基于GPS-RTK和加速度计的桥梁动态变形监测试验
2019-07-08熊春宝路华丽朱劲松余加勇
熊春宝, 路华丽, 朱劲松, 余加勇
(1.天津大学 建筑工程学院,天津 300350;2.湖南大学 土木工程学院,长沙 410082)
运营中的桥梁结构由于材料老化、环境侵蚀和超重车辆不断增加等因素,不可避免的出现各种损伤,如不予维护,极端情况可能发生突发性的灾害性事故[1-2]。桥梁结构振动位移是对其进行状态评估及安全预警的重要指标,为保障桥梁结构的安全性,预警突发事件,对在役桥梁实施动态变形监测是一项非常重要的内容[3]。传统的桥梁结构监测方法主要用到加速度计、应变仪、倾斜传感器等设备[4],所需测试设备多,现场测试工作量大,并且设备受环境影响损耗较大。随着GPS技术近些年的不断发展,相比于传统的监测方法表现出独特的优势,使用灵活、方便,不受环境影响,任何时段都能接收到卫星信号,可实现长期连续监测,加上其采样频率越来越高的特点使其在变形监测方面得以不断推广[5-9]。然而由于GPS技术受到卫星星历误差、对流层延迟误差、多路径效应误差等因素的影响,其水平测量精度在10 mm,竖向测量精度在20 mm范围内[10]。为提高GPS动态监测技术的测量精度,本文以天津富民桥为监测对象,采用RTK和加速度计联合监测,提出AFEC混合滤波,对RTK接收机采集到的数据进行处理,提取出桥梁结构的振动位移,并与加速度数据序列二次积分得到的位移序列进行对比,验证AFEC混合滤波的有效性。
1 AFEC混合滤波器设计
RTK技术在桥梁结构动态监测中基线通常较短,一般小于10 km,对流层和电离层延迟产生的误差可以得到一定的削弱,但多路径误差、随机噪声等误差不能被削弱[13]。因此RTK监测信号中主要包括结构实际振动信息、多路径误差和随机噪声三部分。其中多路径误差主要分布在0~0.2 Hz频带[14],切比雪夫滤波是在通带或阻带上频率响应幅度等波纹波动的滤波器,本文中用于削弱RTK测试数据的多路径误差。
随机噪声分布在较宽频带,但能量较低。EEMD滤波方法具有良好的局部适应性和自适应性,同时可以改善传统经验模态分解的模态混叠问题[15],适合于对非平稳信号的去噪。另外,根据随机信号的统计特性,从信号自相关函数的角度可以对随机噪声和一般信号加以区分[16],一般信号与随机噪声的归一化自相关函数特征如图1所示。可以看出随机噪声的自相关函数的特征在于最大值为零,其他点迅速衰减到很小,而一般信号没有这样的规则,因为一般信号在不同时刻之间具有一定的相关性。所以本文采用基于自相关函数的EEMD滤波方法去除RTK测试信号中随机噪声的影响。
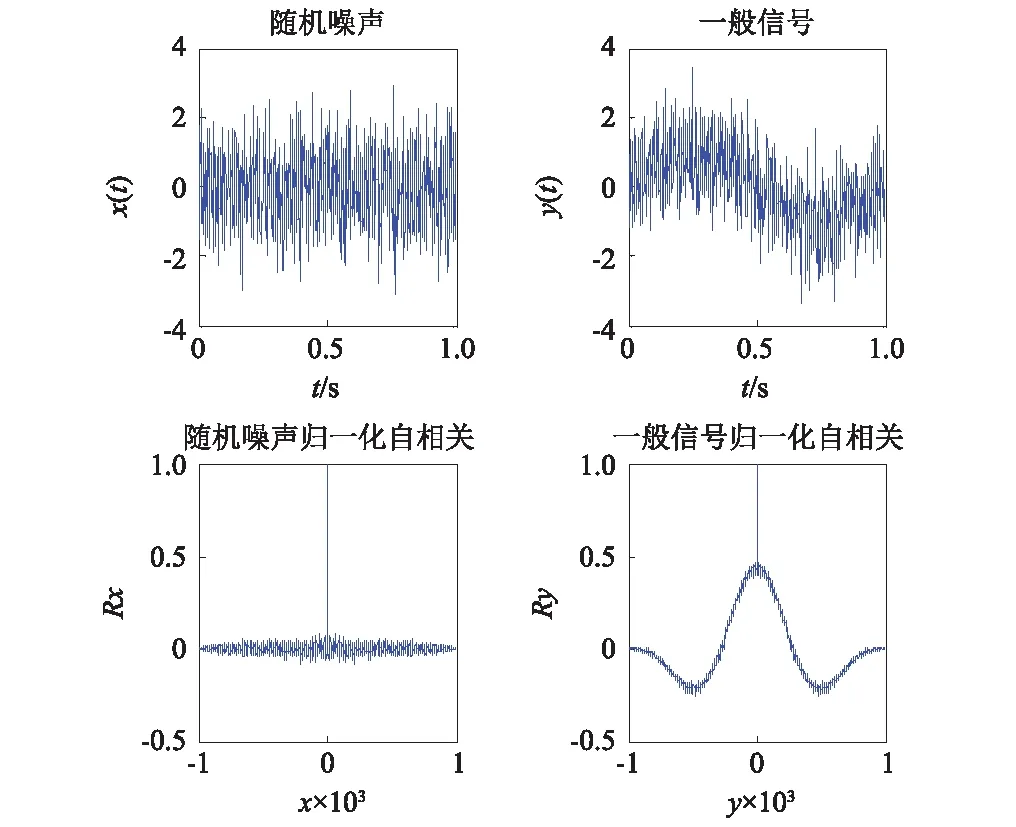
图1 随机噪声和一般信号的归一化自相关函数
对RTK监测位移信号处理流程如图2所示,其中采用AFEC混合滤波可分为两个步骤:
(1)首先使用切比雪夫高通滤波器来削弱多路径误差,利用有限元计算出试验桥梁的振动基频为0.83 Hz,从而设计通带频率为0.4 Hz的8 阶Ⅰ型切比雪夫高通滤波器,采用该滤波器处理RTK监测数据。
(2)然后采用以自相关函数为基础的EEMD滤波器削弱随机噪声,首先对信号进行总体经验模态分解,从而得到m个特征模态函数(IMFs)和一个残余分量Rm,对m个IMF分量分别进行自相关函数求解,并分别判断是否为噪声分量,最后将不是噪声分量的IMF分量和残余分量进行重构,得到经过AFEC滤波的信号。
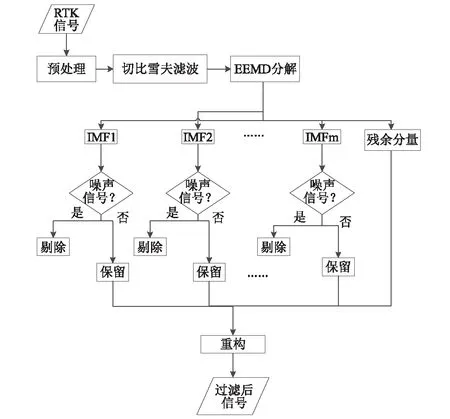
图2 RTK监测信号处理流程图
2 仪器精度试验研究
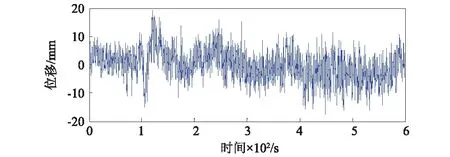
为检验所用仪器的精度和稳定性,在试验开始之前对所用仪器进行稳定性试验,采用3台GPS-RTK接收机在开阔的空地上进行试验,一台作为基准站,两台作为移动站,以相互验证。其中RTK接收机是中海达公司的海星达H32接收机,经过串口调试软件向主机发送命令的方式进行内部升级,将采样频率由1 Hz调至20 Hz,定位精度为平面±(10 mm+1 ppm),高程±(20 mm+1 ppm)。进行连续3个小时的数据采集,本文以桥梁结构的竖向位移为研究重点,其高程原始数据如图3。试验证明,调至20 Hz后的RTK接收机数据没有缺失,另外图3中可以看出,两台仪器的竖向精度均在20 mm以内,说明了仪器的精度是可靠和稳定的。
3 富民桥现场试验
3.1 富民桥概况和测点布置
坐落于天津市的中心城区的富民桥,其主桥是独柱单塔的自锚式悬索桥,悬索为空间索面,主跨的主缆索锚固于主梁的两侧,边跨的主缆索锚固于地锚。主跨主缆使用在立面和平面均为抛物线的三维空间线形,边跨主缆使用不加竖向吊索形式的两根并排的一组缆索。全桥总长340.3 m,主跨157.081 m,辅跨86.4 m。
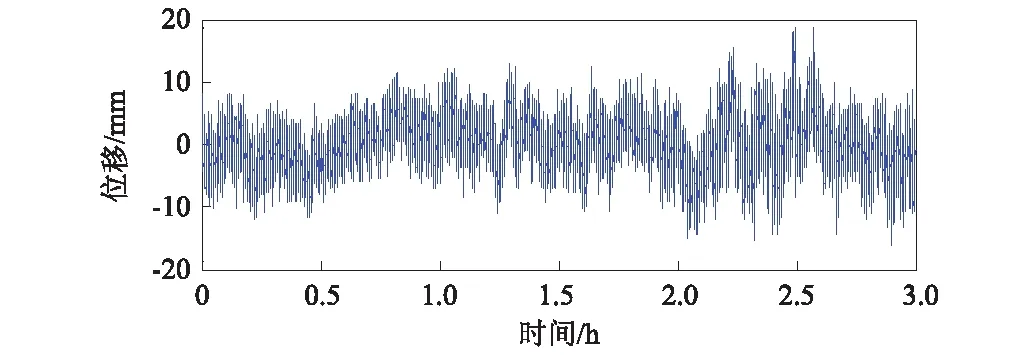
(a) 1# 测点高程数据
(b) 2# 测点高程数据
试验过程中使用2套GPS-RTK系统、2组加速度计(包含横向、纵向和竖向)、1台动态信号采集系统、3台计算机和发电机等设备,其中动态信号采集系统的硬件连接图如图4所示。本文采用WKD3827动态信号采集仪对动态加速度信号进行采集,此采集仪适合测点分布相对分散的工程测试场合,可直接连接如拾振器的电压输出型传感器,仪器每个通道采用独立24bits 模数转换器(ADC),具有较高的信噪比,保证每个通道同步采集。

图4 信号采集系统硬件连接图
根据富民桥结构特点和试验目的,对桥梁主跨进行监测,由于主跨长度为157.081 m,并不是很大,所以在主跨1/4和1/2位置设置2个监测点,如图5,将监测装置固定在人行道栏杆外侧。每个监测点布置1个GPS-RTK接收机和1组加速度传感器。设计GPS-RTK接收机和加速度传感器联合监测装置如图6(a),在对中杆的顶端安装RTK接收机,在拧式螺栓的中间卡入一块平板,将螺栓拧紧,并可以调节其高度,监测的试验过程中,将对中杆固定在桥面栏杆上,加速度计放置在钢板上,用气泡水平仪检测仪器的水平度(图6(b))。基准站设在距桥约500 m的平台处,如图7(a)所示,测点移动站如图7(b)所示。
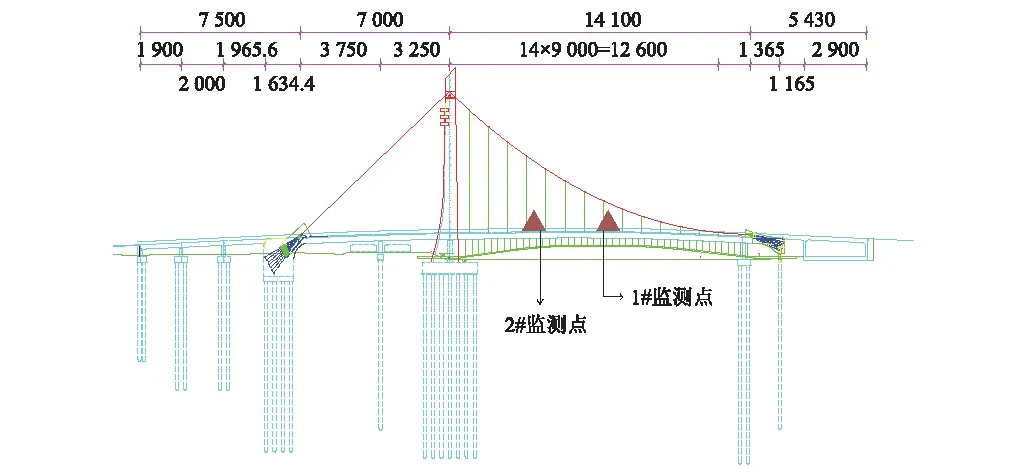
图5 富民桥正视图及测点布置
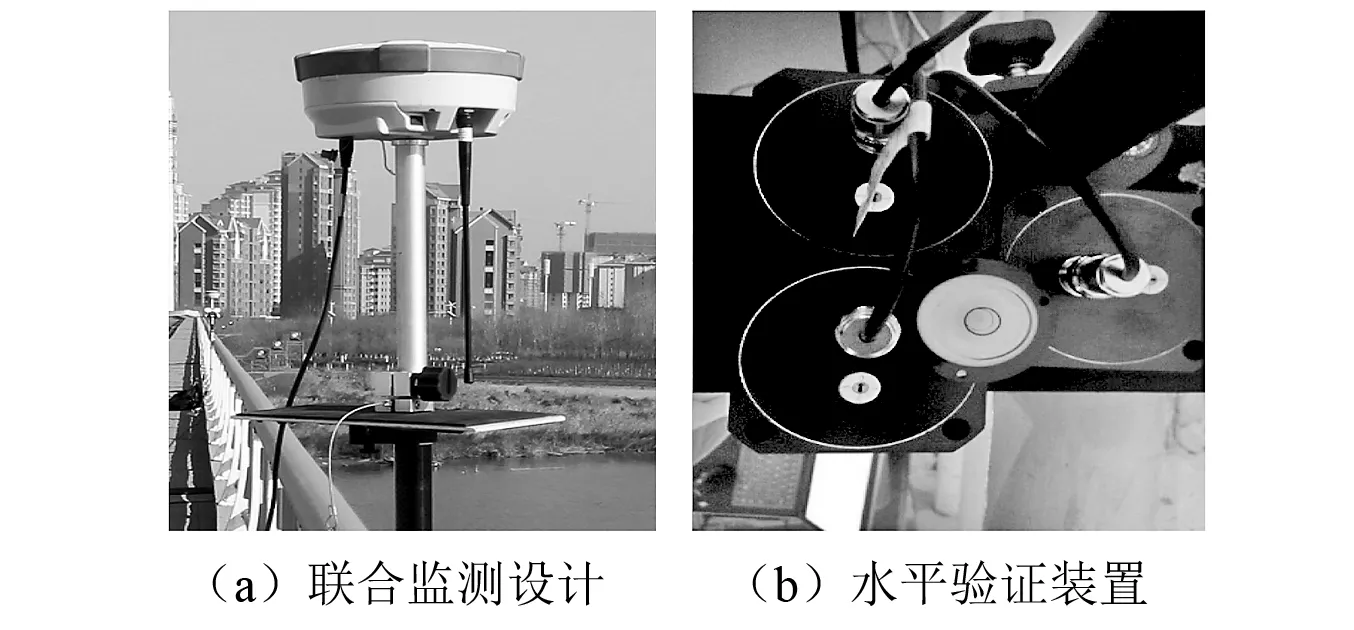
图6 RTK和加速度计联合监测装置
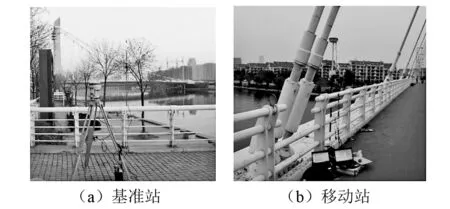
图7 仪器安装及布置
3.2 数据预处理
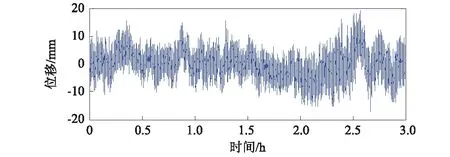
对富民桥在环境激励下的动态响应进行连续10个小时的实时监测,RTK传感器采集结构振动位移信号,同时加速度计实时采集结构振动产生的加速度信号。加速度计的采样频率为100 Hz。对原始数据的预处理包括首先按照3倍标准差原则(99.7%置信区间)剔除异常值,并使用三次样条插值对缺失的数据进行修补,然后应用滑动平均法进行平滑处理,得到预处理后信号。以跨中1#测点为分析对象,其原始竖向位移序列和预处理后信号,如图8所示。
3.3 AFEC方法提取动态位移序列
根据第2节,采用AFEC混合型滤波方法对预处理后的GPS-RTK数据进行处理。首先采用8阶I型切比雪夫高通滤波器消除多路径误差,滤波前后对比图如图9,然后对得到的信号进行EEMD分解如图10,得到12个固有模态函数分量和一个残余分量,对12个固有模态函数进行归一化自相关函数求解,得到图11。由图11中可以看出,前5个IMF分量符合随机噪声特征,可将剩余的7个IMF分量和残余分量R12进行重构得到AFEC滤波后信号,得到AFEC去噪后提取到桥梁结构真实振动波形图,如图12所示。
(a)原始位移数据
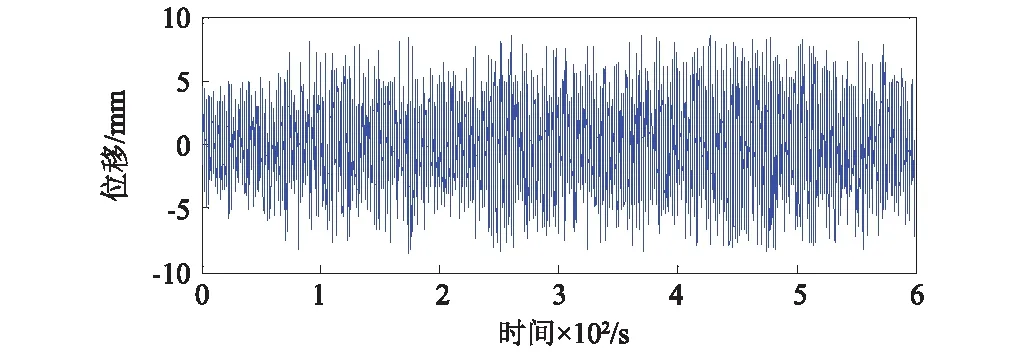
(b)预处理后位移数据
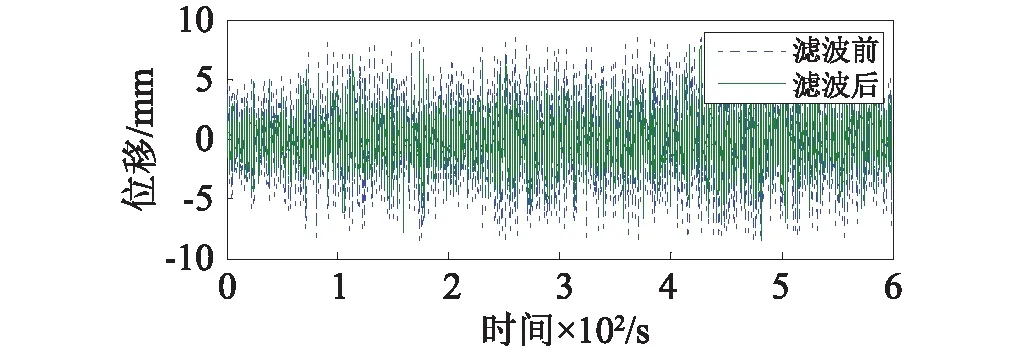
图9 切比雪夫滤波前后高程数据
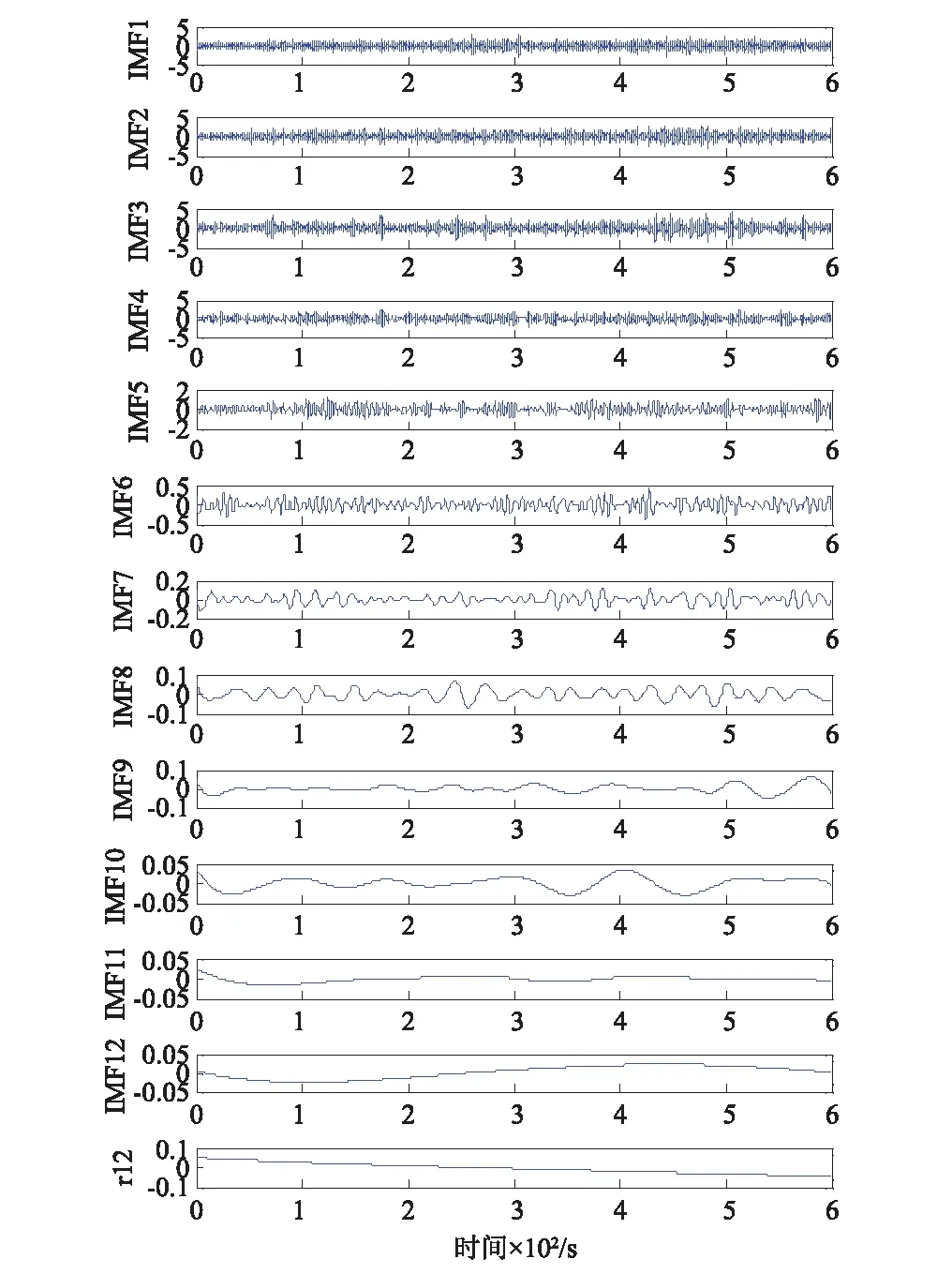
图10 高程数据进行EMD分解
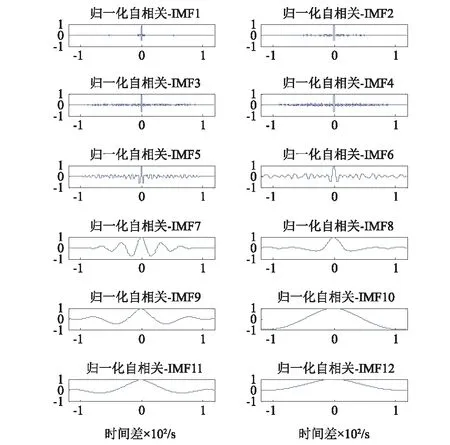
图11 IMFs分量的归一化自相关函数
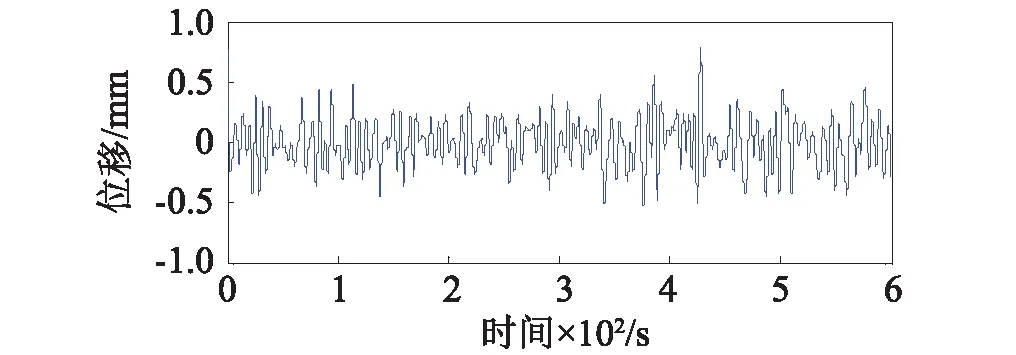
图12 位移信号经AFEC滤波后
同理,对同时间段的加速度信号进行预处理和切比雪夫滤波去除噪声,其原始信号和处理后信号如图13所示,由于加速度信号积分产生趋势项,所以对加速度积分得到的速度信号进行切比雪夫滤波去除趋势项,对速度积分得到的位移同样进行切比雪夫滤波去除趋势项,所得的位移信号与RTK监测得到的位移信号对比图如图14所示,可以看出,两者基本吻合,RTK监测数据稍微大一些,说明,RTK监测数据中仍存在一些随机噪声的影响。
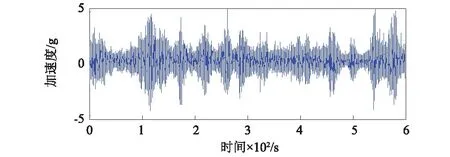
(a)加速度信号原始信号
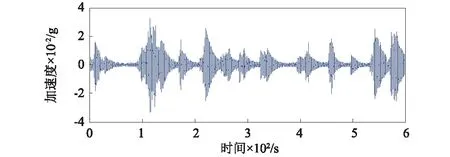
(b)滤波后加速度信号
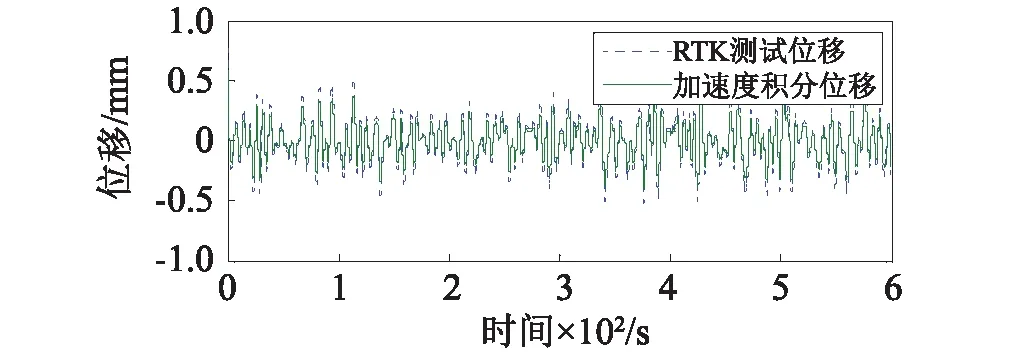
图14 测试与积分位移信号对比
4 结 论
设计RTK和加速度计联合监测装置,采用RTK技术和加速度计对天津市富民桥进行实时动态变形监测。通过对RTK接收机采样频率进行内部升级,由1 Hz调至20 Hz,提高了RTK用于变形监测的测量精度。设计基于自相关函数的EEMD滤波和切比雪夫滤波器相结合的AFCE混合滤波,对RTK监测数据进行处理削弱多路径误差和随机噪声,提取桥梁结构的真实动态位移序列。然后与加速度信号二次积分得到的位移信号进行对比,基本吻合。表明提出的AFEC混合滤波方法可有效去除RTK数据的多路径误差和随机噪声,可以更有效的识别桥梁结构振动位移,同时说明GPS-RTK技术在桥梁结构振动位移监测方面具有一定的工程实用价值。
随着GPS技术的进一步成熟,采样频率的提高,并且从数据测试与分析流程来看,GPS动态变形监测技术实施简单、灵活、方便,可进一步扩展应用到桥梁结构动态称重和损伤识别中,具有很好的应用前景。
