一种无人艇自适应无线通信系统的设计应用
2020-08-29卢筑飞陈天利
卢筑飞,陈天利,王 超
(1.中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003;2.北京卫星导航中心,北京 100094)
0 引言
无人艇(USV)是一种无人操作的水面舰艇,与无人机、无人车同属于无人系统平台。无人艇由水面舰船或岸基布放回收,以半自主或全自主方式在水面航行,执行危险以及不适于有人船只作业的任务。为实现无人化、自主化控制,无人艇需配备无线通信系统,以实现无人艇与母艇(主控端)之间信息的实时交互。目前,国内外无人艇技术已经取得大的进步,在军用和民用领域,各型无人艇获得广泛应用[1]。在工程设计中,无线通信系统作为无人艇的重要构成,需根据无人艇应用场景配备合适的无线通信设备,制定有效的通信控制策略,确保无人艇作业时无线通信链路连续稳定。
1 无线通信技术发展现状
无线通信技术的发展分5个阶段:20-50年代初,无线通信技术最初在军用领域得到应用,但传输速率有限,其应用发展受到束缚;50-60年代,随着半导体技术的发展,无线通信技术开始应用到移动领域;70-80年代,随着通讯技术的进一步发展,第一代通讯系统诞生;80-90年代,第二代通讯系统诞生,电信系统得到有效发展;90年代后期至今,陆续推出3G、4G、5G移动通信技术,通信系统得到广泛应用,技术上不断升级换代。
按照传输距离,无线通信技术又可分为近距离通信和远距离通信技术。近距离通信技术主要有Zigbee、蓝牙、WiFi、NFC、UWB 等;远距离通信技术主要有微波通信、卫星通信、4G/5G通信、红外光通信、激光通信等。
在实际作业过程中,无人艇通常距离母艇较远且处于不断运动中。综合各类无线通信技术的特点,一般选用微波通信、卫星通信、4G/5G通信构建无人艇无线通信系统。其中,微波通信抗干扰能力强,适合大量的数据传输;卫星通信频带很宽,能提供高质量的信息;4G/5G无线覆盖面积大,可适用于不同用户[2-4]。
2 无人艇基本构成
无人艇主要由艇体、航行控制系统、动力推进系统、导航定位系统、环境感知系统、无线通信系统及供电系统组成,如图1所示。

图1 无人艇基本构成Fig. 1 Basic constitution of USV
航行控制系统主要实现无人艇的航行控制;动力推进系统主要为无人艇匹配主机、喷泵等动力装置;导航定位系统主要为无人艇提供精确的位置、姿态和航向信息;环境感知系统主要实现无人艇周围环境的探测和重构,为无人艇自主航行提供决策支持;无线通信系统主要为母艇(主控端)与无人艇之间,以及多艇之间提供无线通信链路,实现平台间信息的实时交互。无线通信系统主要由微波通信、卫星通信和4G/5G通信设备构成。
3 无线通信系统设计
在目前已成熟使用的无线通信设备中,适用于无人艇无线通信的设备主要有宽带无线电台、窄带无线电台、卫星通信终端、岸基 4G/5G通信设备等。其中,宽带无线电台主要用于视距范围Mb级数据的实时传输,如视频、声呐等数据的传输;窄带无线电台主要用于远距离 Kb级数据的实时传输,如语音、指令、工况等数据的传输;卫星通信终端广泛用于海上应急通信,具有覆盖区域大,通信距离远,不受地理条件限制的优点,传输速率从Byte级到Kb级。因卫星通信资源有限,一般用于应急状态下重要指令、工况和安全信息的传输;岸基 4G/5G通信范围受限于通信基站,一般用于近岸作业时无人艇信息的传输。在海上使用时,无人艇一般搭载宽带无线电台、窄带无线电台和卫星通信终端,组成无线通信系统,如图2所示。

图2 无人艇无线通信系统Fig.2 Wireless communication system of USV
3.1 宽带无线电台[1,5]
宽带无线电台一般工作在UHF频段,在一定的视距范围内可提供Mb级的数据带宽,实现主控端与无人艇之间视频图像、声呐图像、控制指令、工况等信息的传输。
1)通信距离的影响因素。
无线电波在海面传播时,视距范围内主要通过空气中的直达波和海面的反射波进行传播。在视距范围外的地球阴影区域,无线电波需考虑地球球面形成的遮挡造成的绕射损耗。因此,无线通信距离主要取决于天线的增益和架高、电台的发射功率和接收灵敏度,以及传播途径上的环境影响因素,如海浪、水面反射、遮挡等。
2)海上通信视距计算。
在电台的各种指标均足够满足要求(即无线发射功率足够大,接收机灵敏度足够高)的情况下,仅考虑地球的曲率半径、发射天线和接收天线的高度时,可按式(1)计算通信的理论距离,即通信两端天线之间的视距。

式中:R为地球的曲率半径;Ht和Hr分别为发射和接收天线离水平面的实际高度。
3)最大传输距离工程估算。
在实际工程设计中,无线通信距离需考虑无线电波在自由空间传播时存在的路径损耗,此种损耗为辐射能量扩散引起的损耗,并非受到阻挡、反射、折射、绕射、吸收等原因而产生的损耗,工程上此类损耗可采用式(2)计算。

式中:Lp为路径损耗,dB·m;d为传播距离,km;f为发射频率,MHz。在选定电台的情况下,可根据发射功率、接收灵敏度、发射频率计算允许的路径损耗,再结合公式(1)推算电台理论通信距离。
在考虑大气折射对无线电磁波传播影响的情况下,宽带无线电台的传输极限距离可以采用式(3)计算。

式中:d为传输距离,km;R为地球半径,km;Ht和Hr分别为发射和接收天线的高度,m。实际情况中,因无线电波在传播途径上存在绕射损耗和多径反射衰落,最大传输距离约为传输极限距离的70%。
3.2 窄带无线电台
窄带无线电台工作于VHF频段,传输速率一般为Kb级。其具有稳定性好、建立迅速、机动灵活等优点,主要用于较远距离时控制指令、工况、语音等信息传输。
VHF频段属于超短波,超短波在空气中传播时具有一定的绕射和穿透能力,相比UHF频段的宽带无线电台,在同样环境条件下窄带无线电台通信距离更远。因此,工程估算时,可以按3.1节中的公式(3)进行最大传输距离的计算。
3.3 卫星通信设备
卫星通信作为高速宽带通信和低速窄带通信方式的补充,可以不受地理环境、气候条件和时间的限制,在通信卫星波束覆盖区域内,均可实现远距离的数据通信。同时,卫星通信具有通信质量好、系统可靠性高、安全性强的特点。其作为应急通信手段,可用于应急状态下重要指令、工况及安全信息的传输。目前国内卫星通信设备主要有北斗通信终端和天通通信终端。其中,北斗通信速率较慢,一般为数十字节每分钟;天通通信速率较快,最大可达百Kb级[6]。
4 自适应无线通信系统
为满足无人艇在不同应用场景作业的需求,大部分情况下无人艇无线通信系统应具备接入宽带无线通信、窄带无线通信、卫星通信等通信设备的能力。本文提出一种自适应无线通信系统的设计方案,采用智能监控模块将3种通信设备进行融合。自适应无线通信系统根据无人艇和通信设备的状态变化自主切换无线通信网络,保持主控端与无人艇间无线网络的连续稳定链接。自适应无线通信系统组成如图3所示。
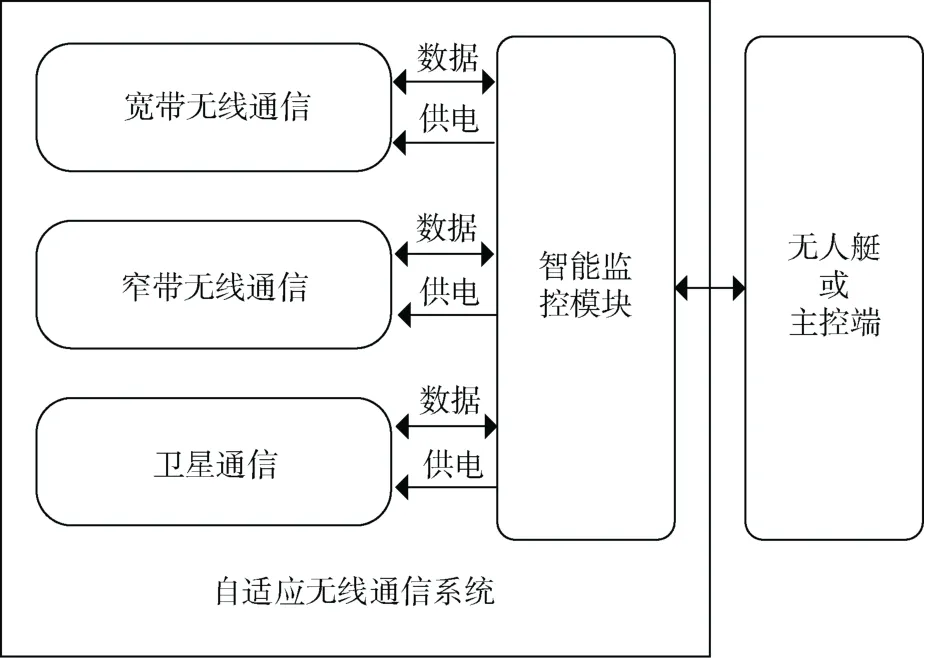
图3 自适应无线通信系统Fig. 3 Adaptive wireless communication system
自适应无线通信系统通过智能监控模块将宽带无线通信、窄带无线通信和卫星通信设备接入无人艇或主控端。智能监控模块作为自适应无线通信系统的控制核心,为无线通信设备提供标准通信接口,具备接入多种通信设备的能力,并对各通信设备的工作状态进行实时监控。该模块按用户定义机制自主切换通信链路,保证无人艇作业时与主控端之间的无线通信链路连续不中断,重要信息可实时交互。
4.1 智能监控模块组成
智能监控模块主要由微控制器、状态监控、数据交换单元组成,如图4所示。智能监控模块的数据交换单元为各无线通信设备提供标准通信接口,状态检测单元对各个端口的通信状态进行监测,微控制器根据检测结果决定接入无人艇或主控端的无线通信设备,自主建立稳定的无线通信链路。

图4 智能监控模块Fig. 4 Intelligent monitoring module
4.2 无线通信链路切换
在智能监控模块中,采用预切换机制实现无线通信链路之间切换。在当前无线链路未断开之前,预接入系统的无线通信设备即开始接入无人艇或主控端网络的操作。在预切换机制下,状态监测单元检测到当前无线网络的链路质量低于预切换阀值时,立即向微控制器单元发送切换事件消息,微控制器单元接收到事件消息后激活预接入无线通信设备的端口并开始连接无人艇或主控端网络,在当前无线网络链路断开之前完成无线链路的切换。预切换机制可有效减少切换过程中的数据丢包。无线通信链路预切换机制的具体实现步骤如图5所示[7-8]。
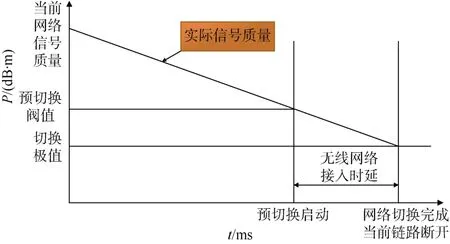
图5 无线通信链路预切换机制Fig. 5 Wireless communication handover mechanism
5 系统测试
在无人艇设计时,按设计要求选择适合的宽带无线电台、窄带无线电台和卫通设备接入智能监控模块,组成无人艇自适应无线通信系统。
测试场景:试验时,主控端自适应无线通信系统放置在岸边,主控端和无人艇端的天线按设计要求架设到指定高度。同时,按用户定义策略对两端的自适应无线通信系统进行配置。首先进行近距离通信测试,系统工作正常后,无人艇由近及远航行,开展通信系统的拉距测试。在近距离时,主控端可接收到宽带无线电台传输的图像、指令、工况等信息;当试验船超出宽带无线电台通信距离时,系统自主切换到窄带通信链路,主控端接收到窄带无线电台传输的指令、工况信息;当试验船超出窄带无线电台通信距离后,系统自主切换到卫星通信链路,主控端接收到卫通传输的应急指令和工况信息。测试状态如图6所示。
试验结果表明,自适应无线通信系统能够根据宽带无线电台、窄带无线电台、卫星通信设备以及无人艇的工作状态进行通信链路的自主切换。试验中,无线通信链路可按用户定义自主切换,切换过程中通信信息可连续实时交互。
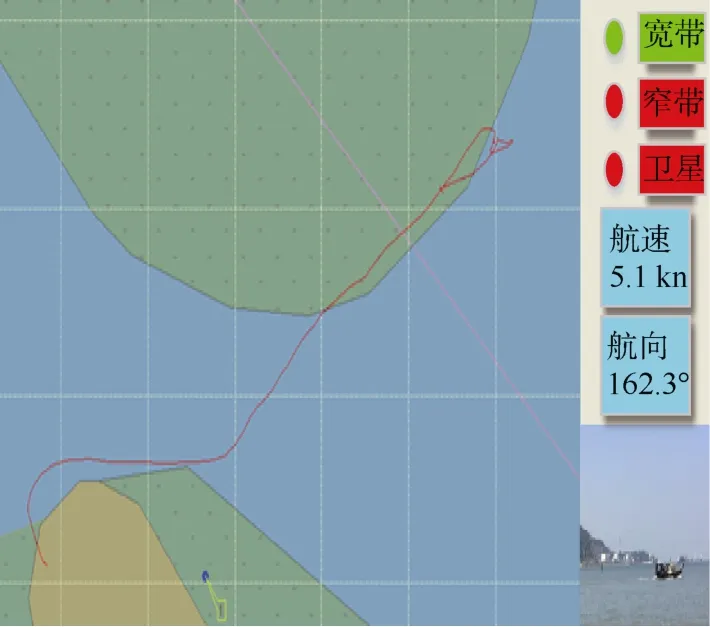
图6 自适应无线通信系统测试结果Fig. 6 Test result of adaptive wireless communication system
6 结束语
本文从无线通信技术的发展现状出发,分析了当前常用无线通信技术的特点,并结合无人艇的实际应用场景,构建了基于微波通信、卫星通信等通信设备的无人艇无线通信系统。本文对各通信设备的适用场景、通信距离计算方法进行了详细介绍,并提出一种自适应无线通信系统,实现不同无线通信设备之间通信链路的自主切换,确保无人艇通信链路连续稳定。该系统采用标准通信接口,具有良好的扩展性,可满足无人艇在多种应用场景中对无线通信系统的需求。
