考虑人体坐姿模型的乘坐舒适性自适应控制研究*
2019-11-26胡启国陆伟
胡启国 陆伟
(重庆交通大学,重庆 400074)
1 前言
传统的被动减振隔振技术已经成熟并广泛应用,但在激励振幅较大或低频振动情况下无法达到满意的效果,而主动减振恰好弥补了这一不足[1]。滤波-X最小均方(Filtered-x Least Mean Square,FxLMS)算法因其结构简单和计算复杂度低而被广泛应用于振动主动控制领域,配合压电智能材料的使用,能够对振动进行实时控制。传统的FxLMS算法收敛速度较慢,为此,许多学者针对其结构和特性提出了相应的改进方法[2-6]。这些改进算法虽然在一定程度上提高了收敛速度,减小了稳态误差,但是在处理频率变化范围较大,即带宽较宽的信号时,其性能会受到一定的限制。针对上述问题,Qiu Z[7]等采用离散小波变换对参考输入信号进行分解,得到低频和高频信号,并对不同频率成分的信号采用独立的滤波器进行调整,提高了系统的稳定性和收敛速度。但是小波变换仅对低频成分进行细分,当面对微弱、非平稳高频振动信号时,小波变换的分解重构能力受限。为了解决上述问题,Lei Luo[8]等采用小波包变换FxLMS(Wavelet Packet FxLMS,WPFxLMS)算法,通过小波包变换将信号的低频成分和高频成分同时进行分解,使算法在面对带宽较宽的信号时表现出较好的优越性,但其仅对参考输入信号进行小波包分解,如果未知的主通道或期望信号不断变化,该算法不能保持较好的性能。
基于上述分析,本文提出了一种基于小波包变换的多 通 道FxLMS 算 法(Wavelet Packet-Multichannel FxLMS,WP-MFxLMS),利用次级通道模型对控制信号进行估计,从而有效地减小了不断变化的主通道或期望信号带来的影响。同时,为了验证所提出算法的有效性,将其应用在汽车座椅振动主动控制中,建立了1/2路面-车辆-座椅8 自由度动力学模型,在MATLAB/Simulink中对振动主动控制算法进行了仿真,对比分析了传统FxLMS、WPFxLMS 和WP-MFxLMS 算法的整体性能和减振效果。
2 路面-车辆-座椅动力学模型建立
2.1 路面时域模型建立
为了研究人体对振动的反应,首先要对路面激励进行建模。采用滤波白噪声法建立单轮路面的时域模型,并根据前、后轮的时滞关系建立了前、后轮路面激励时域模型[9]。当汽车以速度u匀速行驶时,前轮路面激励时域模型的表达式为:

式中,qf为前轮处路面的垂直位移;Gq(n0)为路面不平度系数;w为数学期望为0 的高斯白噪声;n00=0.011 m-1为下截止频率;n0=0.1 m-1为参考空间频率。
根据前、后轮间存在的时滞关系,后轮路面激励时域模型的表达式为:

式中,qr为后轮处路面的垂直位移;τ=l/u为后轮激励滞后于前轮的时间;l为汽车轴距。
由式(1)和式(2),通过MATLAB/Simulink在初速度为20 m/s,路面不平度系数为256×10-6m3(C级路面),轴距为2.5 m的条件下进行仿真,仿真时间为20 s,得到了图1所示的前、后轮路面激励。

图1 前轮路面激励
2.2 8自由度汽车振动模型建立
在建模过程中,为了方便模型推导和简化计算,不考虑车身侧倾和横摆运动,只考虑车身俯仰和垂直运动、前后轴的垂直跳动以及座椅的垂直跳动,并认为车辆的左、右侧车轮轨迹输入具有较高的相关性,简化后的模型如图2所示。

图2 8自由度汽车振动模型
在ISO 5982:2001(E)[10]推荐的人体坐姿低频振动模型中,X0~X3为进行振动测试时选取的人体4 个部位的位移,K1~K3、C1~C3分别为对应部位的人体刚度和阻尼。分析座椅-头部传递特性时,可以将m2看作头部质量,K2为头部刚度,C2为头部阻尼。m0、m1、m3并不与人体生理结构相对应,该模型假设人体为坐姿时,有73%的人体质量在座椅上。本文考虑总质量为75 kg的人体模型,当人体质量不同时,只需改变m3的质量即可得到新的人体模型,如人体质量为55 kg时,对应的m3=30 kg,人体质量为90 kg 时,对应的m3=56 kg,因此,该模型适应能力强。
在路面-车辆模型中,mwf、mwr分别为前、后轮非簧载质量,Ktf、Ktr分别为前、后轮轮胎刚度,Z1、Z4分别为前、后轮位移,Ksf、Ksr分别为前、后悬架刚度,Csf、Csr分别为前、后轴阻尼系数,c、d分别为车身质心到前、后轴的距离,f为车身质心到座椅的距离,Z2、Z3分别为前、后轴对应的车身位移,mb为簧载质量,Ib为车身转动惯量,Zb为车身质心位移,θb为车身俯仰角,Ks为座椅等效刚度,Cs为座椅等效阻尼系数,Ua为主动控制器控制力。
以系统静平衡位置为坐标原点,选取系统的广义坐标为Z=[X0X1X2X3ZbθbZ1Z4]T。
人体低频坐姿振动模型的微分方程为:

车身垂直和俯仰运动的微分方程为:

前、后车轮的垂直运动微分方程为:

将上述微分方程写成矩阵形式,可得:

式中,M为8×8 的质量矩阵;C为8×8 的阻尼矩阵;K为8×8 的刚度矩阵;Kt为8×2 的矩阵;F为8×1 的矩阵;Q=[qfqr]T;U=[Ua]。
3 算法结构
3.1 小波包分解与重构
小波包变换能同时对低频部分和高频部分进行分解,所以它可以对信号进行更准确的分析。其通过一组高低通正交滤波器对信号进行小波包分解,每次分解都能得到更为精细的高频和低频信号,小波包变换分解和重构的表达式为[11]:

式中,hk-2n和gk-2n为小波分解滤波器组;为小波重构滤波器组;l为小波包分解层数;δl,i(n)为小波包重构后第l层上第i个小波包系数,i=0,1,…,2l-1。
3.2 基于小波包变换的多通道FxLMS算法
本文将小波包变换与自适应算法相结合,利用小波包变换对输入信号的低频和高频部分进行分解重构,并对不同频率成分的信号采用独立的滤波器进行调整,同时利用次级通道模型对控制信号进行估计,从而有效地减小了不断变化的主通道或期望信号带来的影响,提高了系统的稳定性和收敛性,算法的结构框图如图3所示。
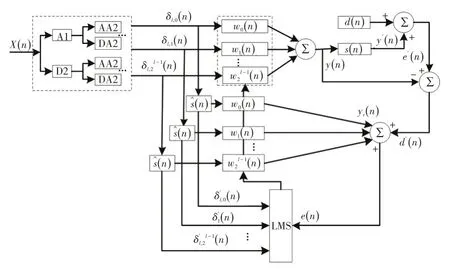
图3 基于小波包变换的多通道FxLMS算法结构
参考信号X(n)经小波包分解重构后得到高低频振动信号δl,i(n),δl,i(n)通过模拟次级通道后得到滤波参考信号与误差信号e(n)的乘积作为梯度参与到权值更新的迭代过程中。
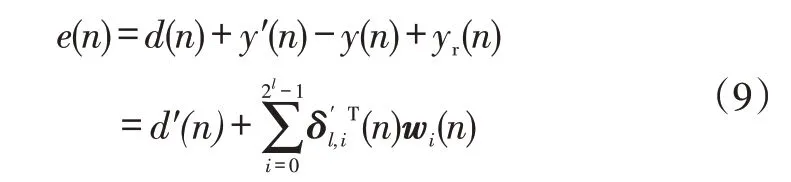
误差信号e(n)为模拟滤波器输出信号yr(n)与经过多通道后得到的期望信号d′(n)之和,即
N阶滤波器的输出信号y(n)为:

式中,δl,i(n)=[δl,i(n)δl,i(n-1)…δl,i(n-N+1)]T。
输出信号经过次级通道后得到的反振动信号为:

式中,S=[S0S1…SM-1]T为次级通道系数;y(n)=[y(n)y(n-1)…y(n-M+1)]T。
次级通道可以通过M阶滤波器进行参数辨识,即,则滤波参考信号为:

采用归一化步长对滤波器权值向量wi(n)进行更新:

式中,μ0、μ1…μ2l-1为对应滤波器的步长因子;γ为很小的正数。
3.3 计算复杂度分析
计算复杂度是评价主动控制算法有效性和实用性的重要指标,低的计算复杂度可以节省计算时间和资源,从而实现计算机对系统的实时控制。WP-FxLMS主要包括了滤波参考信号、滤波器输出信号y(n)、拟滤波器信号输出yr(n)、滤波器权值向量wi(n)以及进行小波包变换所需要的运算。表1给出了3种算法的计算复杂度结果。
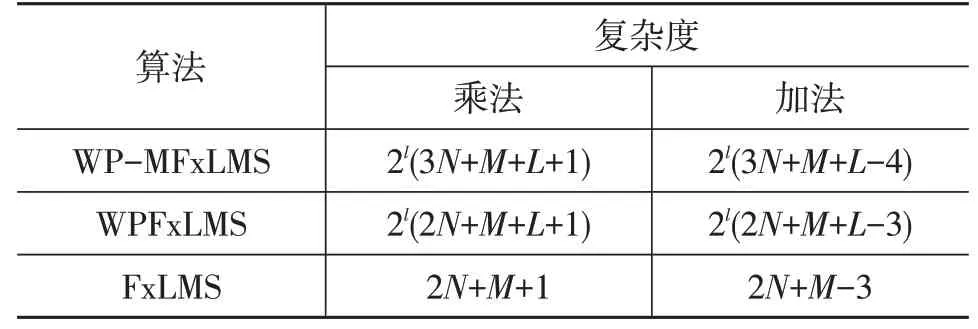
表1 算法复杂度对比
由表1可知,由于采用次级通道对控制信号进行了估计,相比WPFxLMS,WP-MFxLMS 增加了对估计信号的计算。
4 仿真分析
4.1 次级通道辨识
次级通道在实际物理结构上一般包括D/A转换器、功率放大器、作动器等环节,也就是控制信号到作动器产生响应输出位移的传递函数。本文采用附加随机噪声法对次级通道进行离线辨识,图4 所示为采用Simulink 搭建的辨识模型,在仿真中,作动器响应输出位移为与期望信号d(n)相抵消的反振动信号,通过多次仿真,设滤波器阶数为16阶、步长因子为0.001,滤波器各权值的辨识结果如图5所示。

图4 次级通道辨识模型

图5 权值迭代过程
从图5 可以看出,虽然辨识结果收敛较慢,但各权值最终趋于稳定,且离线辨识不需要像在线辨识一样对权值进行实时更新,只需对权值精确辨识即可,因此该辨识结果可以接受。
4.2 时域响应对比分析
为了验证算法的有效性,在MATLAB/Simulink中对被动模型、传统FxLMS 以及WPFxLMS 和WP-MFxLMS算法进行了仿真,仿真模型参数如表2 所示。结合图2和图3,参考输入信号X(n)为人体坐姿输出加速度X¨0,期望信号d(n)为车身振动加速度Z¨0,对于WPFxLMS 和WP-MFxLMS算法,通过对不同的分解层数和小波包基进行仿真后,决定采用dmey小波基进行3层分解重构。滤波器阶数分别取50、100、200,步长因子μ分别取0.001和0.000 1,取人体头部加速度作为评价指标,得到的时域响应对比结果如图6~图8 所示,对图示数据进行整理,得到表3所示的乘坐舒适性能指标参数对比结果。
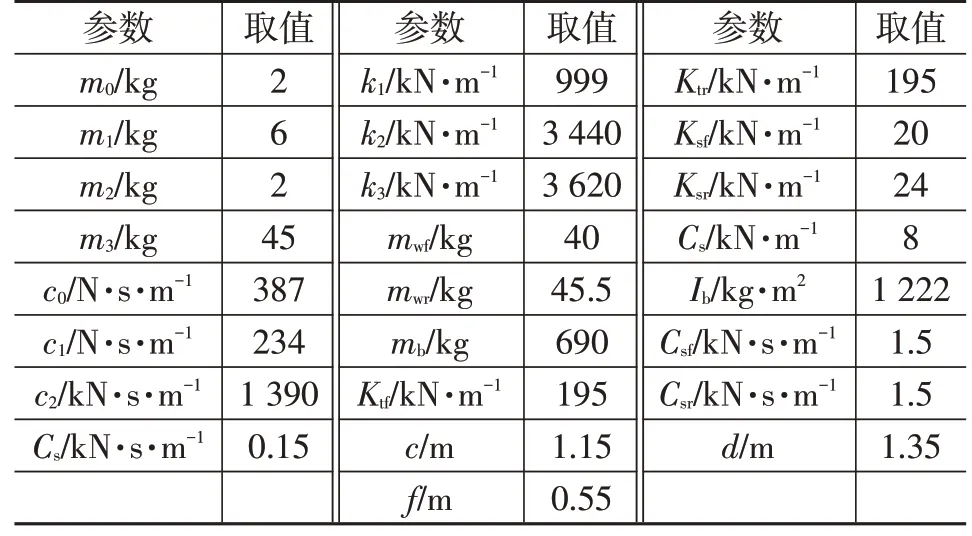
表2 模型仿真参数
由图6~图8及表3可以看出,在滤波器阶数相同的条件下,当μ=0.001时,FxLMS和WPFxLMS算法均发散,直到μ=0.000 1时这两种算法才开始收敛。而本文提出的WP-MFxLMS 算法在3种步长下均收敛,这表明算法具有较好的收敛性和稳定性,并且随着步长因子的减小,算法的控制效果逐渐提升,这表明减小步长因子会减小算法的稳态误差。
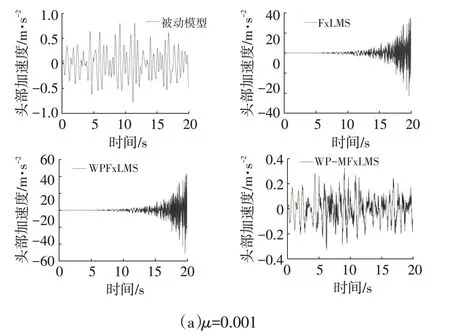

图6 头部加速度时域对比(N=50)

图7 头部加速度时域对比(N=100)
当μ=0.001 时,随着滤波器阶数的增加,FxLMS 和WPFxLMS 算法有收敛的趋势;当μ=0.000 1 时,随着滤波器阶数的增加,算法的控制效果逐渐提升,这表明增加滤波器阶数可以改善算法的控制效果。
在收敛的条件下,与传统被动控制相比,采用振动主动控制算法后,头部加速度均有明显改善,大幅提高了乘客的乘坐舒适性。从控制效果看,在相同步长和滤波器阶数的条件下,WP-MFxLMS算法的控制效果均优于FxLMS 和WPFxLMS,且该算法可以以较低的滤波器阶数达到与FxLMS 和WPFxLMS 相同甚至更好的控制效果,这也在一定程度上降低了计算复杂度。

图8 头部加速度时域对比(N=200)

表3 乘坐舒适性能指标参数值比较
4.3 频域响应对比分析
虽然从时域分析图可以看出算法的控制效果,为了进一步验证WP-MFxLMS 算法的有效性,对图6b、图7b、图8b的加速度时域信号进行频域分析,得到对应的加速度功率谱密度如图9所示。
由图9可知,路面不平度随机激励引起的人体共振频率主要集中在0~20 Hz的低频段,约在2 Hz左右出现1阶共振频率,约在6 Hz 左右出现2阶共振频率。在保证收敛的条件下,采用振动主动控制可以降低头部加速度共振峰值,以图9a 为例,使用WP-MFxLMS 算法后在一阶共振频率处约衰减了6 dB,在二阶共振频率处约衰减了5 dB,在3种算法中控制效果最好。

图9 头部加速度功率谱密度(μ=0.000 1)
5 结论
a.采用ISO 5982:2001(E)推荐的人体坐姿模型建立的路面-车辆-座椅动力学系统能够准确反映人体的振动特征,适用于车辆乘坐舒适性的仿真与分析。
b.与FxLMS 和WPFxLMS 相比,改进的WP-MFx-LMS 虽然增加了计算复杂度,但仿真结果表明,该算法可以以较低的滤波阶数达到理想的控制效果,这也在一定程度上降低了计算复杂度。
c.改进后的WP-MFxLMS 具有较好的收敛性和稳定性,且滤波器阶数会影响算法的控制效果和计算复杂度,因此在选取滤波器阶数时要综合考虑这两种因素。
d.在算法收敛的条件下,采用振动主动控制可以降低人体头部的加速度共振峰值,提高乘坐舒适性;人体产生共振的频率主要集中在20 Hz以下的低频,在进行汽车设计时可以调节悬架阻尼以避开人体敏感区。
