基于声呐图像的水雷目标检测技术简述
2020-08-29胡红波梅新华
胡红波,梅新华
(1. 海装驻宜昌地区军事代表室,湖北 宜昌 443003;2. 中船重工鹏力(南京)大气海洋信息系统有限公司,江苏 南京 210000)
0 引言
水雷以其目标小、噪声低、隐身性能好、使用灵活、破坏力大、代价小等特点,一直是封锁敌人和保卫自己的主要手段,可以实施远程封锁、阻断海运贸易、切断或占领近海能源基础设施,对于动摇民心、摧毁战争意志、威慑敌方等具有重要意义,在历次的海战中扮演着重要的角色。
在反水雷作战样式中,猎雷是其中重要手段之一,是各反水雷强国纷纷大力发展的技术,而水下目标图像检测识别技术是其中关键核心技术,对于提升猎雷装备探测识别效率具有十分重要的意义。
1 水雷状态分析
水雷作为重要的水下防御手段,其功能也在不断提升,从初始的被动防御向主动防御转变,其主要特点总结包括“远、准、隐、动、快、久、抗、深、智、廉”等。
相对于光波、无线电波,声波在水下衰减小、探测距离远,一直是水下目标探测的主要手段。由于水雷等目标静止或在水下微动,且不会主动向外部辐射信号,需要发射主动信号照射并接收其激励产生的回波,达到目标检测识别的目的。以水下侧扫成像为例,即使是同一个目标在不同距离、不同方向探测可能都呈现不同的结果,给AUV自主探测和识别带来了挑战。
图1为某型AUV上携带的声呐对不同圆柱形水雷的响应(全扫宽声呐图像上剪下的10 m×10 m的图像)。3幅图像到目标的距离分别为43 m、80 m和130 m。
从1999 年至今,法国大西洋水下研究集团一直研究新型声呐系统对掩埋目标的探测可行性。迄今为止猎雷声呐系统无法有效地对付掩埋在沉积层中的水雷(如图2)。


图1 侧扫声呐不同角度和距离成像结果Fig. 1 Image of side-scan sonar wath different angles and distances
目前AUV搭载的探测设备能够对锚雷、沉底雷较好地成像,但是由于其工作频率高,对于掩埋雷探测效果不佳,传统的侧扫声呐无法有效地探测到掩埋目标,导致无法进行目标自动定位和识别,需要研发新型探测设备和目标识别算法。

图2 掩埋在淤泥中达2/3的圆柱体Fig. 2 2/3 cylinder covered by silt
2 水雷探测识别方法
传统猎雷方法包括3个阶段:探测、识别和灭雷。
1)侧扫或前视声呐探测到目标回波后,采用识别软件判断其为可疑目标;
2)如果判断可疑目标,则利用 ROV 或蛙人进行进一步视觉识别;
3)如果确定目标为水雷,立即进行灭雷。
传统探测方法需要不同的探测设备和人在回路,存在工作流程复杂、探测效率低、安全性差等问题,发展具有水雷目标自主探测识别处理功能的AUV设备是反水雷行业后续发展的关键,其中水雷信息采集和后处理是其关键技术,直接影响其性能优劣。虽然目前声呐成像设备、电视设备等可以远距离和近距离探测水雷目标,但是其只能在形状上判断其为类似水雷目标,需要研究基于爆炸物探测能力的设备,从根本上判断探测物体是否为水雷。AUV水雷检测识别主要包括2部分内容:水雷检测传感器和信息处理算法。本文主要简述声呐图像处理算法。
声呐图像由目标高亮区、阴影区和背景区3部分组成。目标高亮区主要由声波在目标表面反射造成的区域,而阴影区是由于目标物的遮挡使得声波难以到达造成的区域。水下目标检测的目的就是要从复杂背景区中提取出目标高亮区和阴影区,并尽量保留图像原始信息。
基于传统技术的声呐图像检测识别算法主要包括如图3。
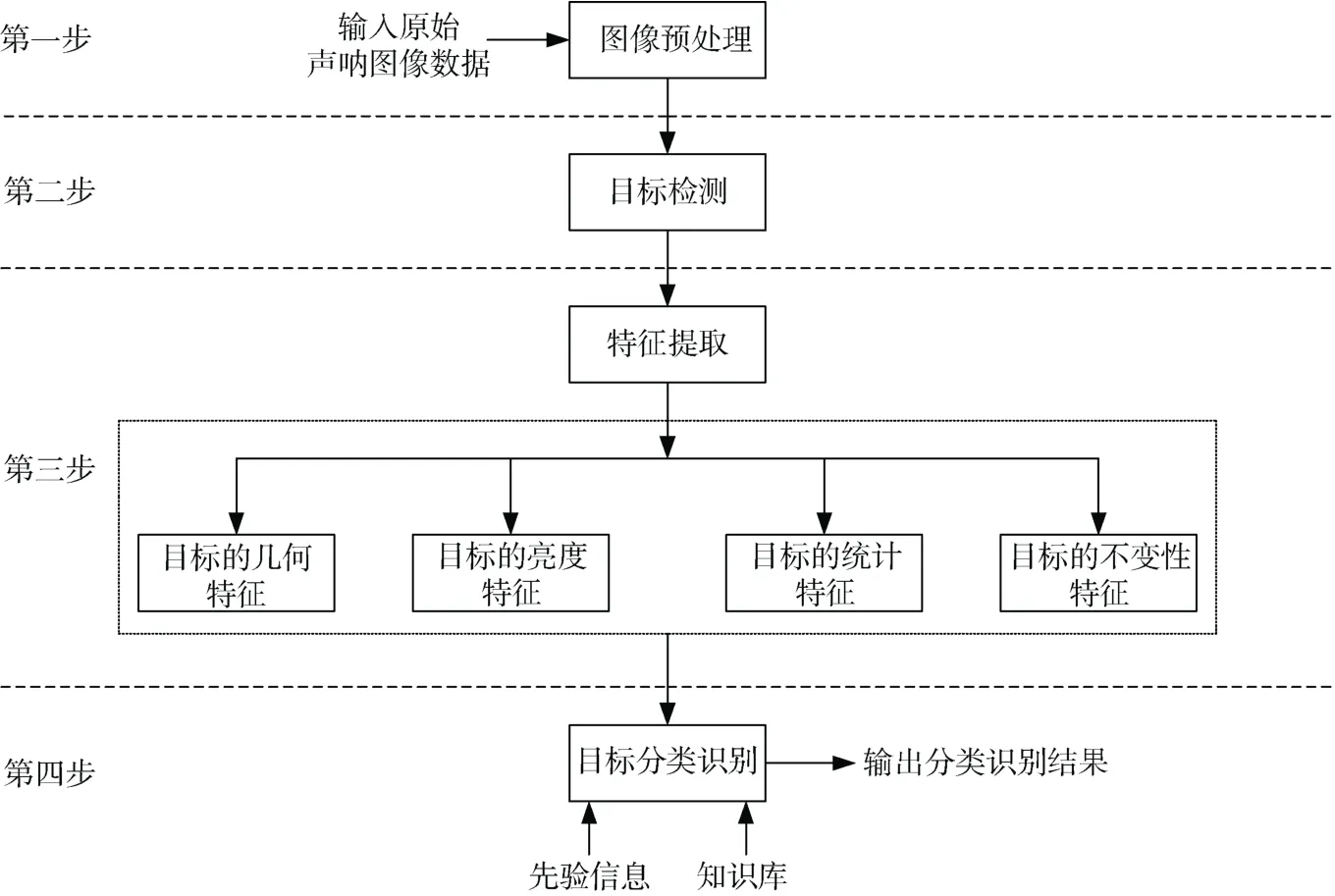
图3 声呐图像目标识别流程Fig. 3 Process of target identification by sonar images
传统算法为在采集的图像中分割出目标,针对分割后的目标完成特征提取和识别。
虽然图像分割技术已经被人们广泛使用,但是针对声呐图像分割技术的研究还相对缺乏,主要是因为混响以及各种环境噪声的影响,使得产生的图像容易失真且图像分辨率较低,增加图像分割难度。
常用声呐图像分割算法中,文献[6]-[11]研究了基于统计特性的分割算法,文献[1]、[13]研究了基于形态学的分割方法,文献[12]列出基于最大熵的分割,文献[2]、[3]、[14]、[15]列出基于分形理论的分割算法,文献[4]、[16]、[17]列出基于均值聚类技术的分割算法,文献[5]、[18]、[19]、[20]、[21]列出基于 MRF理论的分割算法,文献[22]-[29]列出基于边缘的图像分割算法等。
图像分割完成后采用特征提取技术和建立分类器完成目标识别。特征提取是指从目标图像的所有原始信息中计算并找出最有效的一组特征。文献[30]-[32]研究声呐图像特征主要包含形状、轮廓、大小、面积等几何特征,亮度、对比度等,颜色、图像矩、灰度直方图等统计特征以及尺度不变特征。特征选取往往需要进行大量的统计、比对、筛选,这是目标识别的一个难点。特征的选取和提取结果将直接决定目标识别工作的好坏。
特征分类是利用计算得到的目标特征,完成目标识别,文献[33]-[34]介绍了常用的分类器有KNN、SVM和BP网等。
虽然基于传统方法对声呐图像检测与识别进行了大量的研究,但是所有算法均处于实验室验证阶段,无法适用 AUV在真实环境下使用。但随着计算机硬件技术的发展和深度学习技术的崛起,深度学习技术也在不断地应用在声呐图像处理中,为水雷目标自主检测提供了一条新的研发思路。
基于深度学习的声呐图像目标检测识别算法流程如图4。

图4 深度学习目标识别模型Fig. 4 Deep learning model for target identification
深度学习技术不需要先将图像分割,提取图像特征后再输入到分类器完成目标识别。而是直接将原始图像输入到深度学习模型自动完成目标检测网络训练;网络收敛后,具备根据输入的原始图像自主目标检测识别能力。
文献[35]采用深度学习中迁移学习研究水下目标识别技术(其使用约 2 000张前视声呐图像,含10种不同目标,其中含有较多的水雷目标)。通过使用其他训练样本对深度学习模型进行预训练,然后使用较少的样本数量(20个样本)就可以达到90%的目标识别成功率。这同时也充分表明了深度学习在不同声呐图像目标识别方面的巨大优势,即只需要通过极少的样本进行训练就可以用于新环境下或新目标的识别。David P Wiliams等人的研究工作则更为充分,使用 2008-2015年在波罗的海、地中海、北海等海域采集的数万张合成孔径声呐图片作为数据集,使用深度学习技术进行图像目标识别,在其测试数据集上的识别成功率可达90%以上。部分训练采集时间、地点及数量如下:2008年,拉脱维亚,8 941张;2009年,意大利,2 858张;2010年,意大利,3 084张;2011年,意大利,8 951张。部分训练采集时间、地点及数量如下:2014年,意大利,6 162张;2015年,比利时,4 109张,西班牙,10 039张。总共覆盖350 km2海底,含大量水雷疑似目标。
3 结束语
由于水下环境复杂,声呐图像分辨率较低,给水雷探测识别带来了巨大的挑战。通过对基于声呐图像的水雷目标检测识别算法,包括基于图像分割、特征提取和分类的传统算法,基于深度学习智能算法的分析,为后续水雷识别算法研发提供参考,以期提高AUV目标自主探测识别能力。
1)通过20年左右不断发展,传统声呐图像检测识别算法围绕目标特征处理及变换算法开展了大量尝试,并逐步在提高识别准确率和收敛速度方面取得积极进展,为当前深度学习技术应用于水下目标识别奠定了良好的基础。
2)相对于传统声呐图像检测识别算法需要进行图像预处理,基于深度学习的目标检测识别算法直接对声呐图像开展预先训练,所需样本数量更少,收敛速度更快。
3)传统声呐图像检测识别算法基本上可以总结为一种基于人设规则的分类算法,而基于深度学习的目标检测识别算法可以实现自主学习、自主训练,是未来目标检测识别算法重要发展方向之一,可以大大提高无人自主猎雷装备的探测识别效率。
