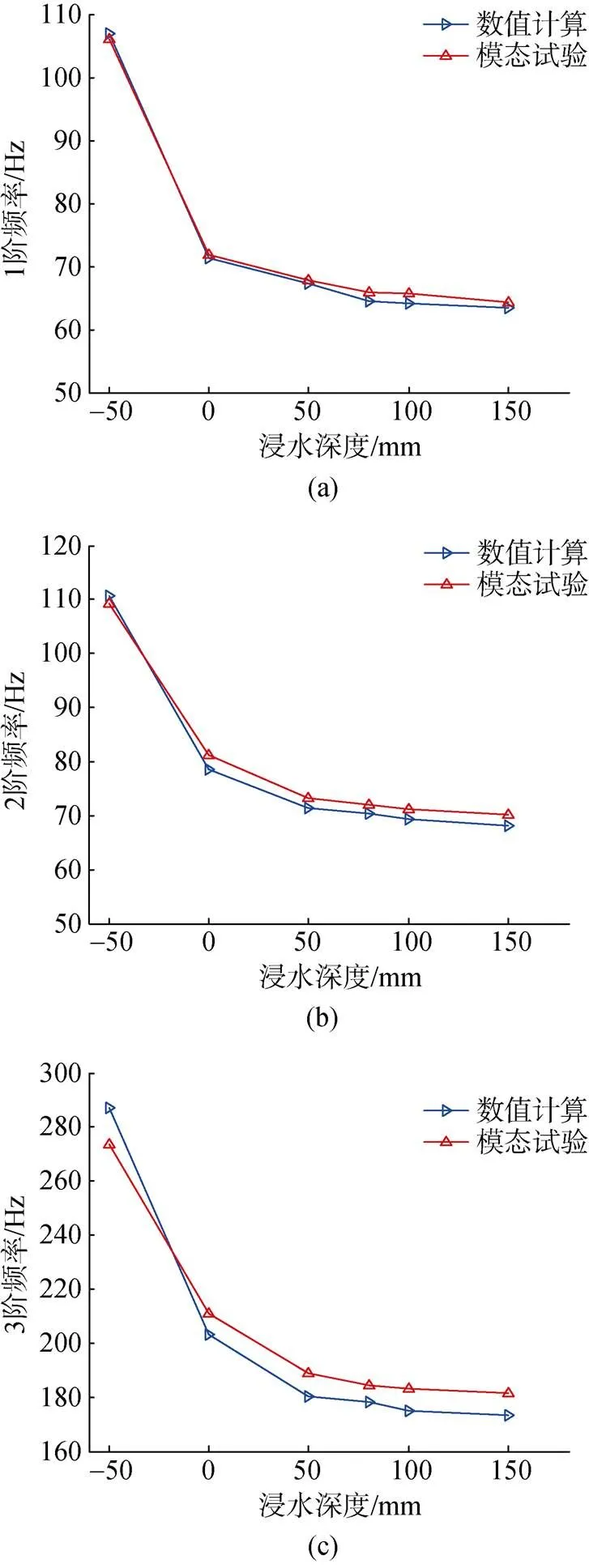

图7 模态阻尼比随浸水深度变化曲线
图8给出了浸水深度为150 mm时数值计算与模态试验所得振型对比图。从图中可以看出, 数值计算的1阶和2阶模态振型与试验振型形状吻合良好; 3阶和4阶模态振型形状吻合度较差。这是由于该壳体结构的1阶和2阶振型形态相对简单, 需要较少测点就能将其准确描绘出来; 而3阶和4阶模态振型形状相对更加复杂, 需要更多的测点才能够将它们的形态准确描绘出来, 受条件所限试验时仅有21个测点, 故模态试验3阶和4阶振型吻合度相对较差。
3 结束语
基于零声压自由液面仿真技术, 建立了某壳体结构浅水湿模态数值仿真模型, 分析了不同浸水深度下壳体结构的湿模态特征, 并开展了该壳体结构的湿模态试验, 通过仿真与试验的对比分析, 验证了所建浅水湿模态数值仿真模型的有效性。后续需要进行壳体结构1/4浸水、半浸水以及3/4浸水等湿模态数值计算与试验研究, 以获得结构浅水湿模态更加完整的模态特征。
[1] 王在铎, 马斌捷, 贾亮, 等. 水下附加质量及阻尼的试验研究[J]. 强度与环境, 2018, 45(3): 15-19.
Wang Zai-duo, Ma Bin-jie, Jia Liang, et al. Experimental Study of Added Mass and Damping in Water[J]. Structure & Environment Engineering, 2018, 45(3): 15-19.
[2] 李家盛, 张振果, 华宏星. 基于有限元和面元法的弹性螺旋桨流固耦合分析[J]. 振动与冲击, 2018, 37(21): 14-21.Li Jia-sheng, Zhang Zhen-guo, Hua Hong-xing. Hydro- elastic Analysis for Dynamic Characteristics of Marine Propellers Using Finite Element Method and Panel Method[J]. Journal of Vibration and Shock, 2018, 37(21): 14-21.
[3] 陈东阳, Laith K A, 王国平, 等. 流场环境对柔性立管湿模态的影响[J]. 哈尔滨工程大学学报, 2017, 38(10): 1587-1594.Chen Dong-yang, Laith K A, Wang Guo-ping, et al. Influence of Flow Field Environment on Wet Modal Vibration of Flexible Riser[J]. Journal of Harbin Engineering University, 2017, 38(10): 1587-1594.
[4] 陈炜彬, 段浩, 王云. 基于声固耦合算法的发射模拟试验承压结构湿模态分析[J]. 水下无人系统学报, 2017, 25(4): 365-370. Chen Wei-bin, Duan Hao, Wang Yun. Wet Modal Analysis of Pressurized Structure in Launcher Simulation Experiment Based on Sound-Structure Coupling Algorithm[J]. Journal of Unmanned Undersea Systems, 2017, 25(4): 365-370.
[5] 刘庆茂. 复杂结构水下模态试验研究[J]. 导弹与航天运载技术, 1997, 228(4): 23-29. Liu Qing-mao. Modal Test Investigation of Complex Body Structure in Water[J]. Missile and Space Vehicles, 1997, 228(4): 23-29.
[6] 胡会朋, 卢丙举, 秦丽萍. 预应力和流固耦合效应对水下壳结构振动特性影响研究[J]. 舰船科学技术, 2017, 39(8): 47-50.Hu Hui-peng, Lu Bing-ju, Qin Li-ping. The Study of Effects of Pre-stress and Fluid-Solid Interaction Effect on Vibration Properties of Underwater Shell Structures[J]. Ship Science and Technology, 2017, 39(8): 47-50.
[7] 李平书, 蔡诗剑, 吴佳蒙. 导流管模态分析方法及论证[J]. 船海工程, 2019, 48(4): 12-15.Li Ping-shu, Cai Shi-jian, Wu Jia-meng. Modal Analysis Method and Demonstration of the Nozzles[J]. Ship & Ocean Engineering, 2019, 48(4): 12-15.
[8] 李继世, 张大义, 王立, 等. 考虑流体介质影响的管路模态特性分析[J]. 航空动力学报, 2019, 34(3): 671-677.Li Ji-shi, Zhang Da-yi, Wang Li, et al. Modal Characteristic Analysis for Pipelines Considering Influence of Fluid Medium[J]. Journal of Aerospace Power, 2019, 34(3): 671-677.
[9] 张希恒, 李宏刚. 深海阀门湿模态振动特性的研究[J]. 甘肃科学技术, 2018, 30(2): 114-118.Zhang Xi-heng, Li Hong-gang. Study on Vibration Characteristic of Deep Sea Valve under Wet Modal[J]. Journal of Gansu Sciences, 2018, 30(2): 114-118.
[10] 王恭义. 物体在带自由表面的流体中作任意运动的附加质量[D]. 大连: 大连理工大学, 2007.
[11] Peeters B, Auweraer H V, Guillaume P, et al. The PolyMax Frequency Domain Method: a New Standard for Modal Parameter Estimation[J]. Shock and Vibration, 2004(11): 395-409.
Numerical Simulation and Test of Wet Modal for Shell Structure in Shallow Water
QIN Li-ping1,2, HU Hui-peng1,2, LI Zhi-tao1,2, ZHAO Shi-ping1
(1. The 713 Research Institute of China Shipbuilding Industry Corporation, Zhengzhou 450015, China; 2. Henan Key Laboratory of Underwater Intelligent Equipment, Zhengzhou 450015, China)
The modal characteristics of the vehicles’ structure in shallow water directly affect the dynamic response of it in water-exit. A wet modal simulation model of shell structure of undersea vehicle in shallow water is established based on the acoustic-solid coupling method, and the influence of the change of immersion depth on the wet modal characteristics of the structure is analyzed by using the zero-sound pressure free surface simulation method. The wet modal test system of this shell is designed and built, and the wet modal feature information of this model is obtained by using PolyMax method. Comparison between simulation and test results shows that the simulation results are in good agreement with the test data, which verifies the validity of the wet modal simulation model and suggests its applicability to the wet modal analysis of structure in shallow water. In the condition of shallow water, the wet modal frequency of this shell decreases gradually with the increase of the immersion depth, and then tends to a stable value. The damping ratio of wet modal is 2 to 8 times that of the dry modal, and there is no obvious dependence on the immersion depth.
undersea vehicle; shell structure;wet modal; modal test; acoustic-solid coupling; shallow water
TJ630.3; TB34
A
2096-3920(2020)04-0389-07
10.11993/j.issn.2096-3920.2020.04.006
2019-11-15;
2020-01-03.
秦丽萍(1977-), 女, 研究员, 主要研究方向为水下发射技术.
秦丽萍, 胡会朋, 李治涛, 等. 壳体结构浅水湿模态数值仿真及试验[J]. 水下无人系统学报, 2020, 28(4): 389-395.
(责任编辑: 许 妍)
