基于颜色和纹理特征的森林火灾图像识别
2020-02-12李巨虎范睿先陈志泊
李巨虎 范睿先 陈志泊
(北京林业大学 信息学院,北京 100083)
森林火灾是对环境和经济发展影响范围最大、破坏性最强的灾害之一。对森林火灾进行预警和扑灭,可以减少人员伤亡和森林资源损失。目前所采用的人工瞭望、飞机航测、卫星监测等方式时效性低、经济成本高,难以满足实时林火预警需要。随着计算机视觉发展,基于图像识别的视频监控技术逐渐成为森林火灾监测预警的主要方式。
有些学者使用颜色空间规则进行火焰识别,具有较好的识别效果;但是仅仅通过颜色空间规则提取火焰特征,较为片面,丢失了部分特征,使得结果有局限性。例如Poobalan等[1]设计了基于RGB和HSL滤波器的火焰探测算法;Bakri等[2]分别在RGB和YCbCr颜色空间制定规则,将满足规则的火像素与背景分离;Wang等[3]提出了基于蓝色分量的火灾识别模型,通过绘制大量样本图像的ROC曲线来确定关键阈值,实验可以消除部分噪声干扰,但提取特征方式依然较单一;Ganesan等[4]提出了改进的模糊C均值聚类方法,在RGB和CIELab颜色空间上进行实验,该方法在高分辨率卫星图像的森林火灾检测与分割中有较好表现,但方法受到图像质量限制。
还有很多学者使用多特征火焰检测方法,火焰特征提取更加全面,但是适用于室内火灾检测,没有在森林等开阔复杂的环境中实验。例如Wang等[5]提出基于火色分量的火灾探测模型,利用连续视频帧的相似度,提出了基于检测区域火焰运动特征的跟踪算法,取得了不错的效果;Shi等[6]利用RGB-HIS模型检测出与火焰相似的区域,通过识别连续图像质心变化检测火焰,从而区分出火焰状干扰源(如毛巾、手电光、反光金属、强自然光等);Gunawaardena等[7]使用自适应背景减法检测前景移动对象,通过颜色规则确定检测的前景对象是否为火焰,利用YCbCr颜色空间对火灾像素进行建模分类,在时间域分析火灾候选区域,以检测火焰闪烁,并区分火焰与干扰物。
有些学者在进行火焰识别时,没有对火焰状干扰源进行区分,容易产生虚假报警。例如Zhang等[8]利用像素变化和轮廓信息变化提取特征,并利用群体隐性马尔可夫模型区分出火焰闪烁与近似火焰物体移动方式不同,比较了火光与人造光的频率成分,但是没有对自然强光及其它类似火焰物体进行对比验证,实验也仅仅基于6段视频,场景较单一,不具有普遍性;Asatryan等[9]提出了基于RGB颜色空间的图像完全分割和简化方法,分析了3种类型区域:包含有火、包含有烟和没有烟和火的区域,但是没有对火焰状干扰源进行对比实验,另外RGB颜色空间不能分离亮度和色度分量,该结果容易受图像亮度影响,对烟雾的检测率较低,只有80%左右。
还有学者对近似火焰图像做了对比分析,但是没有考虑森林中易与火焰混淆的红叶。例如Vijayalakshmi等[10]基于HSV模型消除非烟和非火的区域,利用帧差法进行运动检测,利用时间分析法查看火焰像素值在连续序列中变化,进行空间分析,减少近似火焰运动物体的误检,但是在实验中,样本集较小,不具有说服力,检测正确率也不高;Benjamin等[11]对RGB、HSV和YCbCr颜色空间定义颜色规则,用于分割火区,使用灰度共生矩阵(GLGM)计算火焰的5个纹理特征,但是灰度共生矩阵描述图像易受光照影响,实验对非火焰干扰源(明亮的早晚太阳光)检测结果较差,容易产生误检;Yuan等[12]采用直方图分割方法提取火灾候选区域,然后采用光流法计算候选区域的运动矢量以区分火灾和火灾类似物,设法提取图像中的火焰区域,没有对火灾图像和非火图像进行系统训练、分类和测试;Dimitropoulos等[13]首先通过背景减法、颜色分析来定义候选区域,然后采用颜色概率、闪烁、时空能量等多种时空特征对火灾行为进行动态纹理分析,最后借助支持向量机(Support Vector Machine,SVM)进行检测,实验取得了不错的效果,但分析火焰近似物时没有考虑森林中易与火焰混淆的红叶。
以上火焰检测研究中,火焰特征的提取多采用人工设定并提取,过程较繁琐,使用颜色直方图、图像通道、帧差法、运动特征检测等处理技术。此类方法抗干扰性能差,当图像背景复杂时,误差较大。深度学习是基于人工神经网络的最新概念之一[14],已广泛应用于诸多领域,具有识别准确率高的特点。深度学习方法回避了繁琐的人工特征提取操作,当光照变化、图像背景复杂时仍然能保持良好的检测精度。在人脸识别领域,Vasudha等[15]使用局部方向位置模式(LDPP)和局部三元模式(LTP)作为面部识别方法,然后使用主成分分析(PCA)和一般判别分析(GDA)来降维,最后使用深度置信网络(Deep Belief Network,DBN)学习、训练,识别率达到95.3%;Yuan等[16]利用谷歌研发的第二代人工智能学习系统Tensorflow的卷积神经网络(Convolutional Neural Network,CNN)进行人脸识别,该方法在复杂环境下具有较高的识别精度和较高的鲁棒性,准确率达到87%;Fan等[17]将DBN用于人脸识别,以RL人脸图像库的400张图像为样本进行实验,在小型数据集上获得了良好的性能,识别率达到93.5%。深度学习在火灾烟雾的图像识别上也有不错的效果;Zeng等[18]改进了基于CNN的物体检测方法来检测火焰烟雾,超过了传统方法的检测精度,在开放空间中获得了更好的性能;Kaabi等[19]提出了新的烟雾探测方法,基于DBN检测林火的烟雾,检测正确率可达95%。深度学习方法也非常适合高精度火焰检测,Hüttner等[20]基于谷歌Tensorflow的Inception v3模型,进行火灾图像检测,在实验数据集中可达到99%的准确率。虽然深度学习具有识别率高的优势,但是神经网络层数多,训练和测试比较耗时[14]。在深度学习中,训练时间取决于设备的性能,使用GPU训练数据集时,其速度比使用CPU快约50倍;但是支持GPU加速的设备较昂贵且体积大,不能在嵌入式设备上实现。Vennelakanti等[21]利用Tensorflow实现CNN,对交通标志检测和识别,准确率相当高,可达到99.18%,但需要借助GPU加速,对设备要求高,无法在嵌入式上实现;Chin等[22]利用CNN进行面部皮肤质量检测,训练中最高准确率为97%,同样需要GPU加速;Jhuang等[23]将DBN用于人脸验证,验证准确率为96.43%,但预训练时间复杂度高、计算效率低;回天等[24]提出基于Faster R-CNN 的多类型火焰检测方法,避免复杂的人工特征提取工作,在面对复杂背景、光照强度变化和形态多样的火焰图像时依然保证较好的检测精度,该网络虽然在上百万幅图像上训练过,但对于火焰识别的专一性还有待提高,另外虽然可有效提高检测精度,但检测速度较慢,无法实时检测。
森林火灾预警要求高实时性,且林间设备性能有限,深度学习方法并不适用;需要探索准确率高、速度快、可运行于嵌入式设备的火焰检测方法。局部二值模式算法(Local Binary Pattern,LBP)具有旋转不变性和灰度不变性等显著优点,广泛应用于目标检测等领域;此算法识别率高,不依赖机器运算性能,在嵌入式设备上可以成功运行,取得较好识别效果。张斌等[25]结合改进的四帧差分法和高斯混合背景建模法提取烟雾运动前景,利用烟雾颜色特征、小波变换分析和LBP纹理特征,多特征线性融合并通过最近邻(KNN)分类算法进行识别;袁洁等[26]利用三帧差分法提取烟雾前景,然后通过LBP与灰度共生矩阵分别获取烟雾纹理的局部特征和统计特征,最后将烟雾纹理特征输入Fisher分类器以识别烟雾与非烟雾;严云洋等[27]改进火焰颜色特征公式,根据LBP特征向量、火焰动态纹理、火焰闪烁频率特征进行火焰识别,实验中非火焰干扰源为近似火焰颜色的地面和墙壁、车灯、外套颜色类似火焰的人,实验效果不错。
部分学者采用LBP算法提取图像纹理特征的同时,选用SVM进行分类,取得很好的实验效果。戴静等[28]采用累积差分法检测运动目标,根据Ohta颜色空间找出图像中具有火焰颜色的疑似区域,将疑似区域经过BEMD分解,使用LBP算子对所提取的固有模态函数(IMF)图像进行纹理特征提取,最后将提取的纹理特征结合圆形度、矩形度、重心高度输入到SVM里进行火焰识别,实验中非火焰干扰源为近似火焰颜色的墙壁等,仿真结果较好,但火焰误检率和漏检率受图像库的影响;卢英等[29]在RGB颜色空间对连续帧火灾图像进行预处理,并进行频闪特性分析以提取疑似火焰区域,建立疑似火焰图像高斯差分尺度空间,利用LBP算法和全局二值模式算法(Global Binary Pattern,GBP)提取火焰局部纹理特征和全局纹理特征,最后将多尺度的纹理特征输入到SVM进行识别,取得了不错的效果;张霞等[30]首先用帧差法和RGB颜色高斯模型进行运动颜色检测,得到疑似火焰区域,再提取其红色分量统计特征、小波高频能量和LBP直方图特征,最后将特征向量输入SVM分类器进行火焰识别,实验使用的非火焰干扰源为车灯、穿红衣服的人等,效果也不错;Russo等[31]应用中值滤波算法从输入帧中减去背景,然后,应用基于形状的滤波方法获得感兴趣区域,计算LBP直方图形成特征向量,应用Bhattacharyya系数验证烟雾区域并使用SVM分类;Wang等[32]使用LBP和LBPV提取不同层次的静态纹理特征,使用光流矢量分析确定可疑区域轮廓的运动方向,通过SVM识别烟雾图像,也取得较好的效果,但是LBP算法只提取图像的空域特征,具有局限性,可以考虑同时选取局部相位量化(Local Phase Quantization,LPQ)算法提取图像的频域特征,使提取的图像特征更加丰富完整。
LBP结合LPQ提取图像特征的方法在人脸表情识别领域已有广泛应用。朱长水等[33]首先对人脸图像分别在空域提取LBP特征、在频域提取LPQ特征,然后融合成LBP、LPQ直方图,进行直方图相似性比较,最后根据最近邻原则进行识别,得到了很好的效果;Gan等[34]利用LBP、LPQ方法从检测到的人脸图像中提取纹理特征,并基于图像集对人脸进行识别,实验结果表明,该系统实用性强、对光照具有较强的鲁棒性;Turan等[35]将4种描述符(LBP、LPQ、韦伯局部描述符和金字塔梯度方向直方图)用于提取面部表情特征,并设计了自适应的描述符选择算法,实验结果表明所提出的分类方法比任何单个描述符分类方法都具有更高的识别率;Zhang等[36]和Doiphode等[37]也采取了LBP结合LPQ的算法进行人脸识别,对7种不同表情的综合成功识别率分别可达85.94%和88.11%,证明了这两种算法结合用于纹理识别的有效性。
综上所述,以往对林火图像的研究集中在颜色空间选取、纹理提取、运动检测以及分类器选择等方面,使用的算法存在局限性,且实验设计存在缺陷,没有考虑森林中易与火焰混淆的红叶;深度学习方法具有识别率高的优势,但对机器性能要求较高、训练耗时较长,不适用于实时林火监测。本研究尝试探索准确度优于深度学习、不依赖硬件性能、识别速度快且能够在嵌入式设备上实现的方法,以提高火灾预警的准确性和实时性,为在林中布设该设备提供算法基础。很多研究证明了YCbCr颜色空间规则、LBP算法和LPQ算法提取纹理、SVM分类等单个方法在图像识别方面的有效性,但是很少有学者将它们结合用于林火识别。

1 火焰疑似区域检测
1.1 颜色空间转换
摄像机拍摄的图像通常为RGB格式,RGB颜色模型中色调、亮度和饱和度混合表示,难以分离,图像细节不易数字化调整。基于RGB颜色空间的火焰分割提取,不能将像素值转化为亮度和色度,较为依赖光照,如果光照发生变化,区分火焰像素效果较差;针对此缺陷需要将RGB颜色空间转换到YCbCr颜色空间。在YCbCr颜色空间提取火焰区域时,可以充分利用火焰亮度和色度信息,所以考虑在该颜色空间提取火焰,转换公式如下所示[7]:

(1)
1.2 颜色空间分割火焰元素规则
将图像转化到YCbCr颜色空间后,利用规则对图像进行处理,提取疑似火焰的区域,规则如下[38]。
规则1:
(2)
其中:I(x,y)表示输入的RGB图像,RⅠ(x,y)是应用“规则1”后(x,y)点的像素值。
如果Y(x,y)>Cb(x,y)则该点保留原RGB图对应点的像素值,否则像素值置为0。
规则2:
(3)
其中:Ymean是原RGB图像亮度的平均值,Crmean是原RGB图像红色色度的平均值,RⅡ(x,y)是应用“规则1”和“规则2”后(x,y)点的像素值。
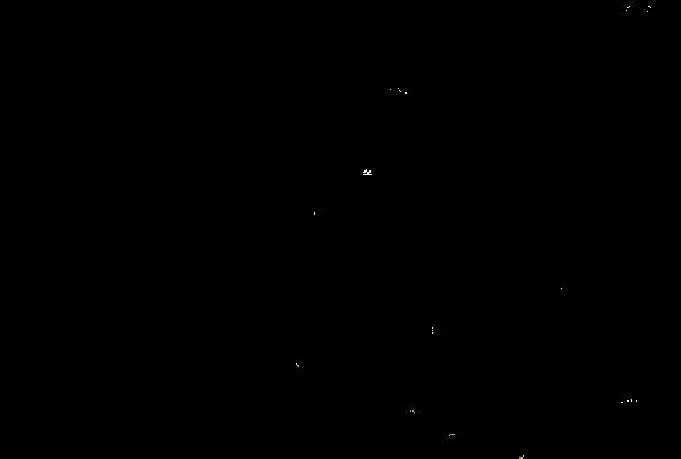
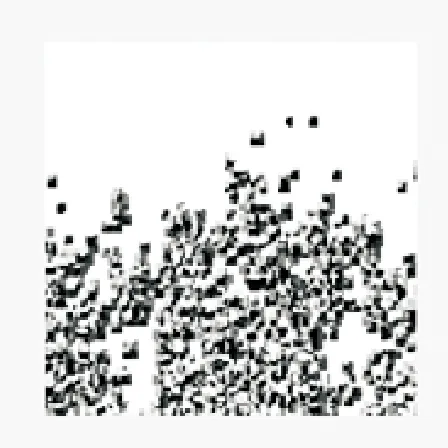
对图像处理和计算是在YCbCr颜色空间进行的,经过处理后输出图像依旧为原来的颜色空间,省去了YCbCr空间向RGB空间的转化,提高了效率。通过两条规则进行检测,图1和图2给出了普通树林和发生火灾树林的近景、远景图像及YCbCr提取结果;图3是红叶林图像及YCbCr提取结果。
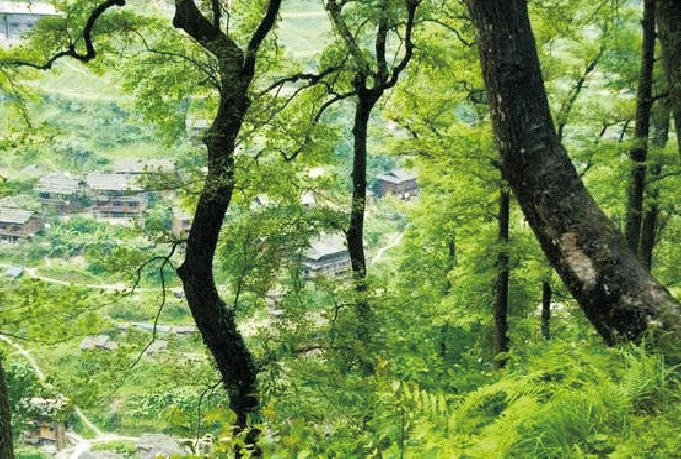
(a)普通树林近景图像
(b)普通树林近景图像的YCbCr提取结果

(c)普通树林远景图像

(d)普通树林远景图像的YCbCr提取结果

(a)发生火灾树林近景图像

(b)火灾树林近景图像的YCbCr提取结果

(c)发生火灾树林远景图像

(d)火灾树林远景图像的YCbCr提取结果

(a)红叶林图像

(b)红叶林图像的YCbCr提取结果
从图2(b)中可发现,颜色空间规则只提取出了火焰区域,而没有提取穿着红色衣服的人,说明算法对部分类似火焰颜色的干扰物有排除功能,鲁棒性较强。经过两条规则过滤,绿叶森林的图像处理后基本为黑色,发生火灾的森林图像经过处理后火焰部分被顺利提取;然而红叶森林与火焰在颜色上相似,仅通过两条规则不能区分红叶林与火焰。
从图2和图3可以看出,火焰与红叶林纹理存在明显差异,火焰的纹理为片状,中间部分是连续的;而红叶林的叶子与叶子间存在缝隙,其纹理是由细密的点组成,中间往往不连续。因此考虑通过纹理特征的差异区分红叶林与火焰;将颜色规则过滤后的图像转化为灰度图,进行纹理提取,转化结果如图4。

(a)普通树林近景

(b)普通树林远景

(c)发生火灾树林近景

(d)发生火灾树林远景

(e)红叶林
Fig.4 Results of converting the extracted image into a grayscale image
2 火焰特征提取
为了区分红叶林与森林火灾图像,选取LBP与LPQ结合的方式提取纹理,LBP、LPQ分别从空域、频域提取纹理,将图像空域和频域的特性结合起来,使得纹理特征提取更加全面。
2.1 LBP算法提取纹理
LBP是描述图像局部纹理特征的算法,提取特征时计算量小,只需在很小的邻域内使用算法和查询表。LBP算法的原理是比较中心像素与邻域像素的灰度值[39],如果邻域某像素灰度值大于等于中心像素灰度值,则置为1,否则置为0。规则如式(4)-(5)所示:
(4)
(5)
其中:gc为中心像素点的灰度值;gi为其邻域像素点的灰度值;P表示周围像素点的个数;R表示邻域半径,邻域半径是中心像素点与邻域像素点的欧式距离。
LBP算法的计算方式如图5所示,图5(a)中给出3×3的像素块,共有9个像素,各自标有该点灰度值;按照规则处理后,变为图5(b)。以顺时针方向组合8个邻域点的值,得出二进制数,转化为十进制,便可以得到此区域的LBP特征,最终以直方图方式得出图像的LBP特征。因为当窗口9个像素灰度值同时出现亮度的非线性变换或者线性变换时,中心像素的灰度值与邻域内像素值大小关系不变,所以LBP提取纹理具有光照不变性,对于不同亮度下的图像,鲁棒性较好。
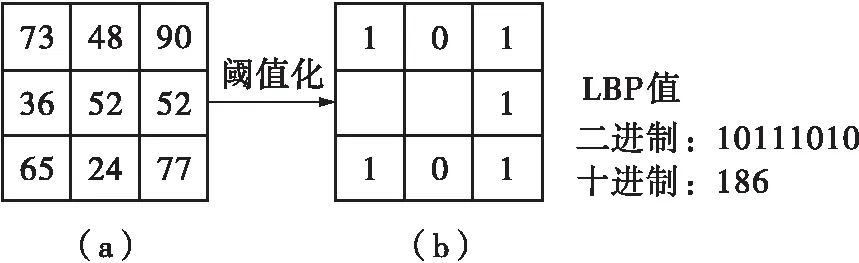
图5 LBP算法
(6)
旋转不变模式可以实现当图像旋转或倾斜时LBP值保持不变。计算公式为
(7)
将上述两种模式结合得到旋转不变统一模式,公式描述如式(8):
(8)

步骤1 将图像划分为N×N的图像子块,计算每一块中每个像素的LBP值;
步骤2 对每个子块进行直方图统计,获得N×N个直方图;
步骤3 利用这N×N个直方图形成特征向量,描述图像的纹理特征。
2.2 LPQ算法提取纹理
LPQ算法利用图像的频域相位信息提取纹理特征。LPQ算法可以提取在中心对称模糊下具有模糊不变性的纹理特征,该特征通过短程傅里叶变换(STFT)计算得到图像上像素点的局部相位信息,对于图像f(x,y),采用离散的短时傅里叶变换[33],其计算方式如下所示:
(9)
傅里叶系数相位可以通过每部分的实数和虚数的符号来表示,如式(10)所示:
(10)
其中:gj是向量G(x)=[Re{F(x)} Im{F(x)}]的第j个部分。
然后对qj进行二进制编码,如下所示:

(11)
其中:LPQ(x)表示窗口大小为M×M的算法,图6是窗口为5×5的LPQ算法。后续实验中会检测大小为3×3、5×5、7×7、9×9的窗口的各自表现,选取最合适窗口尺寸。
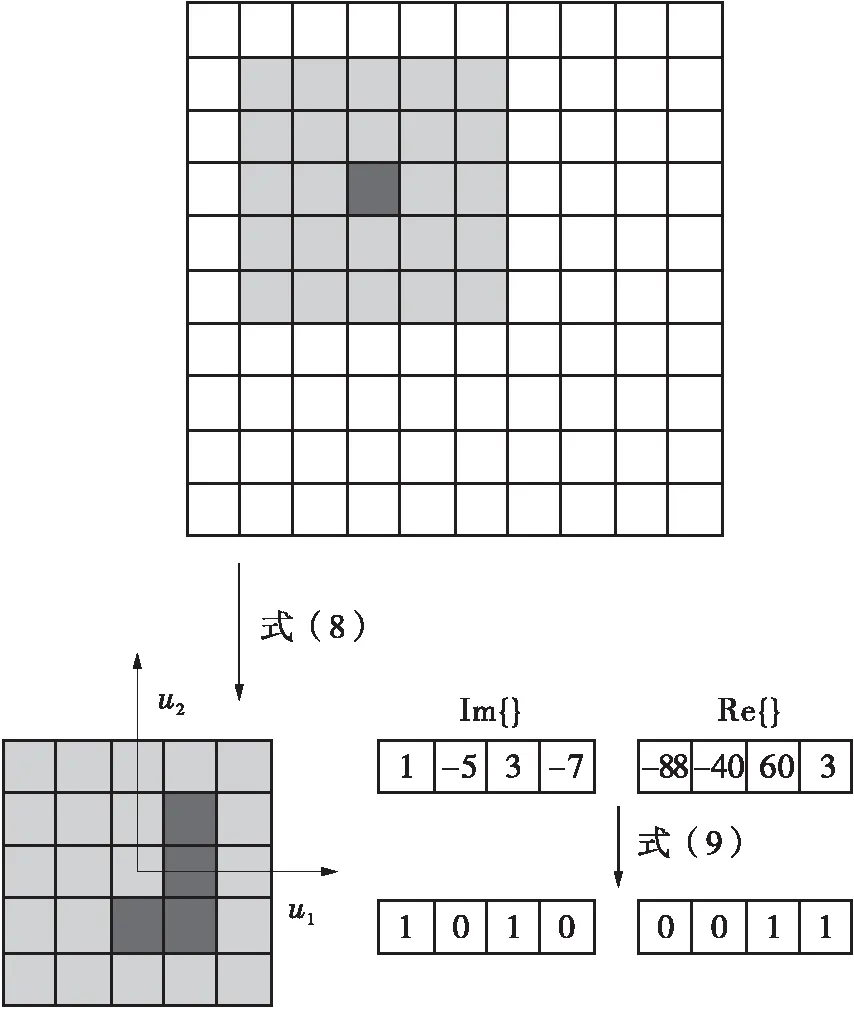
图6 LPQ算法
2.3 LBP与LPQ融合的算法
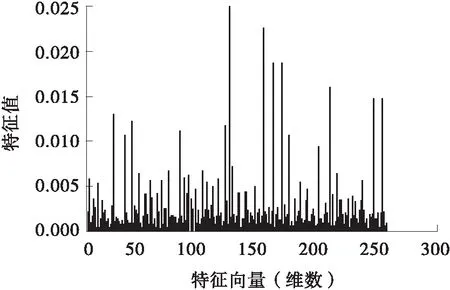
对图像的空域处理是处理图像的像素本身,反映灰度变化;对图像的频域处理是处理图像变换域的系数,反映了梯度变化。无论是空域还是频域处理,进行纹理分析时总会丢失部分信息,将两者结合,能够互相补充,使得丢失的信息尽可能少[33]。LBP提取的火焰纹理与红叶林纹理、火焰与红叶林的LBP直方图如图7、图8所示;LPQ提取的火焰纹理与红叶林纹理、火焰与红叶林的LPQ直方图如图9、图10所示。

(a)近景火焰纹理

(b)远景火焰纹理
(c)红叶林纹理
Fig.7 Flame texture and red leaf forest texture extracted by LBP
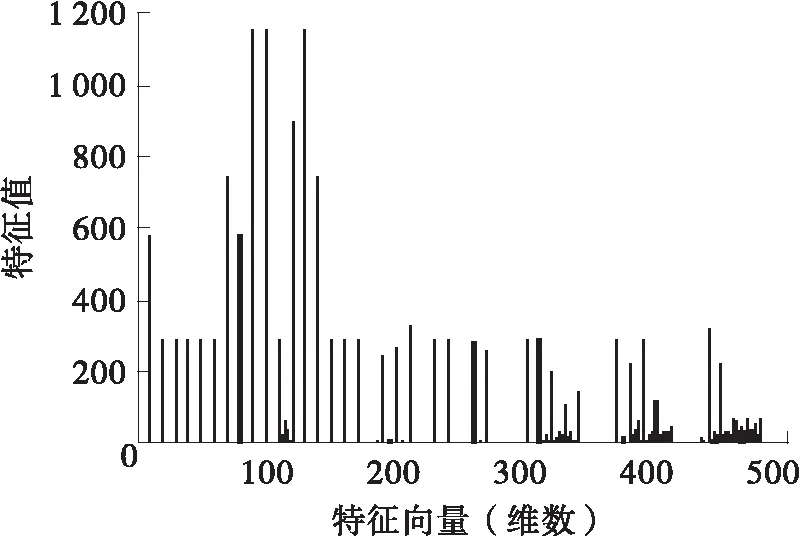
(a)近景火焰LBP直方图

(b)远景火焰LBP直方图

(c)红叶林LBP直方图

(a)近景火焰纹理

(b)远景火焰纹理

(c)红叶林纹理
Fig.9 Flame texture and red leaf forest texture extracted by LPQ
由图7到图10可看出,火焰图像与红叶林图像的LBP、LPQ纹理存在明显差异,因此可将图像的LBP直方图和LPQ直方图组合起来,作为特征向量输入SVM分类器进行训练和测试。
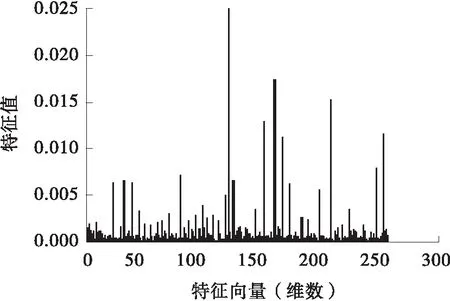
(a)近景火焰LPQ直方图

(b)远景火焰LPQ直方图
(c)红叶林LPQ直方图
3 SVM分类

SVM非线性分类的思想是把输入样本经过非线性变换映射到高维核空间,在高维核空间中寻找最优分类超平面,将样本集分为两类,并使两类间的间隔最大[30]。设有一个最优超平面[41]能将两个类别分开,同时有少许不能准确分类的样本点。引入松弛变量ξi度量样本点与最优超平面的距离程度。
yi(〈w·xi〉+b)+ξi-1≥0
(12)
其中,i=1,2,…,n。
构造最优超平面时所有样本满足式(13):
(13)
其中:C为非负惩罚参数;w、b分别为超平面的法向量和截距。非负惩罚参数C越大,未落在正确类别的样本对最优超平面的惩罚越大。
SVM中提供了由低维空间到高维空间非线性映射的核函数机制,有3种非线性核函数:多项式核函数(Polynomial Kernel)、径向基核函数(RBF Kernel)和Sigmoid核函数(Sigmoid Kernel)。本研究选择RBF核函数作为分类函数。通过实验观察核参数和惩罚因子取不同值时的识别率,如表1和表2所示。由表1和表2可见,当核参数不变时,惩罚因子C=300识别率最高;当惩罚因子不变时,核参数取值 1.6 识别效率最高。

表1 不同核参数的识别情况
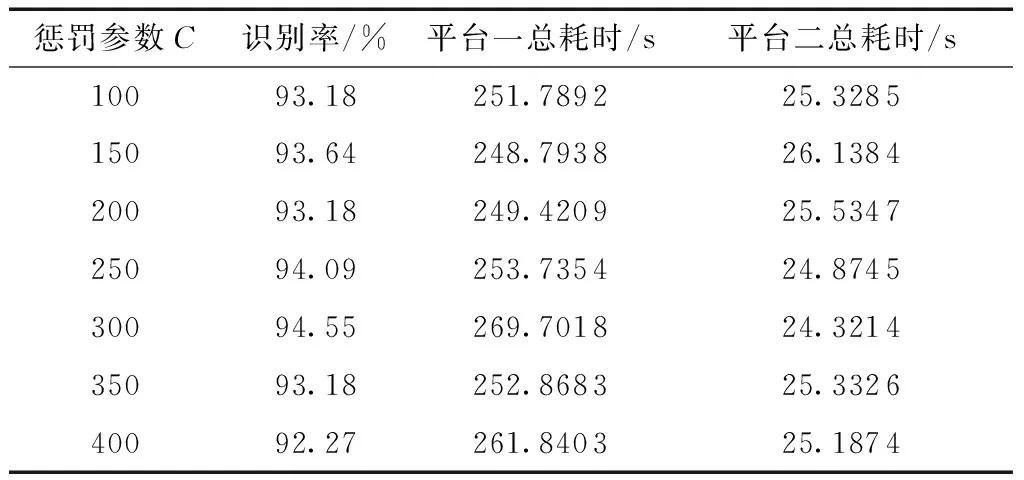
表2 不同惩罚参数的识别情况
4 实验数据与结果分析
文中实验平台一是Windows7操作系统、AMD A10- 7300 Radeon R6处理器、4 GB内存;实验平台二是Ubuntu18.04LTS操作系统、Intel(R)Xeon(R)Bronze 3106 CPU @ 1.70 GHZ处理器、64 GB内存、GTX1080Ti显卡,支持GPU加速。算法在MATLAB 2014b和Python3.6上运行。实验数据包括未发生火灾的森林(混合有绿叶林与红叶林)和发生火灾森林的训练,测试图像共2 200张,其中测试集占10%。森林图像涵盖寒带、温带、热带的多种常见森林树木,包括白桦林、落叶松、云杉、柏树 、松林、杨树林、马尾松、枫叶林、水杉树林、混交林等。由于森林火灾预警需要考虑大范围、远距离的应用场景,数据集包括500张远景拍摄、且起火面积较小的图像。实验代码包括3部分——YCbCr颜色空间提取疑似火焰区域、LBP和LPQ提取纹理以及SVM分类。其中LBP算法采用奥卢大学网站上的开源代码(http:∥www.cse.oulu.fi/CMV/Downloads/L BPMatlab),LPQ算法采用CodeForge网站上的开源代码(http:∥www.codeforge.cn/read/252387/lpq.m_html),SVM分类采用Matlab中的工具包LibSVM。算法的流程图如图11所示。

图11 算法流程图
使用YCbCr的规则处理图像并转化为灰度图后,首先用LBP算法对原灰度图(未统一图像尺寸)进行测试。不同LBP算法对原灰度图识别情况如表3 所示。
分析表3所示数据,发现3种LBP算法的识别效率都不高,且耗时很长。主要是因为所用图像普遍比较大,提取特征时耗费了很多时间,而且由于图像尺寸不一,提取到的特征向量泛化能力较弱。针对以上问题,采用双线性差值办法,将图像统一到128×128像素大小,继续测试。不同LBP算法对统一大小灰度图识别情况如表4所示。
表3 不同LBP算法对原灰度图识别情况
Table 3 Recognition result of original grayscale images by different LBP algorithms
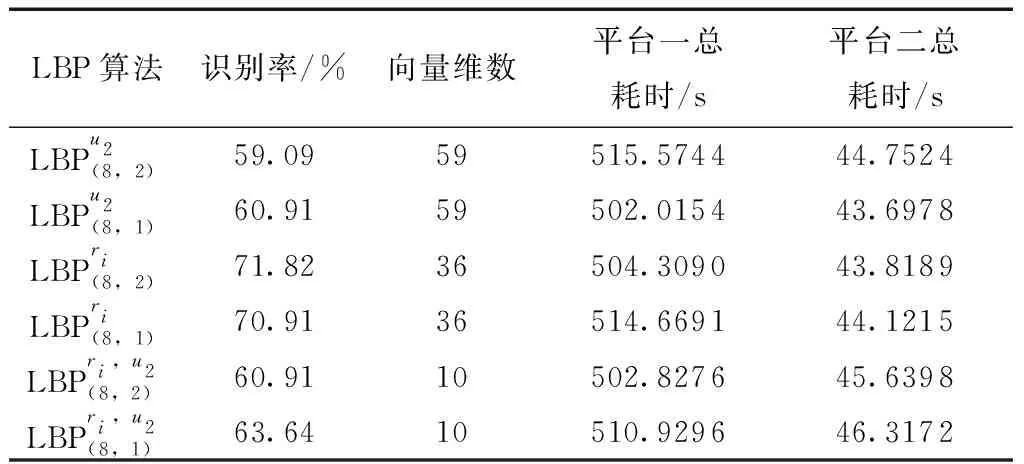
LBP算法识别率/%向量维数平台一总耗时/s平台二总耗时/sLBPu2(8,2)59.0959515.574444.7524LBPu2(8,1)60.9159502.015443.6978LBPri(8,2)71.8236504.309043.8189LBPri(8,1)70.9136514.669144.1215LBPri,u2(8,2)60.9110502.827645.6398LBPri,u2(8,1)63.6410510.929646.3172
表4 不同LBP算法对统一大小灰度图识别情况
Table 4 Recognition result of uniform size grayscale images by different LBP algorithms

LBP算法识别率/%向量维数平台一总耗时/s平台二总耗时/sLBPu2(8,2)73.1859162.18779.5941LBPu2(8,1)69.5559167.94689.1184LBPri(8,2)81.8236158.99129.3476LBPri(8,1)78.1836161.88029.6475LBPri,u2(8,2)80.010157.38679.2718LBPri,u2(8,1)76.3610160.13519.3587
分析表4可以发现,图像经过双线性差值方法统一尺寸后,特征提取时间以及总耗时显著下降,识别率明显上升;但是识别率依旧没有达到理想效果,对此采用分块统计图像LBP特征,最终汇总特征向量的方法来解决。这样可以更加注重图像每块区域的细节,提高识别率。当只采用LPQ算法时,在不同的窗口大小情况下进行测试。不同窗口大小的LPQ算法识别情况如表5所示。
表5 不同窗口大小的LPQ算法识别情况
Table 5 Recognition result of LPQ algorithm with different window sizes

窗口大小识别率/%平台一总耗时/s 平台二总耗时/s3×375.91208.355016.91955×576.36218.938316.21137×777.73220.158816.21419×976.36 240.691917.7883
从表5可以看出,在窗口大小不同时,提取特征所需时间相差不多;采用大小为7×7的窗口时,识别率最高,可达到77.73%。
由于单独使用LBP、LPQ时识别率较低,因此将两种特征向量结合,测试结果如表6所示。
表6 LBP、LPQ算法结合的识别情况
Table 6 Recognition result after combining LBP and LPQ algorithms
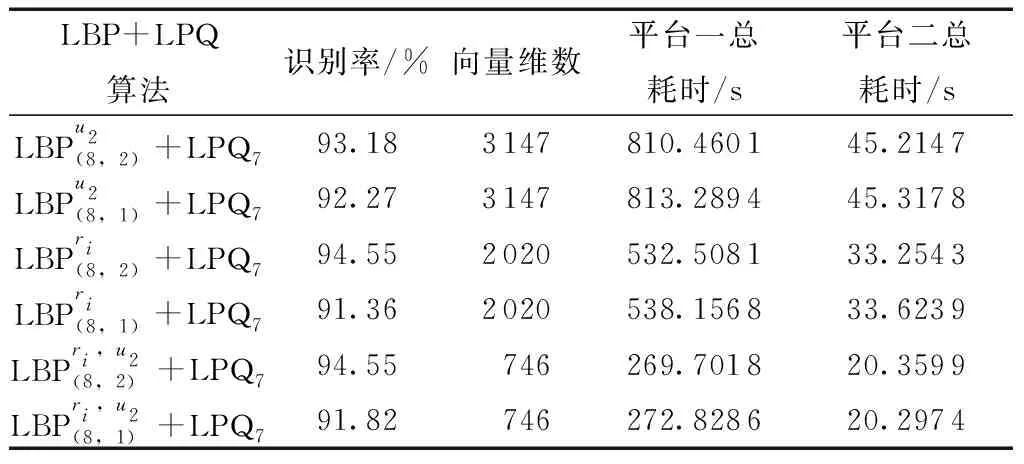
LBP+LPQ算法识别率/%向量维数平台一总耗时/s平台二总耗时/sLBPu2(8,2)+LPQ793.183147 810.460145.2147LBPu2(8,1)+LPQ792.273147 813.289445.3178LBPri(8,2)+LPQ794.552020 532.508133.2543LBPri(8,1)+LPQ791.362020 538.156833.6239LBPri,u2(8,2)+LPQ794.55746 269.701820.3599LBPri,u2(8,1)+LPQ791.82746 272.828620.2974
表7 本算法与深度学习算法的对比
Table 7 Comparison of the proposed algorithm and deep learning algorithms
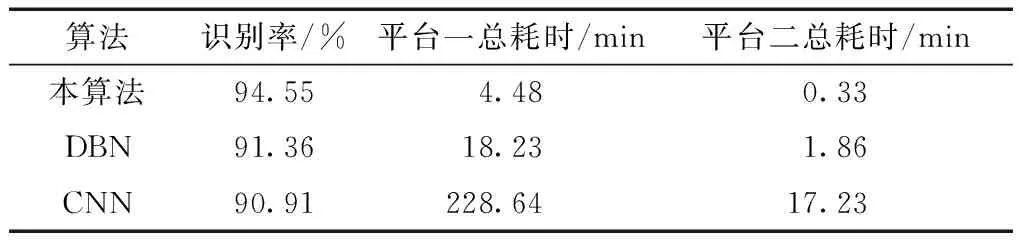
算法识别率/%平台一总耗时/min平台二总耗时/min本算法94.554.480.33DBN91.3618.231.86CNN90.91228.6417.23
由表7可见,本算法的正确率高于这两种深度学习方法,在保证准确性的同时,提高了火灾预警的实时性,预测耗时是DBN的1/4、是CNN的1/50。
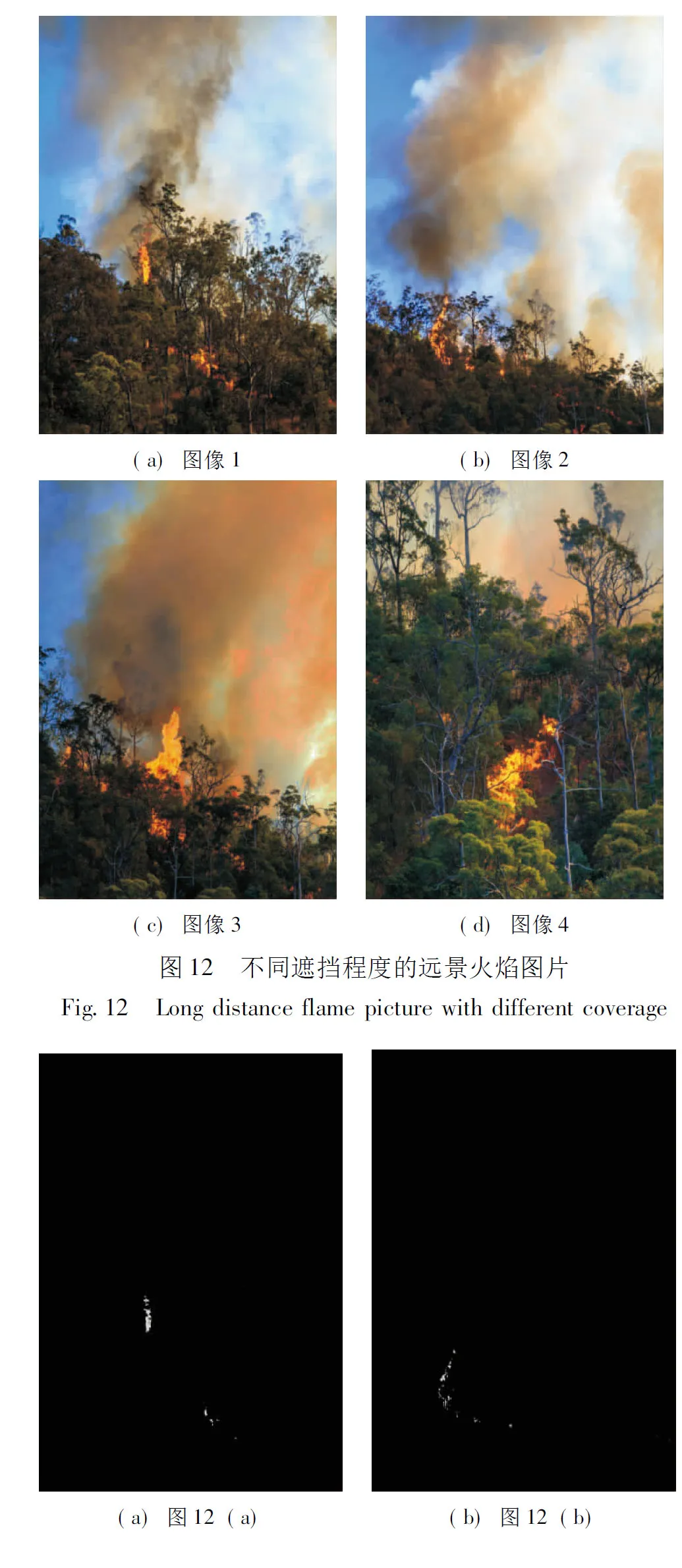
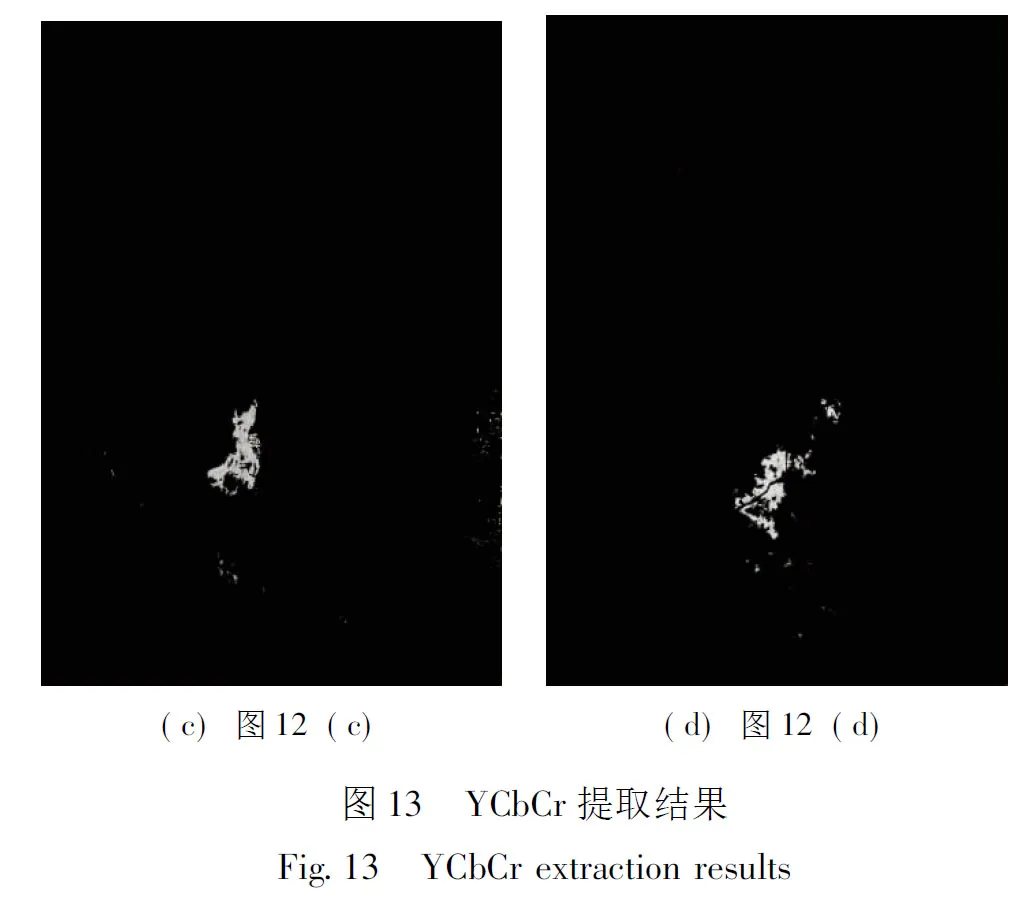
森林火灾预警需要考虑大范围、远距离的应用场景,远处起火时,火灾初期的火焰面积较小,且容易被树木遮挡,因此对远距离起火、不同遮挡程度的图片进行测试。图12(a)和12(b)是被远处树木严重遮挡的情况,图12(c)和12(d)是有遮挡但不严重的情况;图13是火焰区域提取结果。
实验结果显示,有严重遮挡的图像(图12(a)和12(b))未能成功预警,图12(c)和12(d)预警正确。因为图12(a)和12(b)火焰本身较小且距离远,被树木枝干遮挡严重,对纹理造成较大干扰,导致提取出的特征向量和正常火焰差距较大,在SVM分类时,误判为未起火图像。
对以上问题采用改进措施:在林间不同高度、不同方位布设摄像机,对同片较大区域,获取多种方位的拍摄视角,这样能够获得未遭到严重遮挡的图像,保证纹理提取更加完整,从而提高森林火灾预警成功率。对于照相机无法覆盖的视野盲区及林木茂密、初期火焰易被遮挡的区域,增设ZigBee森林防火预警系统。例如文献[42]选用传感模块和ZigBee模块组成终端节点,芯片为CC2530,温湿度传感器选用SHT10,并用MQ- 2烟雾传感器实时监测森林的温度、相对湿度、可燃气体浓度等环境参数,通过GPRS模块将数据发送到远程服务器,当数据超过设定的阈值,可及时报警;文献[43]使用基于ZigBee和GPRS的火灾探测系统,利用MQ- 2烟雾传感器采集信号,成本低、反应快速,能满足森林环境监测需要;文献[44]使用ZigBee Pro技术,利用CC2531和温湿度传感器SHT11搭建森林火灾监测系统,该系统工作稳定,为森林火灾预防提供帮助。无线传感器网络有自动组网、成本低的特点[45],但监控节点很难获得持续供电,节点不能长久工作[44],单节点监控范围有限。在大范围森林中需要大量节点,可靠性差,难以维护,在图像处理无法监测到的小片区域使用,和图像监控系统形成了有效补充。
5 结语
研究结果证明,本算法可以成功区分红叶林与火焰,识别率高达94.55%,可降低红叶林在森林火灾图像识别中的干扰,具有一定的现实意义。算法的检测率高、适应性强、速度快,是高效的火焰检测算法;本算法识别率高于两种深度学习算法,大幅度的减少了训练和测试时间,预测耗时是DBN的1/4、是CNN的1/50,提高了火灾预警的实时性,为林火检测算法在嵌入式设备上实现提供了依据。将来拟进一步完善图像集,扩大测试样本,使其尽可能包含更多不同形态、大小、颜色、燃烧程度的火焰,和多样的绿叶林、红叶林,并加入更多火焰状干扰源图像进行测试,对远距离被树木遮挡的火灾初期图像进行更深入的训练、测试,提高检测率和算法的鲁棒性;另外进一步降低算法训练和测试时间,为快速高效的林火预报提供算法实现。
