山区烤烟液肥深施机的设计
2019-05-27周茂茜李家春张宾宾
周茂茜,李家春,田 莉,张宾宾,张 雷
(贵州大学 机械工程学院,贵阳 550025)
0 引言
烤烟是我国经济作物中一项重要的农产品,是卷烟生产的主要原料,也是我国出口的大宗农产品之一。目前,国内农机市场中粮食类农作物的机械自动化程度较高,但与烤烟生产配套的机械设备有待发展。其中,液肥是烤烟生长的关键,不合理的施用引起的资源浪费、效率低下及环境污染等问题越来越受到重视。所以,在保证烟叶质量的同时,如何提高液肥施用效率是当下一项重要课题[1]。
作为烤烟主要产地之一的贵州省,种植面积为18.3万hm2,占全国种植面积的14.9%,产量占全国的13.0%[2],规模较大;但机械化施肥水平不高,烟草施肥环节常常由人工施肥或简单机械施肥,施肥方式的粗放和施肥量的不均常常导致烟草作物烧苗或营养缺失,肥效利用率低,长期会导致土壤肥力失衡和土壤板结[3]。液肥浅施常导致化肥挥发、肥效利用率低,不利于作物根系对养分的吸收,达不到增产增收的效果[4]。贵州属于喀斯特地形,各地海拔高低不一,地貌复杂,山岭崎岖, 沟谷纵横交错,坡陡谷深,平地少[5],且缺乏合适的烤烟液肥深施装置,一直是困扰山区烤烟施肥的一个重大问题。为此,针对山区复杂地形下的烤烟施肥,研制了一款山区烤烟液肥深施机,以末端施肥枪对烤烟进行分株施肥,且可根据田间目标烤烟的具体位置及高度进行调节。
1 整机结构与工作原理
1.1 整机结构
目前,田间施用液肥时常用的背负式喷肥器,因容积太小不便于成片区施肥且背负压力对劳动力有要求,所以在背负式喷肥器结构基础上进行了改进。该液肥深施机主要由肥液供给装置、田间自适应调节装置和施肥装置组成,如图1所示。
1.四驱农用车 2.太阳能板 3.储肥罐 4.自动回收绞盘 5.吊杆 6.滑轮 7.输肥软管 8.变量控制系统 9.施肥枪 10.绕管机图1 山区烤烟液肥深施机结构Fig.1 The structure of deep application machine for flue-cured tobacco fertilizer in mountainous area
其中,肥液供给装置由储肥罐、过滤器、手动阀、电磁阀、输液管路及液泵等部件组成;田间自适应调节装置由自动回收绞盘、调节吊杆、转动机构及三脚架等组成;施肥装置主要由变量控制系统和施肥枪组成。
山区烤烟液肥深施机主要技术参数如表1所示。
表1 山区烤烟液肥深施机主要技术参数Table 1 Main technical parameters of deep application machine for flue-cured tobacco liquid fertilizer in mountainous area
1.2 工作原理
山区烤烟液肥深施机由四驱农用车提供动力,施肥时,农用车停至田间路上,肥液供给装置设在四驱农用车厢内;其液泵将罐中肥液依次通过Y型过滤器、手动阀、电磁阀吸入三通管,三通管一出口接输肥软管,另一出口通过溢流阀接泄压回路。农用车驾驶室上方设有太阳能板,为肥液供给装置提供总动力。
该液肥深施机终端用流量可采集的小桶模拟施肥枪作业,原理如图2所示。作业时,肥液随输肥软管经绕管机拖至田间自适应调节装置上,实现远距离输肥;输肥软管通过宝塔式接头连接自动回收绞盘,绞盘输肥软管末端经吊杆上的一组输肥管限位器与施肥人员手中施肥装置连接,换垄施肥时自动回收绞盘软管,经外力轻拉可自动收缩,绷紧软管。施肥装置依然设有溢流阀、电磁比例调节阀及定量齿轮泵,避免远距离输肥时前端的相同管道器件动作滞后,保证远距离施肥作业的顺畅。施肥装置控制系统背负于施肥人员腰部,手持施肥枪进行分株施肥。施肥时,由电磁比例调节阀进行流量的调节,施肥人员只需操作界面上的控制按钮预设流量及施肥枪上的施肥开关进行施肥,流量达到预设流量施肥枪自动关闭,最终实现精准变量施肥。
图2 施肥工作原理简图Fig.2 The working principle of fertilization
2 关键部件设计
2.1 肥液供给装置
肥液供给装置是本机的起始输肥装置,随四驱农用车停至烟地田间路上,由储肥罐、输送管道及泄压回路组成。其中,储肥罐呈圆柱形,按照烟农施肥经验整理得容量需2 000L,罐中液肥杂质易沉淀,故需要搅拌功能。传统搅拌方式均采用电机搅拌,通常在施肥作业连续进行时采用;本机针对山区烤烟分株施肥,工作有间歇期,故设计了一种新型搅拌方式—泄压回路搅拌法。工作时,设备液泵持续不断工作,前端施肥间歇工作;因间歇期管路压力明显增大,溢流阀便开始工作,回路开始泄压,肥液再次回到储肥罐,起到搅拌肥液的作用。肥液供给装置和农用车装配结构建模如图3所示。
图3 肥液供给装置三维建模Fig.3 The three-dimensional modeling of fertilizer and liquid supply device
2.1.1 肥液供给装置结构设计
肥液供给装置的输送管道由Y型过滤器、手动阀、电磁阀、液泵及转接接头组成。其中,Y型过滤器输送有杂质的液体必需的一种过滤装置,一般置于液体入口端,过滤掉液体中的杂质,起到保护阀门、泵等管路器件的作用。在储肥罐与泵之间依次连接手动阀和电磁阀,手动阀便于设备维修时使用,电磁阀的通断满足施肥人员肥液的间歇需求。输肥装置结构如图4所示。
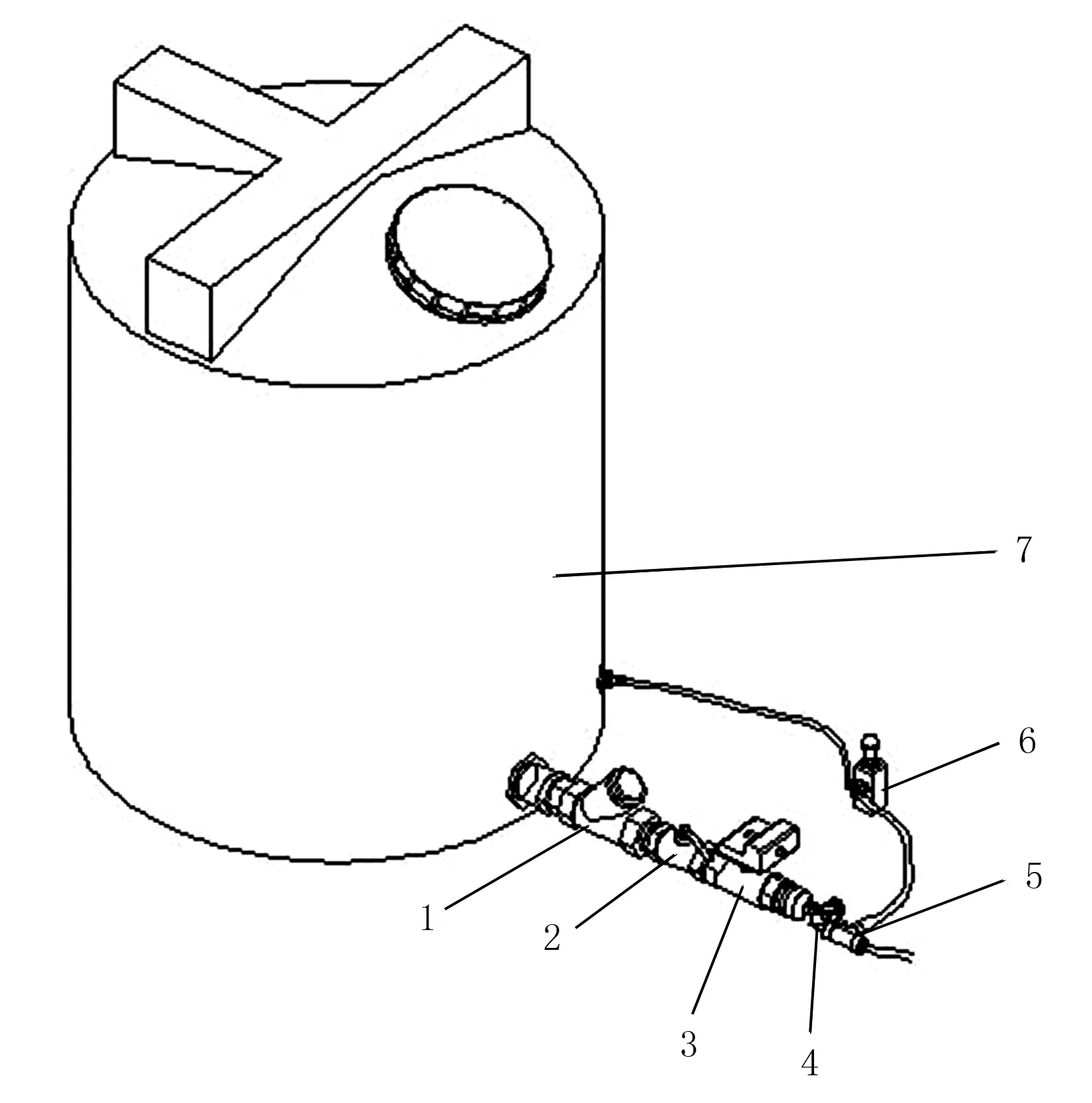
1.Y型过滤器 2.手动阀 3.电磁阀 4.液泵 5.三通管 6.回路溢流阀 7.储肥罐图4 肥液供给装置结构Fig.4 Structure of fertilizer conveying device
2.1.2 输肥装置主要参数设计
输送管道是输肥装置设计的核心部分,而设计管路的基础是要确定管径和壁厚的两个基本参数。其中,管径主要由管内流体的流量和流速同时决定:管径太大,设备质量和成本随之加大;管径太小容易引起管内流速增大,升温快,能损快,最终产生气穴现象,引起流体泄漏、管道震动和噪声等问题[6]。
管内允许流体流速是计算管径的重要参数,在压力管路中,一般取ν=2~7m/s。压力较高或者管道较短时取大值,压力较低或者管道较长时取小值。因本机液泵的压力较高且输送管道较短,故取肥液流速为5m/s,管道内径计算公式为
式中d—管径(mm);
q—流经管路最大流量(L/min);
v—管路允许流速(m/s)。
本设备采用流量1 560L/h的液泵,分别将管路允许流速和管路最大流量带入上述公式,且按有关标准圆整可得管径d=15mm。
对于金属管件,还要按受拉伸壁筒公式计算壁厚,管道壁厚由管径、最大工作压力和管道许用应力共同决定。因壁厚过小管道安全性降低,过大设备成本和质量随之增大,所以要合理设计管道壁厚[7]。管道壁厚计算公式为
式中δ—金属管壁厚(mm);
d—管路内径(mm);
p—管内最高工作压力(MPa)。
本设备液肥具有一定的酸碱性,故选用管路材质为304不锈钢材质,管路内径和最大工作压力已知,将以上条件代入公式可得管道壁厚δ=1.642mm,根据国标选择壁厚2.5mm,管道元件通径和管道壁厚由此确定。
2.2 田间自适应调节装置
施肥装置在田中通过加长输肥软管与肥液供给装置连接进行施肥,施肥作业要求如下:①在施肥范围内保证输肥软管不能压塌烟叶;②可在该装置方圆50m范围内全方位施肥;③田间输肥软管长度可伸缩。为满足上述要求,对本机核心部件—田间自适应调节装置进行设计,结构简图如图5所示。主要由三脚架、转动机构、自动回收绞盘及可调节吊杆等组成。其中,选用自动回收绞盘软管经外力轻拉可自动收缩,绷紧软管。自动回收绞盘如图6所示。为使该装置在田间稳定固定,在三脚架的下端焊接有支撑脚,支撑脚与土壤间用钻地螺栓连接,根据田间试验,三脚架高度设计为1.5m;且中间的立柱设有一组插销孔,可通过U型插销进行该装置0.5m范围内的高度调节,避免输肥管起始高度较低导致远距离施肥时输肥软管压塌烟叶。
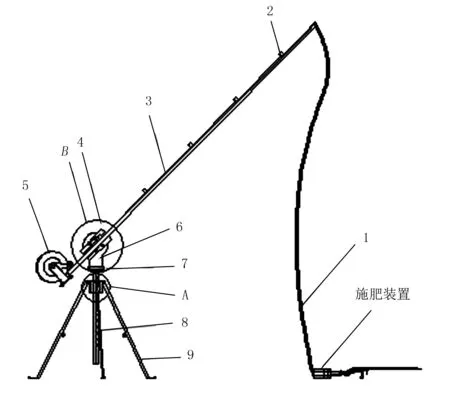
1.输肥软管 2.定滑轮限位器 3.吊杆 4.固定滑槽 5.自动回收绞盘 6. 支撑板 7.转动机构 8.三脚架 9.立柱图5 田间自适应调节装置结构Fig.5 The structure of field adaptive adjustment device

图6 自动回收绞盘Fig.6 Automatic recovery capstan
该装置中A(见图5)处转动机构如图7所示。其包括与立柱顶端连接为一体的台阶轴,在台阶轴上由下至上依次套有推力球轴承、支撑框架及圆锥滚子轴承,且圆锥滚子轴承的外圈与支撑框架内的轴承套筒过盈配合,支撑板固定安装在支撑框架的顶部;通过推力球轴承和圆锥滚子轴承的组合,起到承载力作用的同时保证转动效果;施肥枪可随施肥人员围绕田间自适应调节装置360°转动实现成片区施肥。
该装置中B(见图5)处的可调节吊杆由支撑板、固定滑槽、吊杆等组成,如图8所示。其中,支撑板通过螺栓固定在转动机构上,支撑板的头部为圆盘形结构,支撑板的头部圆周上有3组定位孔,在固定滑槽上设有与定位孔对应的销钉孔,销钉穿过定位孔和销钉孔后将固定滑槽与支撑板固定连接。
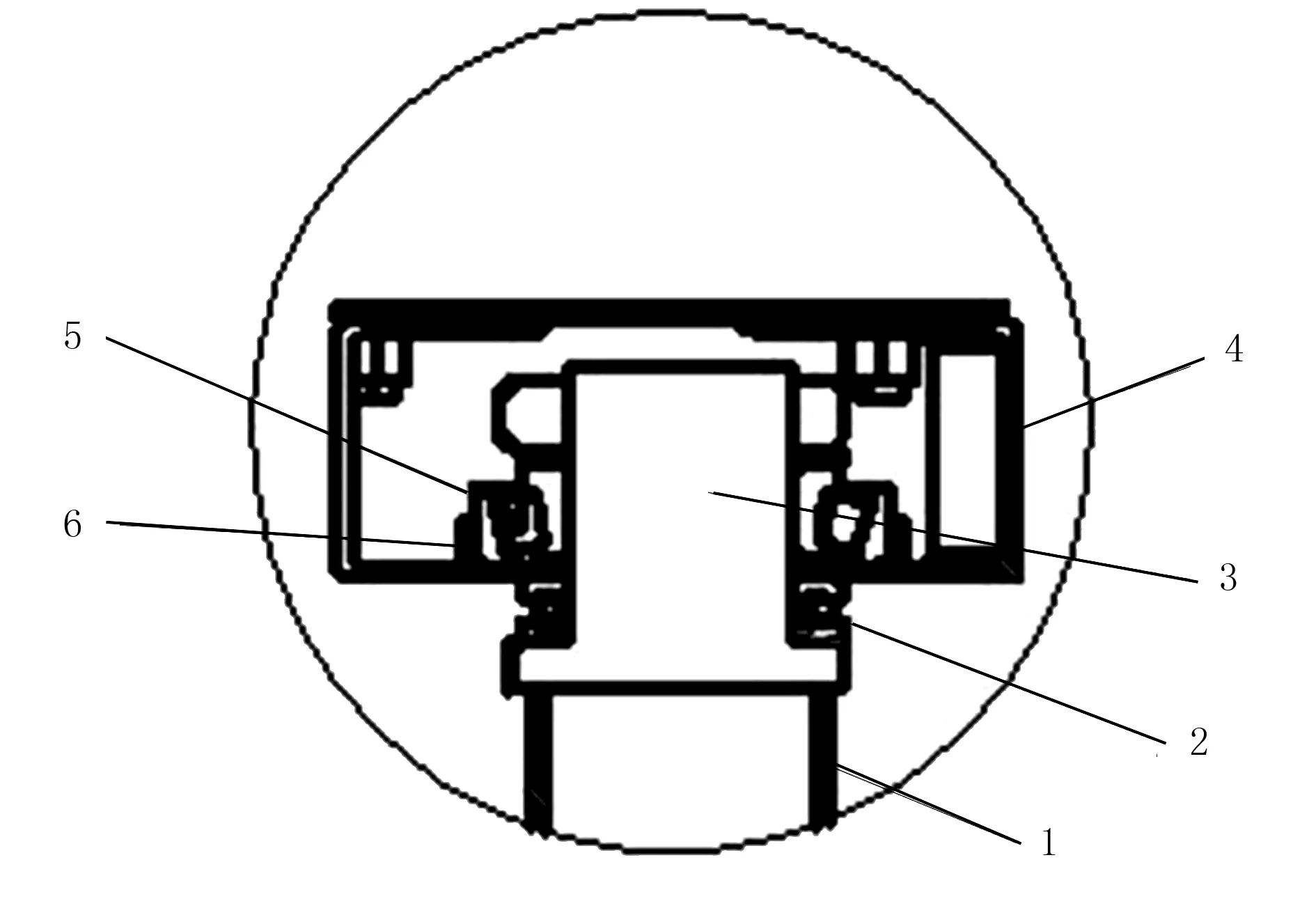
1.立柱 2.推力球轴承 3.台阶轴 4.支撑框架 5.圆锥滚子轴承 6.轴承套筒图7 A处转动机构Fig.7 Rotating mechanism at point A
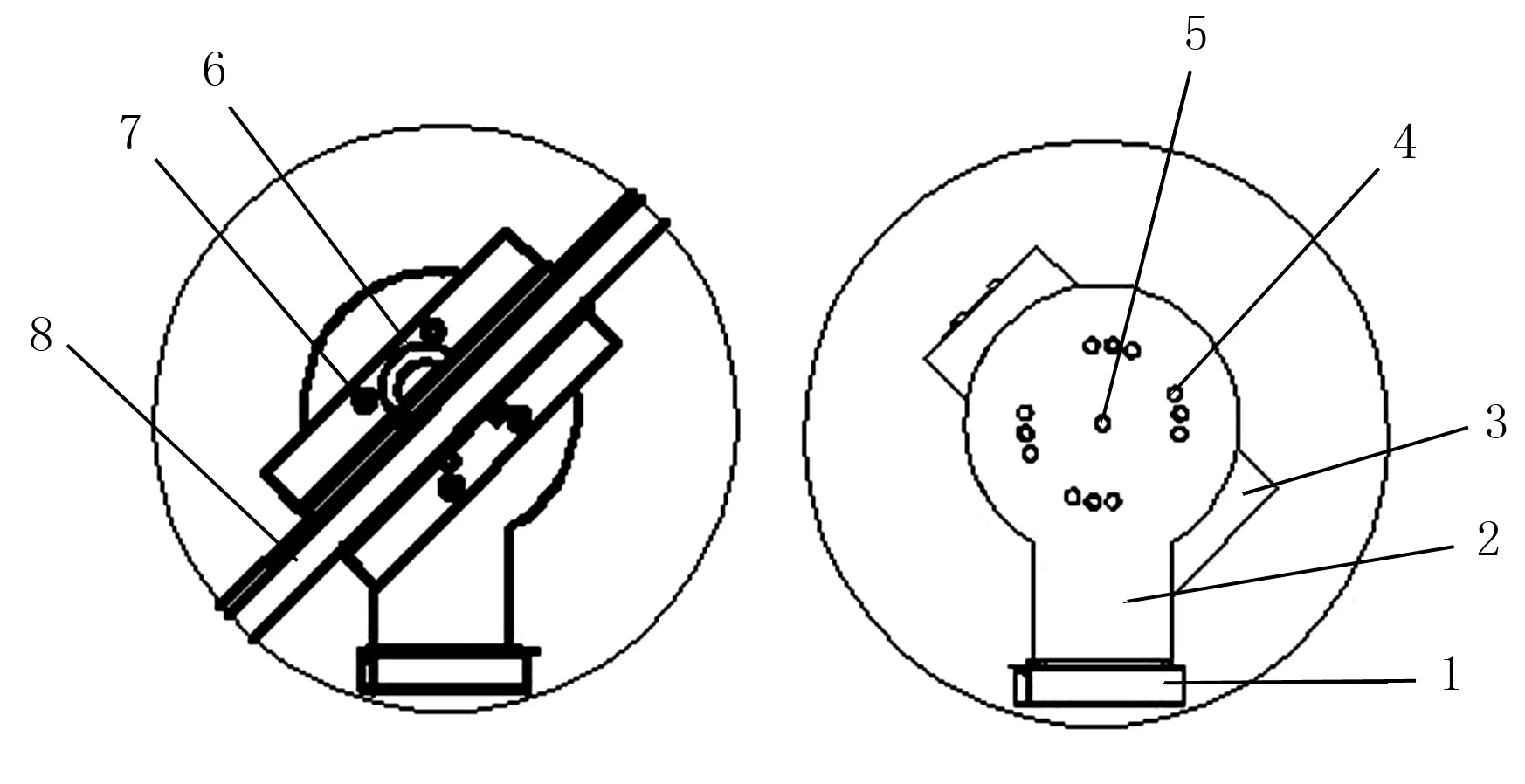
1.转动机构 2.支撑板 3.固定滑槽 4.定位孔 5.转轴 6.U型插销 7.销钉 8.吊杆图8 B处可调节吊杆结构Fig.8 The derrick structure can be adjusted at point B
装置杆件结构材料均采用铝合金-5A06铝板进行加工制造,为Al-Mg系防锈铝,具有较高的强度和腐蚀稳定性。其中,吊杆可调节自身角度,调节角度为30°、45°、60°,根据实际施肥范围决定输肥软管起始高度调节吊杆角度,避免在施肥过程中输肥软管因重力作用压塌烟叶。吊杆是整个田间自适应调节装置的受力杆,根据田间试验及优化设计,吊杆长5.6m;采用中空结构,厚度2mm。施肥作业时从前端的20kg的自动回收绞盘拉出输肥软管,穿过吊杆上的一组定滑轮限位器(均匀分布6个)直至拉至地面与施肥装置连接进行施肥,施肥过程吊杆前端承受绞盘压力,末端承受软管拉力,故需对吊杆进行强度分析。
吊杆的强度分析应建立在极限位置处方圆50m内,故将施肥枪带动输肥软管拉至水平距离离该装置25m处进行吊杆末端受力的测定试验。吊杆将角度调节至30°、45°、60°,实验结果如表2所示。其应力、应变及整体变形云图如图9~图11所示。
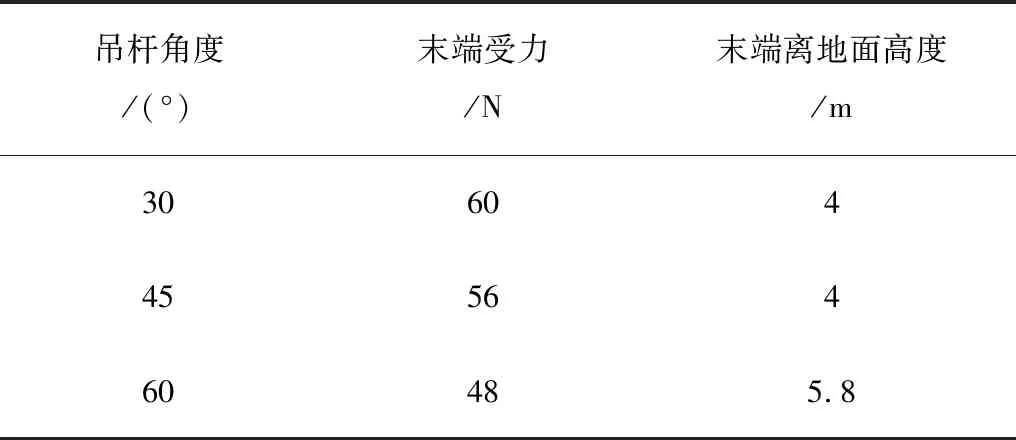
表2 调节吊杆实验数据Table 2 Experimental data of adjusting derrick
由表2可知:末端滑轮处所受拉力最大为60N,故仅需将调节至30°吊杆的三维模型导入ANSYS Workbench中进行静应力分析。由图9可知:最大应力58.63MPa出现在U型销与固定滑槽相连接处,小于160MPa;由第四强度理论可知,吊杆强度满足设计要求,且有足够的应力储备,所以设计是安全可靠的[8]。
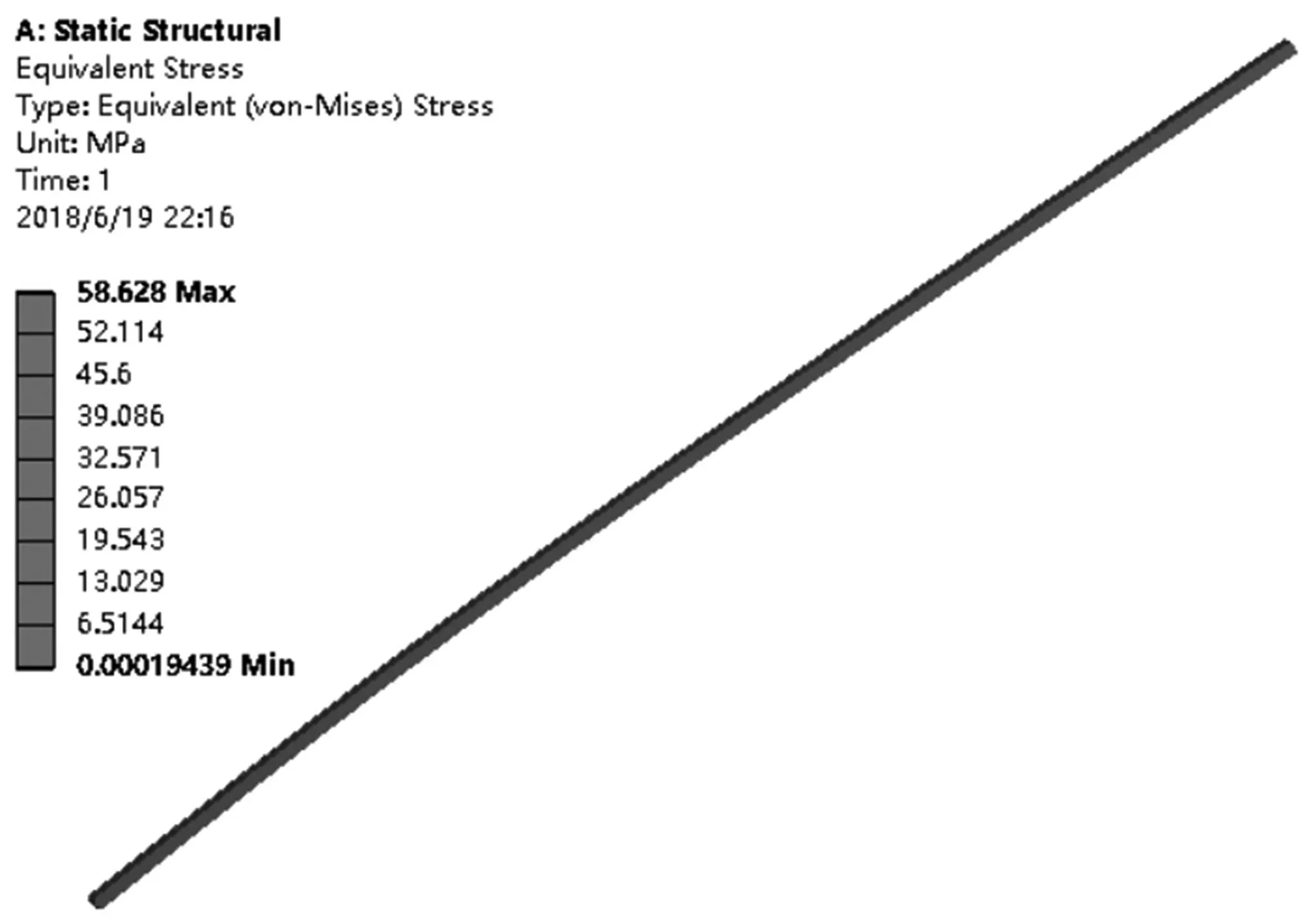
图9 等效应力云图Fig.9 The cloud map of equivalent stress
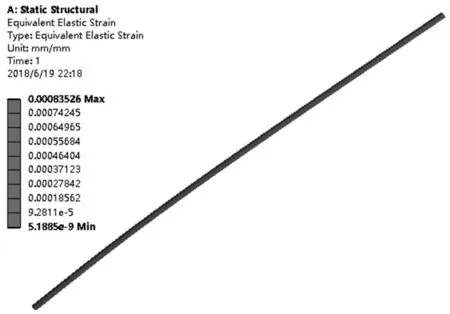
图10 等效应变云图Fig.10 The equivalent strain cloud diagram
从图10和图11可知:吊杆最大应变量出现位置与最大应力出现位置相同,最大应变值为0.000 84,应变量较小;整体最大变形出现吊杆末端,最大变形值为78.01mm,可知吊杆整体变形量较小,其刚度满足静力作用下结构设计要求。
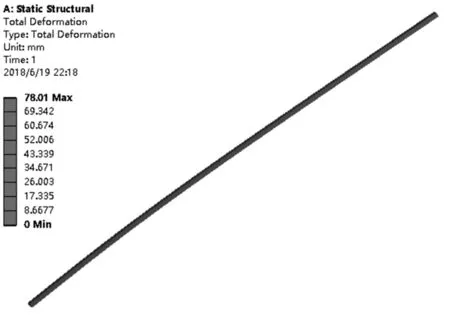
图11 整体变形云图Fig.11 The overall deformation cloud map
2.3 施肥装置设计
深根施肥的常见机械方式主要是刨坑施肥,容易对毛细根系造成损伤,而毛细根系则是作物吸收养分的主要部分,所以采用施肥枪深根施肥,可保证整个施肥过程中的肥液集中且位置恰当,最终实现烤烟增产。施肥装置由电磁比例调节阀、溢流阀、定量齿轮泵及施肥枪组成,其结构简图如图2中施肥装置系统所示。
枪结构主要由手持枪把、手动开关、按钮开关、施力手柄、枪杆、施力脚柄、枪尖及喷水孔组成,施肥枪总高1.08m,如图12所示。
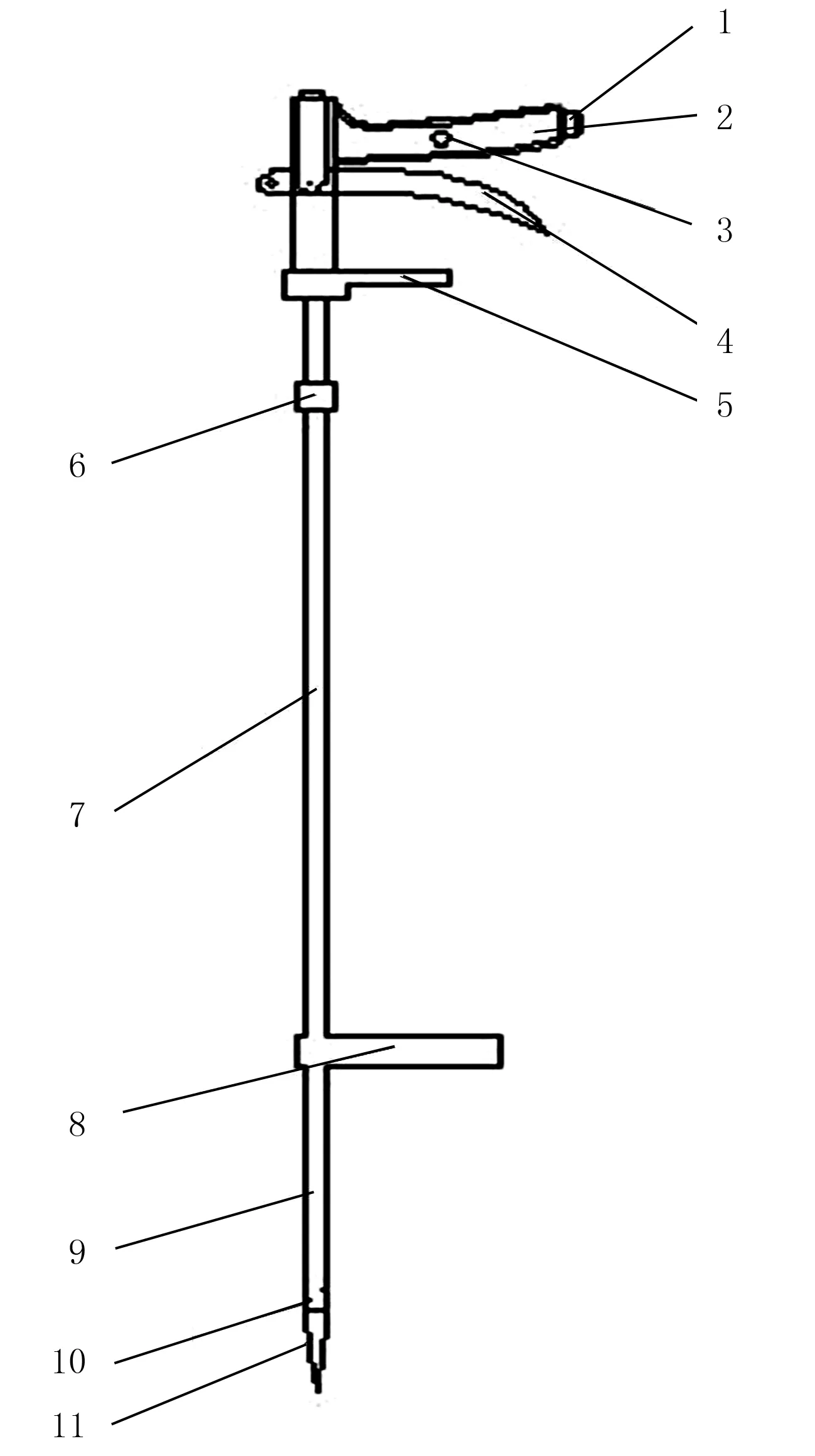
1.输肥软管接头 2.枪把 3.按钮开关 4.手动开关 5.施力手柄 6.流量传感器 7.枪把 8.施力脚柄 9.枪头 10.喷肥孔 11. 枪尖图12 施肥枪结构图Fig.12 The fertilizer gun structure drawing
枪把顶端有与输肥管接头相连的螺栓,枪尖处有一组喷肥孔(4个),加力脚柄处可加力且可限制施肥深度[9],施肥深度设计根据烤烟要求最高可达0.2m。其中,施肥枪上的按钮是施肥控制系统电磁阀的通电开关,即施肥开关,施肥人员开启施肥开关后,控制系统在流量传感器采集到预设流量后自动断电,电磁阀关闭,实现变量施肥。施肥枪上的手动开关可在控制系统出现故障时进行机械施肥,最终实现施肥枪的手动和自动施肥。
3 控制系统设计
为实现施肥枪变量施肥,变量控制系统背负在施肥人员腰部,通过施肥枪上的施肥开关按钮即可进行施肥动作。该控制系统以单片机为控制单元,以电磁比例调节阀为执行元件[10]。通过设置单片机的PWM控制寄存器产生脉冲可调的PWM波,对电磁比例调节阀的输入电压进行脉冲调制;因电压不同,电磁阀开度不同,流量输出也就不同,最终实现流量调节。单片机通过流量传感器采集实际流量信号,根据该信号在其内部采用数字PID算法对PWM控制寄存器的值进行修改,从而实现精准变量控制[11]。
本系统选用的单片机模块是STC89C52RC芯片,是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有8kB字节系统可编程Flash存储器。控制部分主要完成电磁比例阀的驱动,由键盘输入预设施肥量且通过LCD的显示;执行部分完成电磁比例阀的调节,可接收经单片机D/A转换后的电压信号[12]。控制系统硬件组成如图13所示。
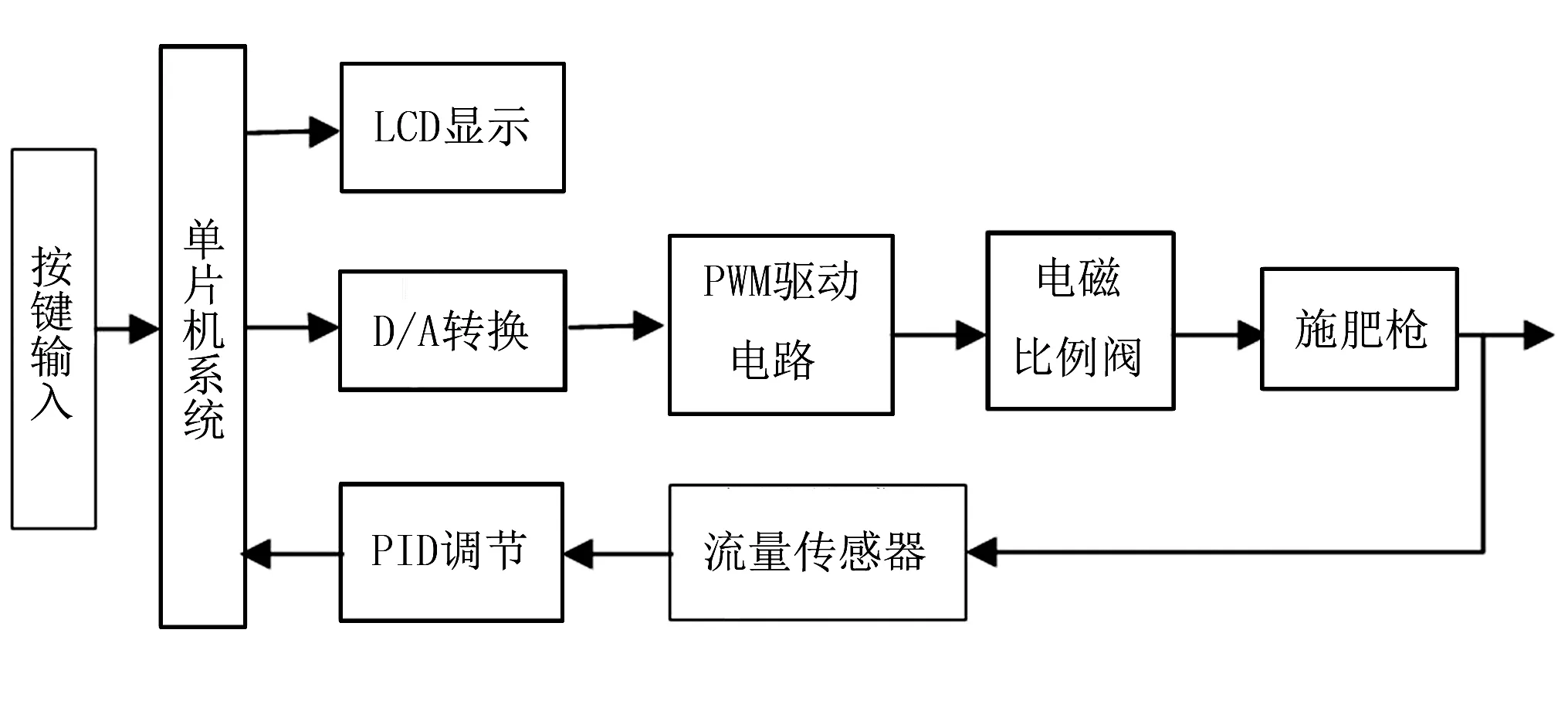
图13 硬件系统组成框图Fig.13 Hardware system composition block diagram
该控制器的软件程序由C语言编写,并应用德国Keil公司开发的Keil uVision5软件对程序进行编译,程序流程如图 14所示[13]。控制过程仅需施肥前进行流量调节,按钮操作并通过LCD屏显示预设流量值;然后,按施肥枪开关按钮给电磁比例调节阀通电,直至流量传感器检测且通过PID算法修正流量达到预设流量值,系统自动关闭,从而实现精准变量施肥。
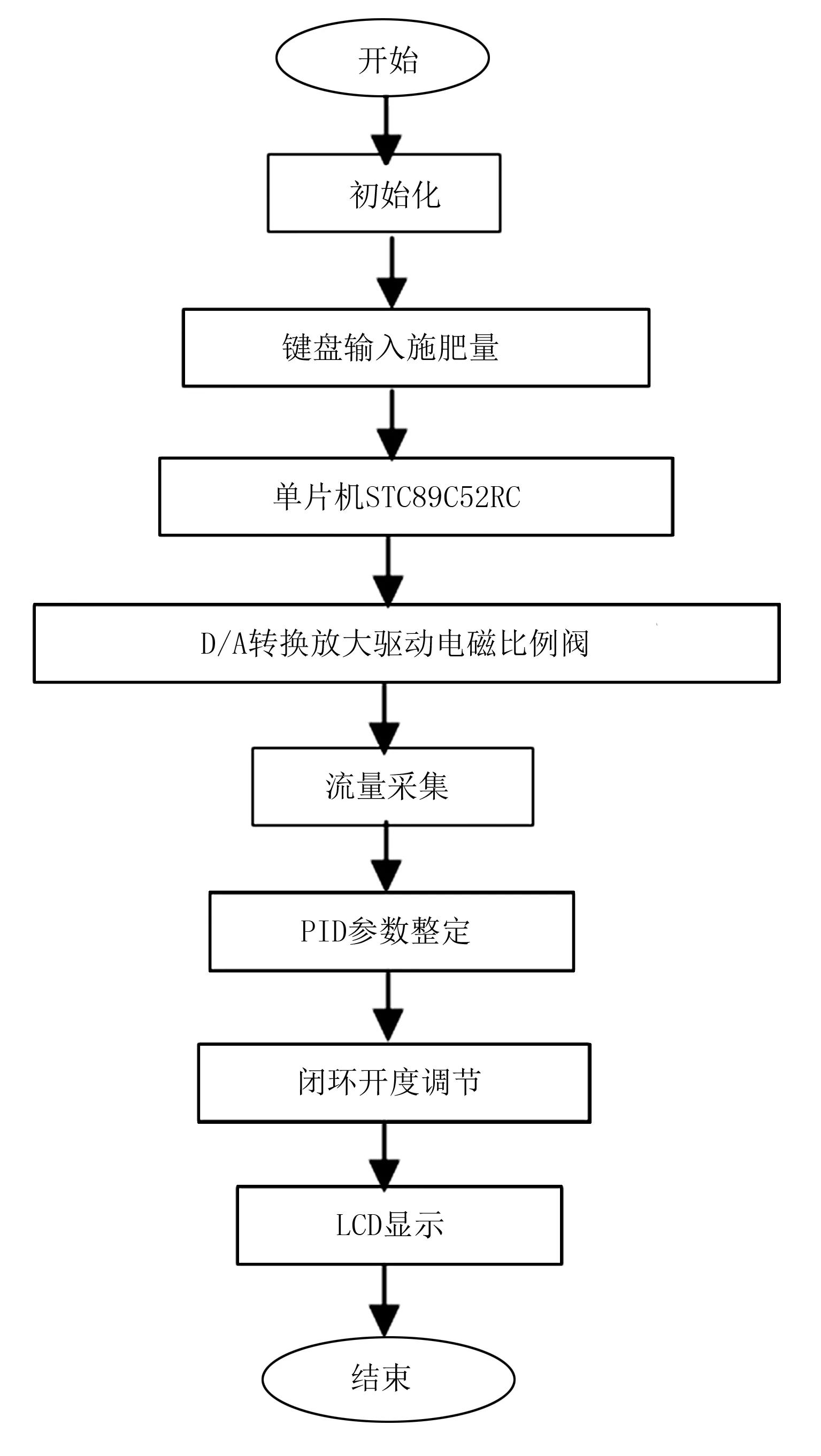
图14 控制系统流程图Fig.14 Flow chart of control system
4 试验结果
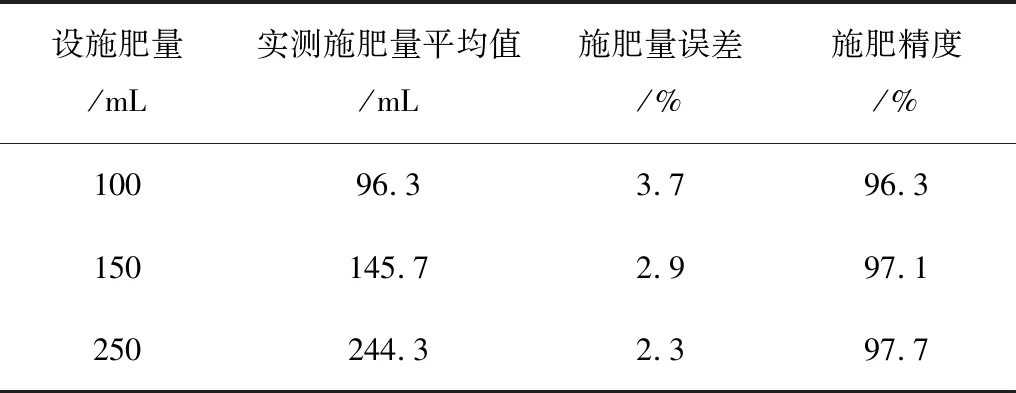
山区烤烟液肥深施机开始工作时,肥液供给装置停至贵州山区田间路上,田间自适应调节装置通过钻地螺栓将之固定于地里,施肥控制系统背负于腰间,手持施肥枪进行施肥作业。根据烟农经验及贵州省烟草科学研究院所给数据,烤烟生长期所需肥料最低需要50mL/株,最高需要250mL/株,施肥量根据生长期不同,所需肥料也不同。本试验采用容量为250mL的量筒测量喷肥量,施肥枪将液肥喷施至量筒内,在按钮操作界面中预设施肥量后,启动电磁比例调节阀和齿轮定量泵,测量实际施肥量,设定5组预设值,每组预设值对应的实际施肥量均采集3次取平均值,测得施肥量偏差及施肥精度。试验结果与分析如表3所示。
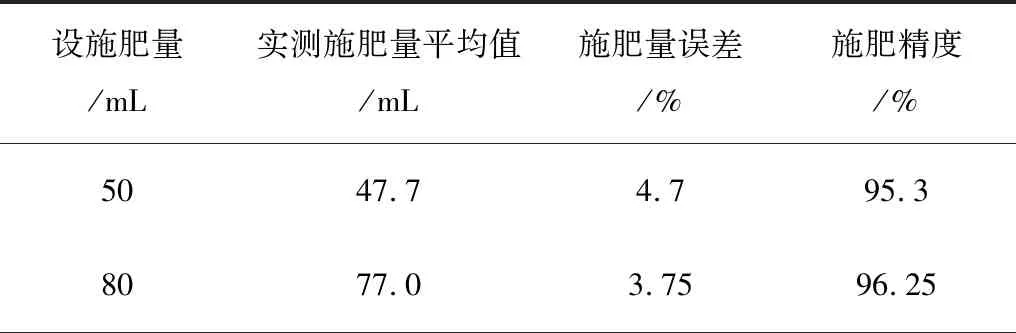
表3 施肥枪实验结果与分析Table 3 Results and analysis of fertilizer gun experiments
续表3
从表中3可看出:施肥精度最高可达97.7%,最低可达95.3%。这表明施肥枪控制系统设计合理,可满足山区复杂地貌的烤烟施肥。其产生误差的主要原因是长距离输肥的管路器件及电磁比例调节阀动作滞后。
5 结论
1)设计了山区烤烟液肥深施机,可在山区复杂地形田间方圆50m范围内进行施肥。针对受力杆件—吊杆进行静应力分析得知,杆件强度设计安全可靠,刚度满足结构设计要求。
2)该液肥深施机可在作业过程中根据所需施肥量进行预设调节,达到了液肥精准变量施肥的目的。
3)试验结果表明:该液肥深施机及其控制系统设计合理,施肥精度最高可达97.7%,最低可达95.3%,施肥量最大误差为4.7%,低于烟草行业规定的8%。
