一种矢量水听器浮标补偿角挑选方法
2020-08-29李韦华李玲燕
李韦华,李玲燕,谭 鑫
(1. 中国人民解放军91439部队,辽宁 大连116041;2. 中国人民解放军91054部队,北京102442)
0 引言
鱼雷弹道的测量经常需要用到矢量水听器,一般利用多个矢量水听器组成测量基阵,被动接收鱼雷航行噪声[1]。矢量水听器浮标作为一种水下目标测向定位设备,校准的准确性对于其保障可靠性非常重要。然而,浮标平台尺寸限制其不能在平面驻波场中得到校准,工作频率范围限制其不能在消声水池自由场中得以完整校准,因此,寻求一种可以系统地校准矢量水听器浮标的参数的方法非常必要。而矢量水听器浮标在海上试验时一般需用到真方位、声学方位、罗经值3个参数,但罗经安装过程中很难正对大地坐标系正北方向,海上试验前一般都需要校准,通过校准对声学方位进行补偿[2]。在开阔的水域校准矢量水听器浮标可以不受平台尺寸和频率范围的影响,但声场环境更为复杂,本文利用海上校准数据对校准原理及过程进行了描述。
1 矢量水听器浮标校准原理
1.1 矢量水听器测向原理
矢量水听器浮标平台通常由完成测向功能的测向组件和其它辅助配件搭建而成,测向组件一般包括矢量水听器(声压通道、矢量通道)、磁罗盘和信号处理板卡等组成,各部件的参数特性和侧向处理方法都会影响测向精度。传统的水声信号处理技术仅仅是声压信号处理技术,而联合处理声压和振速信息的信号处理技术是矢量信号处理技术。尽管声压和振速可以通过尤拉方程相联系,但声压和振速均不能单独决定声场的全部特性。尤其在复杂声场环境下,在实际工作中,声信号总会受到噪声的污染,用这种被污染的信号估计目标方位,必将不同程度地引进估计误差。这时候矢量信号处理就体现出了优越性,因为利用矢量信号处理技术可以有效避免噪声干扰[3]。
在满足声学欧姆条件下,可得到下式

在平均声强器的组成中,ps、vs的下标表示目标信号,目标信号满足欧姆定律,目标信号为x(t),得到上述诸式。nx、ny、np与x(t)相互独立。再对式(1)作时间平均,可以看出平均声强器的输出为

由于nx、ny、np与x(t)相互独立,因此在高信噪比时,上式右边只有括号中的第一项之积是主要的。有:
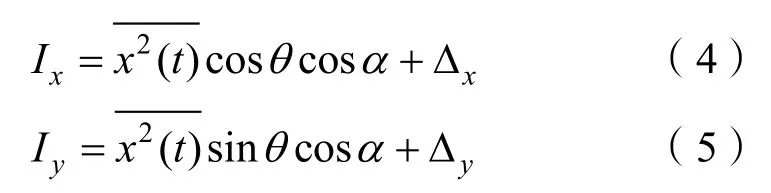
式中:Δx、Δy可忽略,(4)、(5)两式相除,得到:

式中:表示目标方位θ的估计,单个矢量传感器可以用该式估计目标方位,即声学方位。
1.2 矢量水听器浮标组成
矢量水听器浮标平台通常由完成测向功能的测向部件和其他辅助配套组件组建而成,测向部件通常包括矢量水听器(含声压通道和矢量通道)、磁罗盘和水声信号处理机,其他辅助配套组件包括高精度 DGPS、压力传感器、浮体、无线通信电台和电缆等。其中,矢量水听器通常有 1路声压P通道和3路(C3维)或2路(C2维)相互正交的矢量通道,主要完成对声信号的接收并转换成电信号,磁罗盘完成矢量水听器姿态的监测并输出姿态信息,水声信号处理机完成对矢量水听器输出的电信号的放大、滤波、采集及测向处理等功能[4]。
浮标系统中矢量水听器各通道都有独立的前置放大、滤波、采集电路,这些后级电路的幅频、相频特性由于受电子元器件的个体差异影响而不尽相同。因此,在浮标平台中,矢量水听器的灵敏度、指向性、幅度相位不一致性等参数应连同各自通道的后级电路一起校准,与单纯的矢量水听器的参数指标校准通常会有一定的差异。矢量水听器浮标海上校准准确与否,主要取决于矢量水听器的测向结果,而该结果的主要影响因素有水听器电声参数、信号检测能力、磁罗经、信噪比等4个因素。
1.3 海上校准方法
一般校准,认为当声信号入射方向不同时,矢量水听器声学 0°与罗经正北夹角存在小幅变化,试验实施方法为动态校准,即试验中将待校准浮标布放于某一位置,测量母船带基站、声源在距浮标1~2 km距离上慢速绕浮标运行1、2圈。通过算法计算每 1°上的校准角,海上校准各角度示意图,如图1所示。但该方法不能保证GPS天线和水下发射换能器在同一铅垂线上。
此时,补偿角=真方位+声学方位+罗经值,其中,各角度坐标系定义如下。
世界坐标系(Xw,Yw):在较小区域内,认为海面为平面,定义正东方向为x轴正向,正北为y轴正向。极坐标0°与x轴重合。
浮标声学坐标系(Xv,Yv):为极坐标系,极坐标0°与矢量水听器0°(Xv)重合。
真方位:世界坐标系下,由浮标 GPS指向基站GPS的射线,与极坐标0°的夹角。
声学方位:浮标声学坐标系下,由浮标水听器指向基站声源的射线,与极坐标0°的夹角。
罗经值:世界坐标系下,罗经0°与正北的夹角。
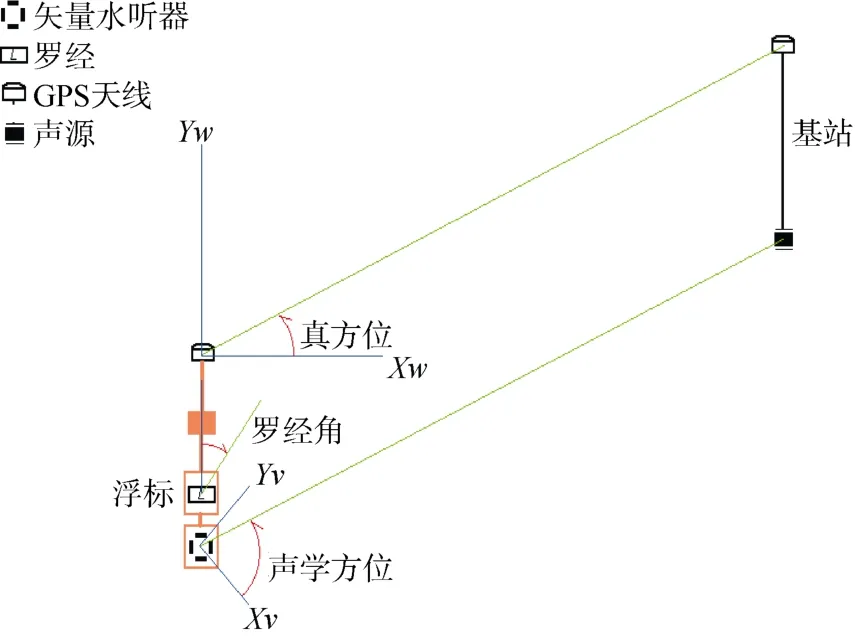
图1 海上校准各角度示意图Fig. 1 Schematic diagram of various angles for offshore calibration
2 校准结果分析
考虑到校准角=真方位+声学方位+罗经值,在海上校准过程中,声学方位、罗经值可通过浮标数据采集端进行采集并上传至工作母船[5-7];真方位可以通过浮标与声源 GPS计算取得。一般对浮标校准需拖带声源在距浮标 1~2 km 距离上慢速绕浮标转圈,以每一圈为一个条次,然后计算补偿角。本文以其中一个条次的数据为例,阐述计算过程。
如图2,我们给出了测量时间内,所有的真方位、声学方位、罗经值、补偿角,从图中可知:一部分补偿角落到 360°范围外,这里,我们人为的将角度修正到360°内,方便使用,如图3。
在实际浮标使用中,补偿角仅为一个,因此,我们需要挑选出最适合的一个角度。如图4,我们将修正后的所有补偿角按照大小排列出来,可以看到补偿角从60°左右到110°均有分布。如图5,我们采用直方图的方法进行挑选,即将所有补偿角分为 500等份,计算每一等份内补偿角样本数,在150~400等份内的分布较多,我们挑选样本数最多的一个分布空间作为最终结果,即73.660 8°。

图2 真方位、声学方位、罗经值、补偿角Fig. 2 True azimuth,acoustic azimuth,compass value and compensation angle

图3 修正后补偿角Fig. 3 Corrected compensation angle

图4 补偿角按大小排列结果Fig. 4 Arrange of compensation angle by size
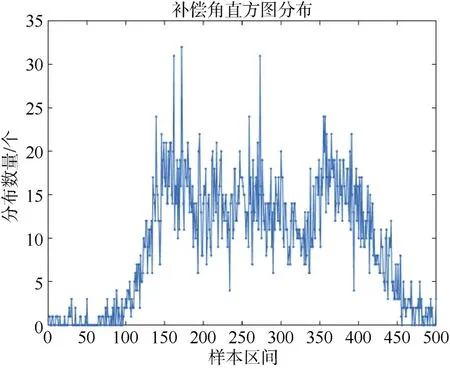
图5 补偿角直方图分布Fig. 5 Histogram distribution of compensation angle
3 结束语
本文从矢量水听器定位原理出发,详细阐述了海上校准的过程,并对其中一条次的数据进行了计算演示。通过对校准数据的分析处理,归纳总结出以下几点问题。
1)干扰噪声对校准影响大。
海上校准时经常会遇到渔船、商船的干扰,而噪声干扰会直接影响校准过程,在遇到噪声干扰时,应及时停止测量,等待干扰消失[8]。
2)声源位置测量的正确性对校准影响大。
校准过程中,真方位的计算是由声源位置与浮标位置计算得到,但拖带声源绕圈过程中,声源与拖船采用绳子连接,其位置的测量不够准确,如果改用刚性连接,可以提高位置精度[9]。
3)海上校准方法设计仍有改进余地。
本文采用的方法为,将待校准浮标布放于某一位置,拖带声源在距浮标1~2 km距离上慢速绕浮标运行一、两圈,也可以每隔10°定点吊放声源对矢量水听器进行校准。
