甘蔗收获机刀架结构振动性能分析和优化设计
2019-05-27李尚平莫瀚宁杨代云
邱 辰,李尚平,莫瀚宁,杨代云
(1.梧州学院 机械与材料工程学院,广西 梧州 543000;2. 广西大学 机械工程学院,南宁 530004;3.广西民族大学 信息科学与工程学院,南宁 530006)
0 引言
我国甘蔗机械化收割作业中切割质量差的甘蔗宿根断面处存在较多的台阶、裂纹,容易造成宿根破头,从而影响翌年宿根出芽率,降低甘蔗产量[1]。
甘蔗收获机工作时,刀盘高速旋转,单根甘蔗往往不能被刀片一次性砍断,而是要经过刀片的多次砍削。刀片砍蔗机理类似于金属铣削机理[2-3]:随着收获机不断前进,逐步增大刀片对甘蔗的砍入量,最终砍断甘蔗。刀片第1次砍蔗后,蔗径上会留下裂口;第2次砍蔗时,由于刀架的振动,刀片与蔗径的接触位置较第1次会发生变化,两个切口间存在位置差,差值大小会受到刀架振动剧烈程度的影响,工作环境较恶劣时,刀架振动较大,位置差值增大,切口处的裂纹条数、裂纹长度、裂纹厚度及砍肩高度都将会变多变厚,甘蔗切口质量下降。同理,第3、4次砍蔗后的蔗径切口质量也会受到刀架振动的影响。其次,在砍蔗过程中,由于刀架存在上下跳动,刀片对甘蔗的切削力方向也会改变,使得甘蔗切口不平整,出现台阶,甚至会导致蔗径破裂。图1为利用高速摄像仪对砍蔗过程拍摄的图片。
由图1可知:刀架在竖直方向的振动情况将会直接影响到甘蔗宿根的切割质量。
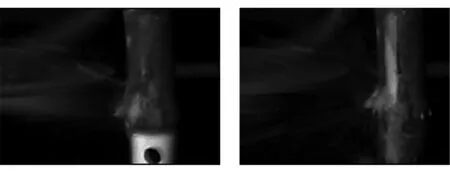
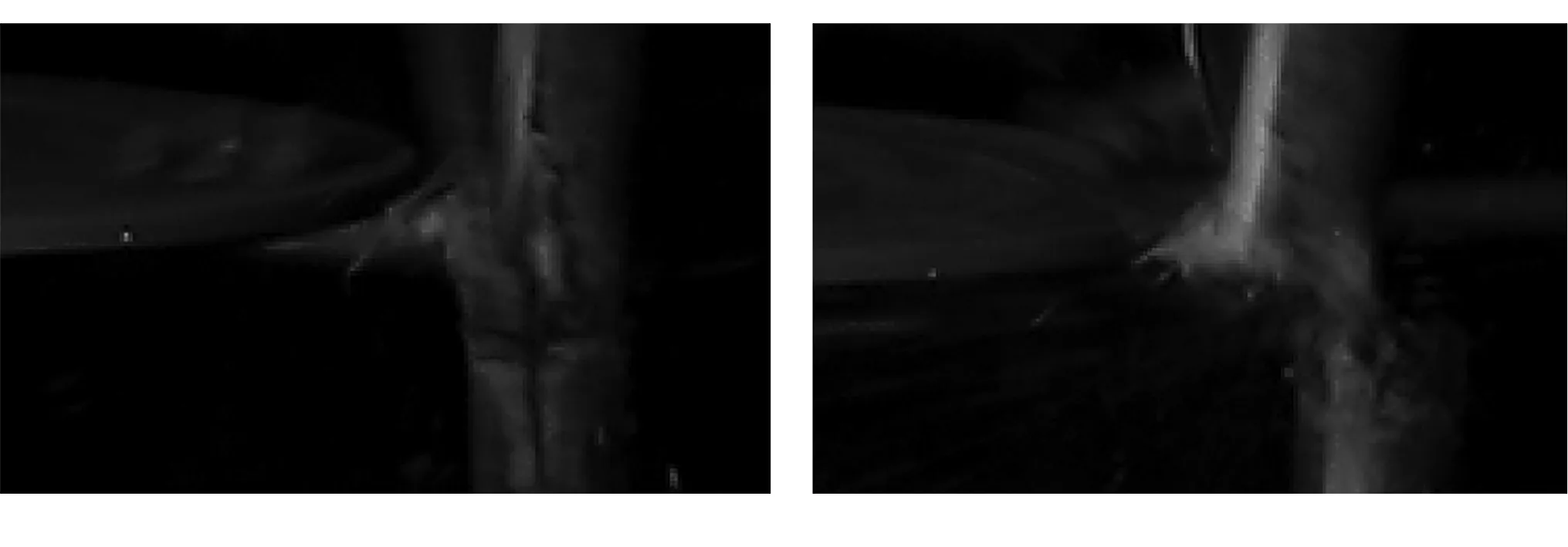
图1 高速摄影Fig.1 High-speed photography
1 路面振动激励源分析
1.1 路面激励
人为设定路面基准高度,路面相对于该基准的高度q,沿着道路走向的长度L的变化q(L)量称为路面不平度,如图2所示。路面不平度具有影响车辆行驶性能、行驶质量及行驶时的动力载荷的作用。
甘蔗收获机在田间工作时,通过各种复杂的路况,将会受到来自蔗地的各种复杂激励的作用,整机将会发生各种振动。收获机长期受到路面激励作用时会严重影响到收获机上零部件的工作性能,使得一些主要部件过早地出现疲劳破坏,大大缩短甘蔗收获机田间工作的效率及使用寿命。同时,凹凸不平的路面也会使得收获机轮胎与地面的附着力降低,不利于机手操作,收获机容易发生侧翻。其次,课题组前期研究发现:收获机刀盘的刚性与甘蔗宿根切割质量成正相关,即刀盘振动越大,宿根切割质量越差,过大的振动将严重影响到甘蔗来年的生长;收获机砍蔗过程并不是单刀切断甘蔗,每根甘蔗经过3~4次刀盘的砍削以后,才会折断。砍蔗过程中刀盘如果存在振动,刀片每次与甘蔗的接触位置不同,会导致切口出现裂口,降低砍蔗质量。因此,研究蔗地路谱对进一步提高甘蔗收获机砍蔗性能具有重要的意义[4-6]。
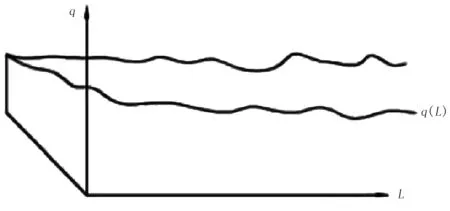
图2 路面不平度Fig.2 Road surface roughness
在甘蔗收获机整机设计阶段,利用传感器测量得到的蔗地路面不平度信号,直接导入动力学软件中(ADAMS),作为虚拟样机路面激励信号,对整机及各主要部件进行相应的动力学仿真,开展收获机的动态性能及疲劳性试验。同时,借助数学工具(MatLab)分析采集到的信号特征,将信号应用到路面激励模拟器上,在实验室直接观察测量,分析甘蔗收获机在典型的蔗地路况上的工作性能和振动情况。
1.2 蔗地路面激励时域信号的采集
1.2.1 试验采集地点
采集地点:南宁市近郊金光农场的蔗地的路面。
1.2.2 设备
本次试验利用加速度传感器采集蔗地路面不平度加速度信号。系统由电源(24V电瓶)、调理电路、数据采集卡、五轮仪及加速度传感器及笔记本电脑组成。用于采集蔗地路面加速度信号的加速度传感器安装在五轮仪中轴上,由传感器采集到的信号通过调理电路滤波整形,再通过数据采集系统数据转换后,通过笔记本电脑可实时显示并保存信号。
1.2.3 试验方案
蔗地路谱采集试验采用五轮仪法,安装图如图3所示,原理图如图4所示。为保证试验数据能够较好地反映金光农场蔗地的不平度特征,试验选取的蔗地分为平地和坡地两种,选取的蔗地刚完成了人工收割甘蔗,且蔗地表面没有蔗叶覆盖及很明显的脚印;试验时五轮仪由皮卡车牵引。

图3 五轮仪安装图Fig.3 Fifth wheel device installation drawing
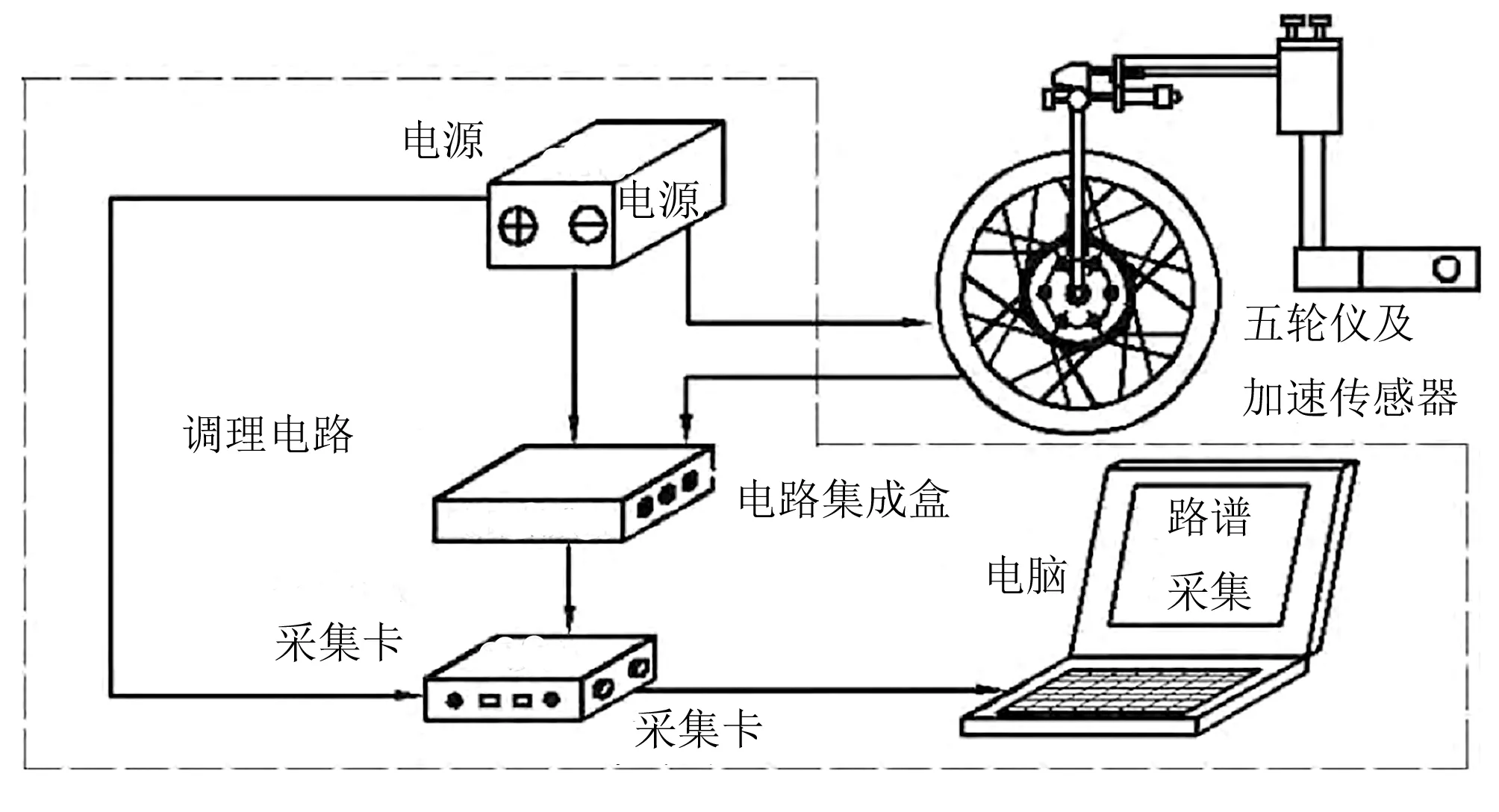
图4 五轮仪原理示意图Fig 4 Fifth wheel device principle diagram
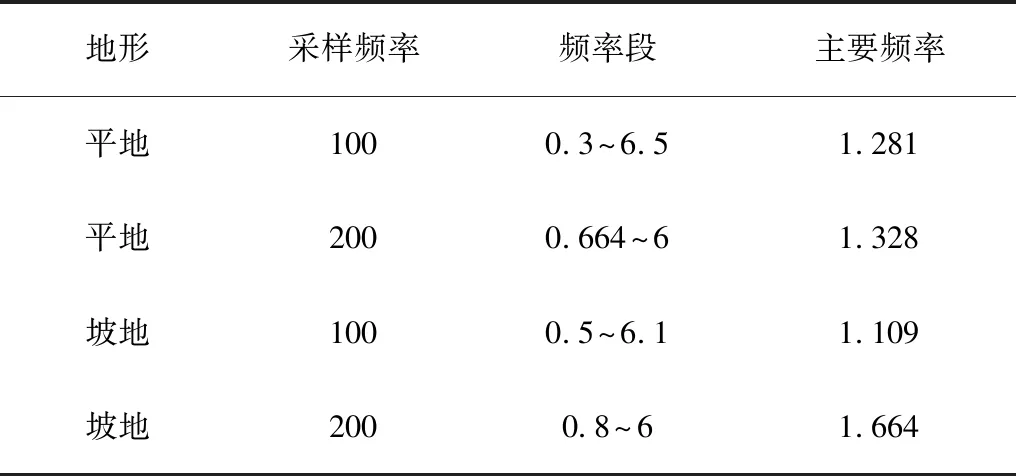
试验选择平地和坡地两种蔗地,采样频率分别设定为100、200Hz,采样时间均为60s,每次采样试验重复5次。表1所示为数据采集安排表。
表1 数据采集安排表Table 1 Arrangement of data collection
1.2.4 试验结果
蔗地路谱激励位移信号如图5所示。蔗地路谱频谱图如图6所示。
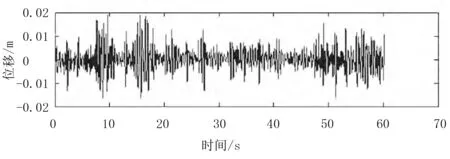
图5 蔗地路谱激励位移信号Fig.5 Road excitation displacement signals of sugarcane field
利用MatLab将加速度传感器测量的路面不平度加速度时域信号处理成位移时域信号,并进行快速傅里叶变化。图7所示为采样频率为100Hz时平地路面不平度信号的处理结果。
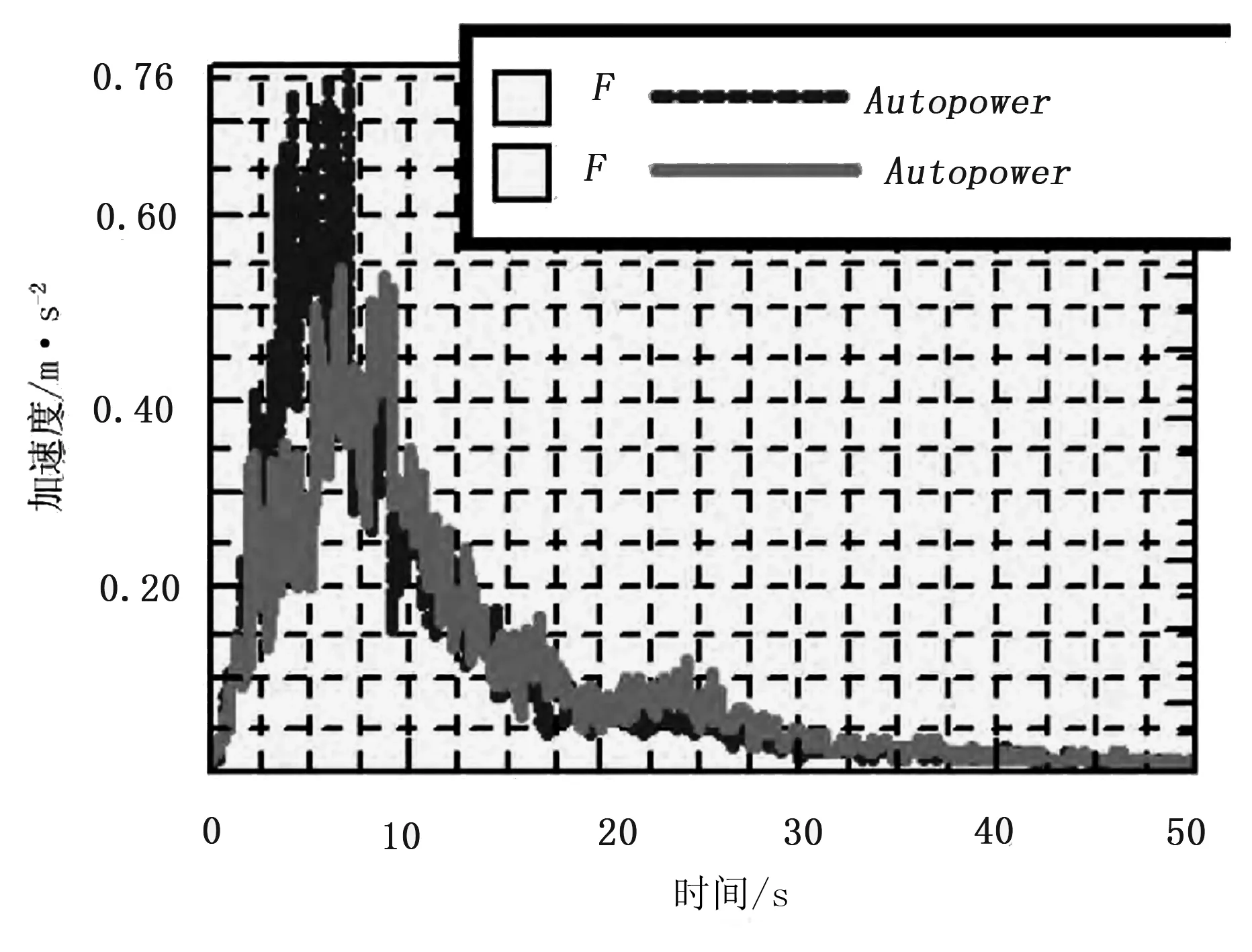
图6 蔗地路谱频谱图Fig.6 Road excitation spectrum of sugarcane field
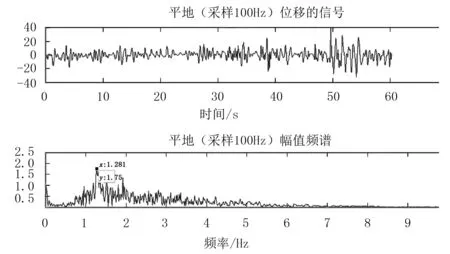
图7 平地100Hz路面不平度信号Fig.7 Flat road roughness signal at 100Hz
通过图6分析结果可知:振动的能量主要分布在0.3~6.5Hz频带上。统计5次试验结果取平均值,分析如表2所示。
表2 平地100Hz路面不平度信号Table 2 Flat road roughness signal at 100Hz Hz
图8为采样频率200Hz时平地路面不平度信号。其采样频率分别为100、200Hz时坡地路面不平度信号的处理结果,如图9和图10所示。
表3为采样频率100、200Hz时平地路面不平度信号、采样频率分别为100、200Hz时,坡地路面不平度信号5次采集数据的处理结果平均值。
由表3得知:蔗地路面不平度激振能量主要集中在1~6Hz,属于低频振动信号。利用梯形法求积分,将曲线与频率轴围成的面积细分为无限个小梯型,并求出各个频段的能量在总的能量中所占的比例,为后续的砍蔗过程研究提供理论依据。
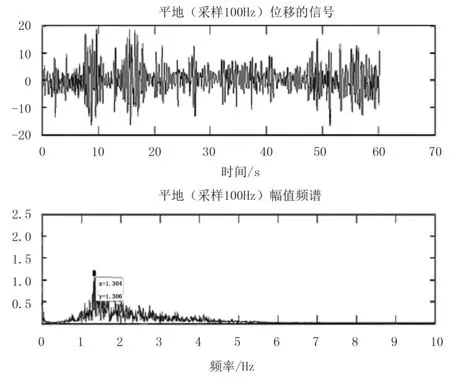
图8 平地200Hz路面不平度信号Fig.8 Flat road roughness signal at 200Hz
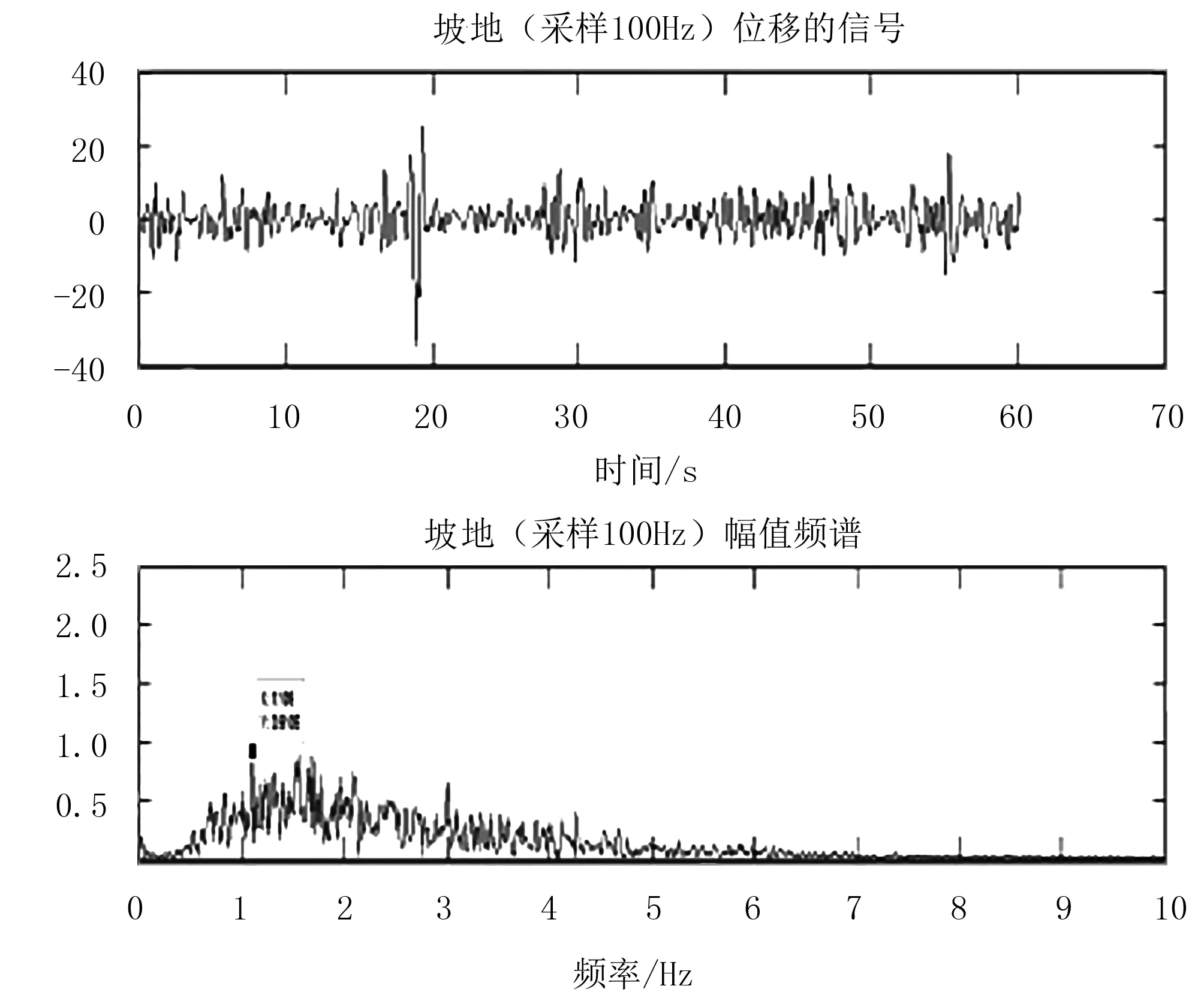
图9 坡地100Hz路面不平度信号Fig.9 Slope-lands road roughness signal at 100Hz
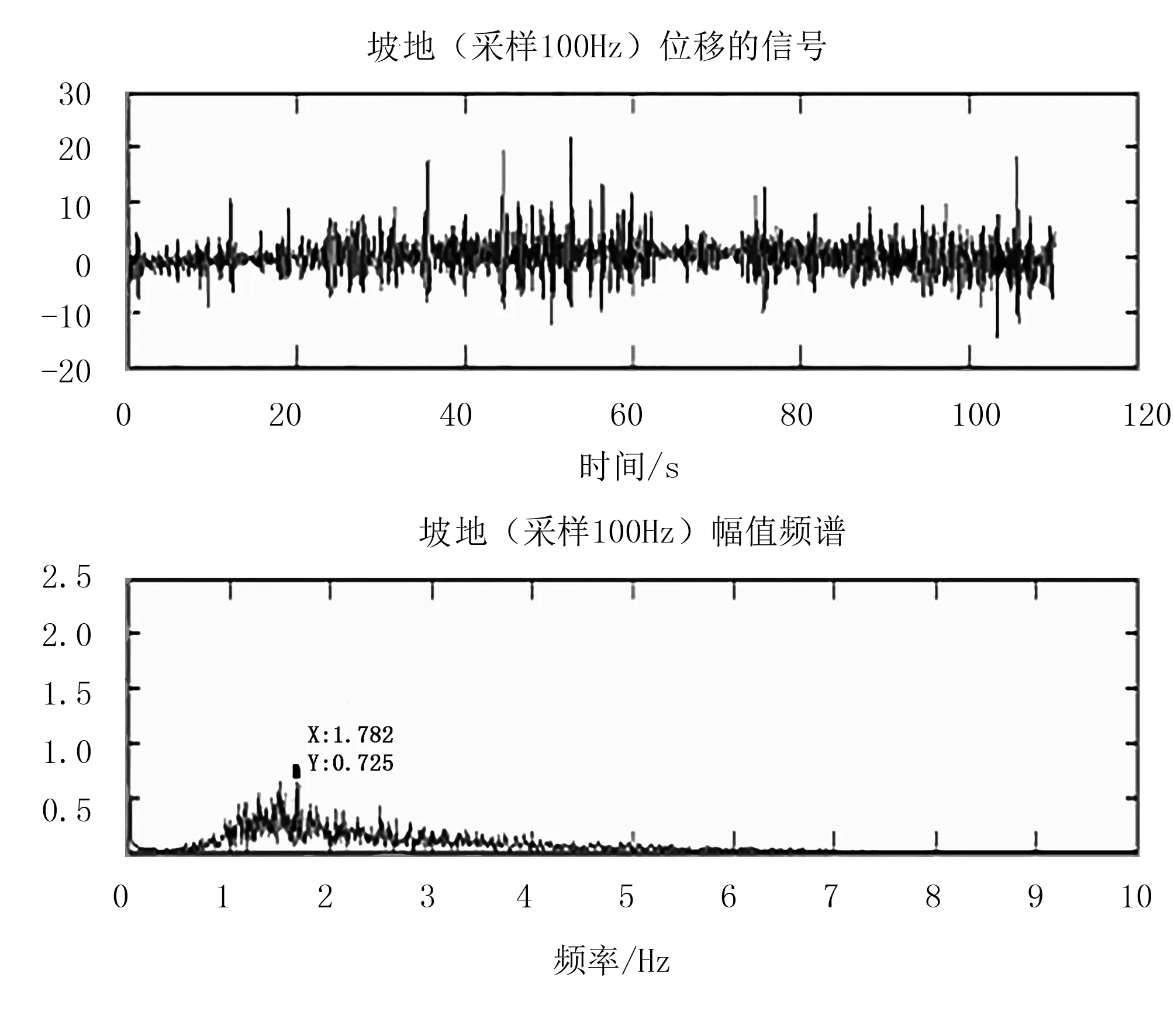
图10 坡地200Hz路面不平度信号Fig.10 Slope-lands road roughness signal at 200Hz表3 频率成分Table 3 Frequency component Hz
2 振动与宿根切割质量的关系
研究刀架刚性的意义在于降低甘蔗破头率,首先需要了解刀架动态特性与甘蔗破头率的关系。课题组前期进行了大量刀架振动位移与砍蔗质量关系的试验,如图11所示。将切割损失综合评分值曲线进行回归拟合,得到回归曲线多项式。
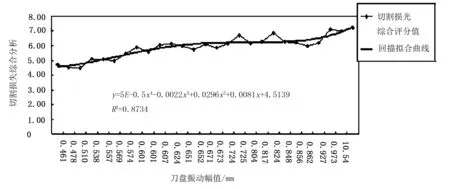
图11 刀架振动与切割损失关系Fig.11 The relationship between vibration of cutting disc and cutting damage
从图11中可以看出:刀架振幅越大,切割损失综合评分越高;振幅0.461mm对应的切割质量损失评分4.71,振幅1.054mm对应的切割质量损失评分为7.21,说明切割器振幅增加1倍,甘蔗切割质量损失提高近一半。因此,刀架振动会影响甘蔗宿根切割质量,降低收获机工作时刀架的振动剧烈程度,将会大幅度提高甘蔗宿根的切割质量。
3 刀架结构
图12为课题组实验平台的刀架结构。
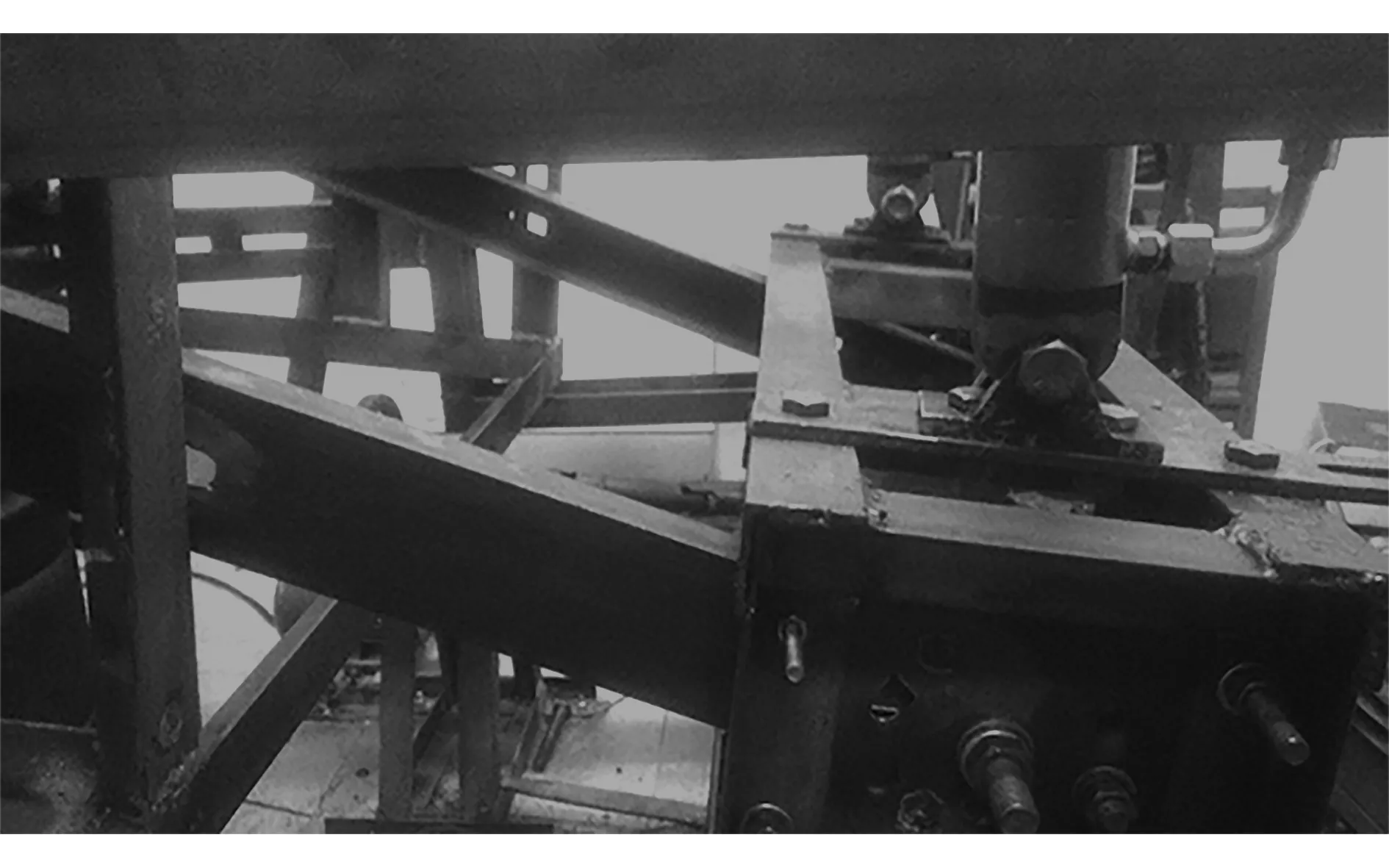
图12 甘蔗收获机切割系统Fig.12 Cutting system
齿轮箱通过提升转臂与收获机车架物流通道连接,同时发动机动力通过齿轮箱传递给刀架;刀架的升降通过安装在齿轮箱与车架上的液压缸的伸缩来实现,故此时刀架(齿轮箱和提升转臂)的刚性将直接影响到刀架工作时的振动情况。
图13为刀架的结构图。其由齿轮箱和提升转臂组成。其中,齿轮箱为刀架轴及动力传动零件的支撑架,提升转臂为齿轮箱后方伸出的两根连接杆,刀架提升时绕着提升传臂后支点转动。
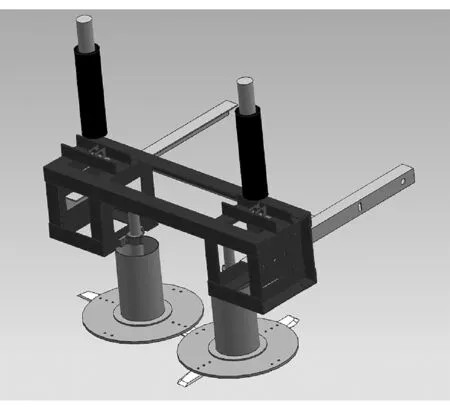
图13 刀架结构图Fig.13 Cutting system
4 模态分析
4.1 仿真模态分析
刀架有限元摸态如图14所示。表4为基于ANSYS模态分析的仿真模态结果。
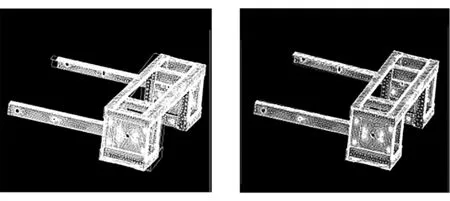
图14 刀架第1到2阶振型图Fig.14 The first 4 order modal shapes of the cutter support structure表4 刀架有限元模态计算结果Table 4 Finite element modal calculation results of lifting scheme
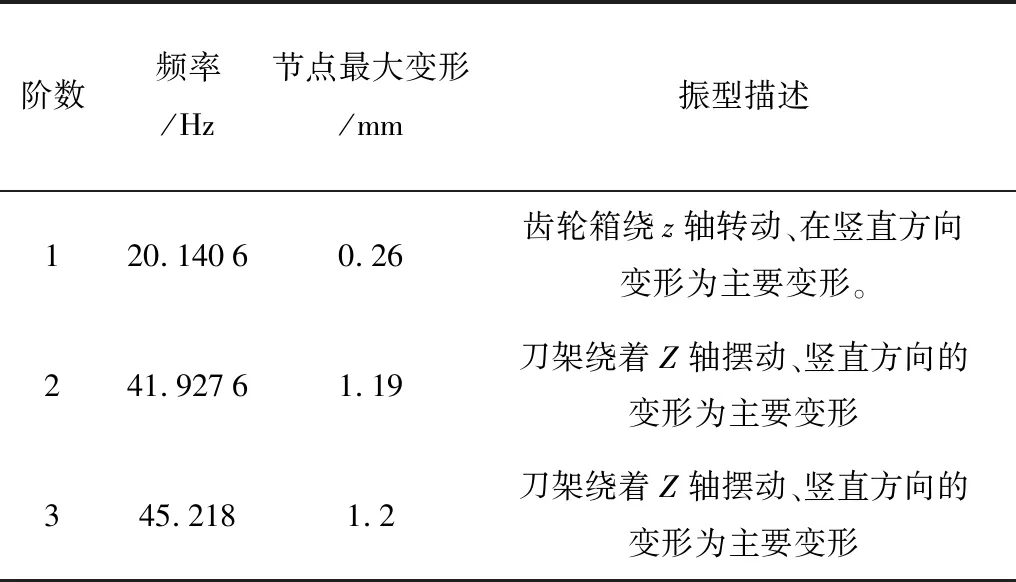
阶数频率/Hz节点最大变形/mm振型描述120.14060.26齿轮箱绕z轴转动、在竖直方向变形为主要变形。241.92761.19刀架绕着Z轴摆动、竖直方向的变形为主要变形345.2181.2刀架绕着Z轴摆动、竖直方向的变形为主要变形
通过对刀架的有限元模态分析发现:刀架前3阶模态固有频率都较低,从节点最大位移及振型图发现,刀架前3阶振型的主要形变方向都为竖直方向,且形变较大。甘蔗收获机的两根蔗刀刀轴各通过一对轴承安装在刀架上,刀架在竖直方向形变较大时,将会直接加剧刀架在竖直方向的振动,进一步影响甘蔗宿根切割质量。
4.2 试验模态分析
4.2.1 试验目的
利用振动测试系统对刀架进行试验模态分析,了解刀架的动态特性参数,为刀架结构改进做好准备。
4.2.2 试验设备
刀架试验模态测试采用单点激励法[7-8]。整套模态测试系统由激励系统、数据采集系统和模态参数识别系统3部分组成。激励系统由力锤(PCB:086D05)组成,数据采集系统为LMS_24通道数据采集系统,模态参数识别系统指TestLab测试系统内的模态分析软件。试验设备包括笔记本电脑、龙门吊及柔性绳等。测试系统框图和试验场景图分别如图15、图16所示。
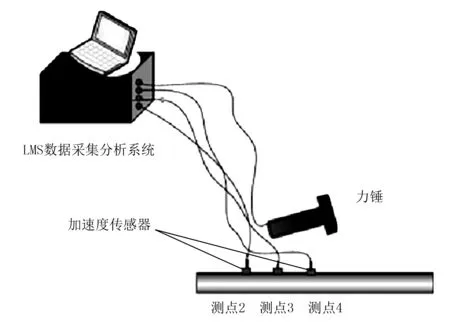
图15 测试系统框图Fig15 Test system block diagram

图16 试验场景Fig.16 The experiment scene
4.2.3 试验方案
测点布置:测点布置的原则是尽量在刀架变形比较大(刚性较弱)的地方多布置测点,响应点和激励点要避开节线处,否则会造成模态丢失。如图17所示:测试整个台架的试验模态,一共布置22个响应点。
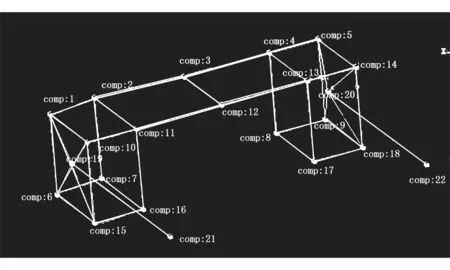
图17 测点布置Fig.17 Arrangement of measuring points
4.2.4 试验结果分析
测试过程中,敲击点为刀架左前上方点Z和X方向,观察测试振型图,刀架第1~3阶振型测试结果如图18所示。
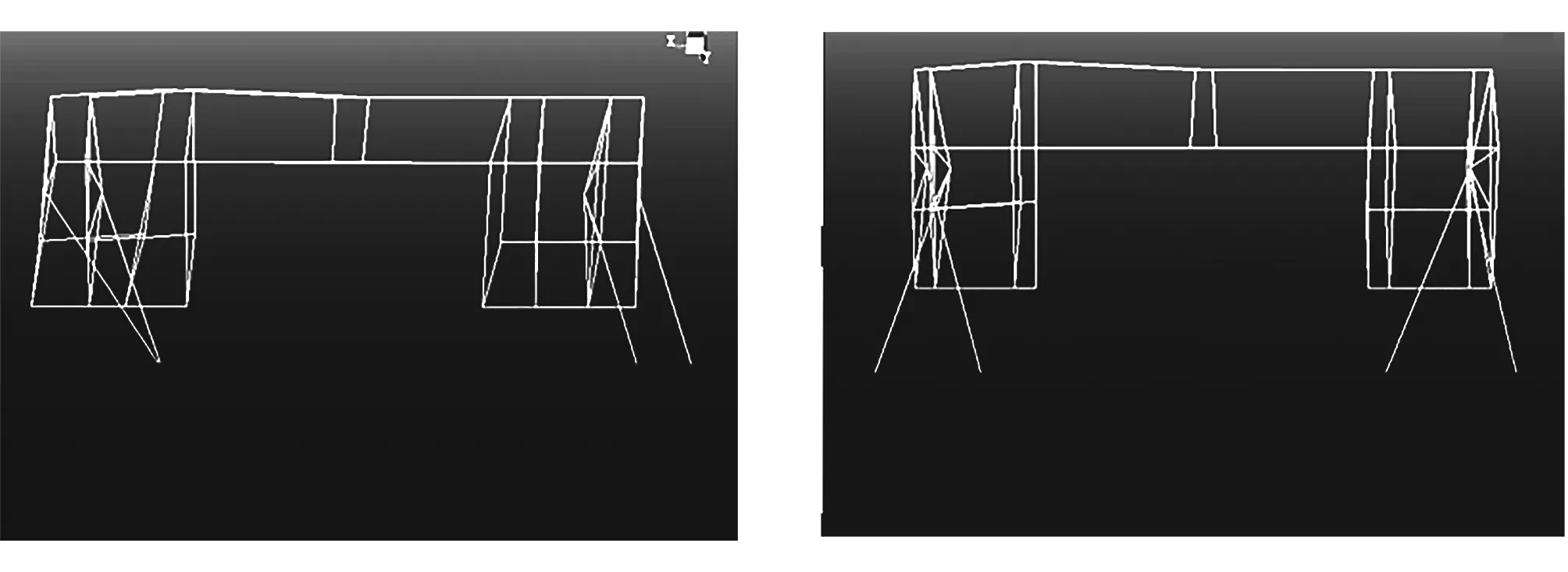
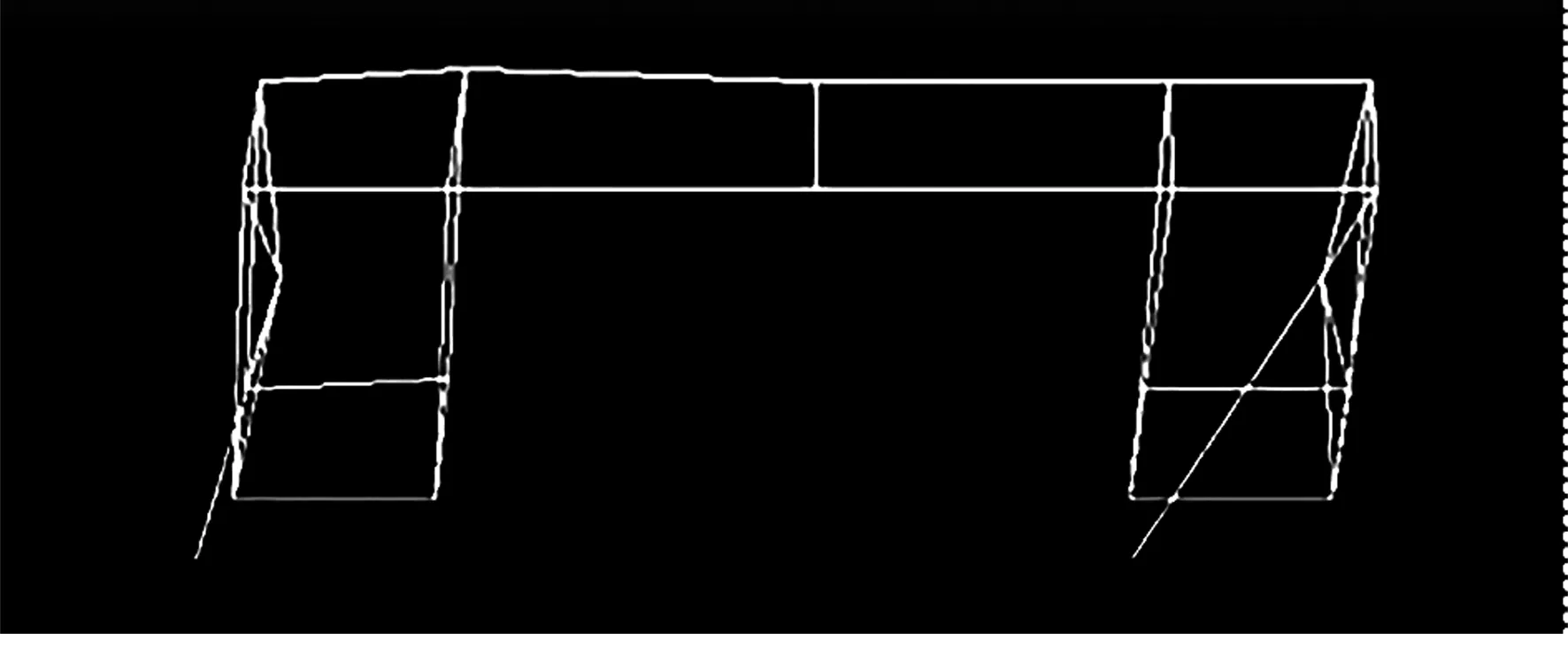
图18 刀架结构前3阶模态Fig.18 The preceding three vibration models of cutter suport structure
刀架试验模态结果,如表5所示。
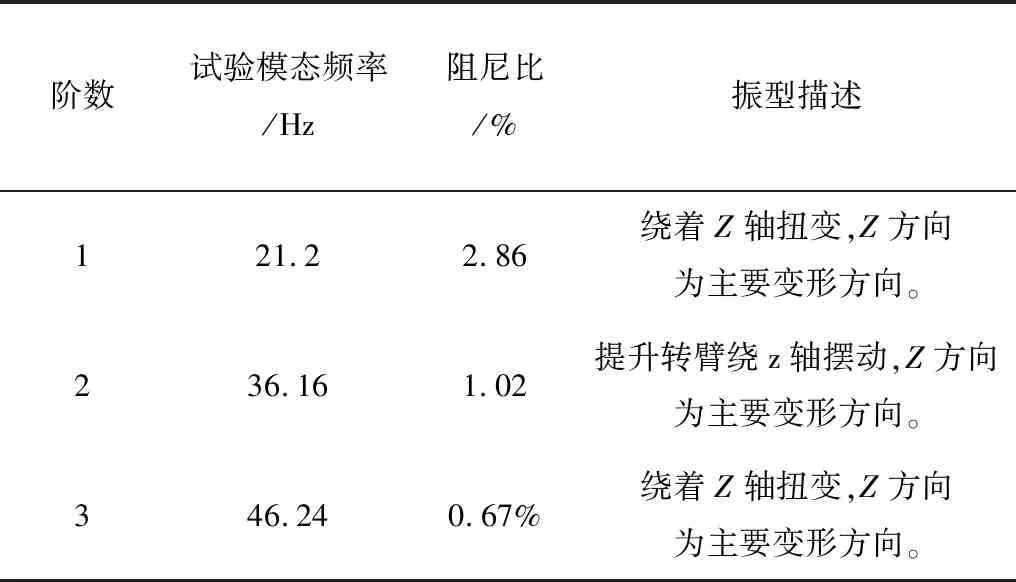
表5 试验模态结果Table 5 Experimental modal results
5 齿轮箱结构的改进
5.1 现有齿轮箱结构
刀架由齿轮箱和提升转臂两个部件组成。通过试验模态振型图及有限元模态可知:连接齿轮箱左右箱体的连杆长度大,刚度小,变形大。
现有齿轮箱结构如图19所示。
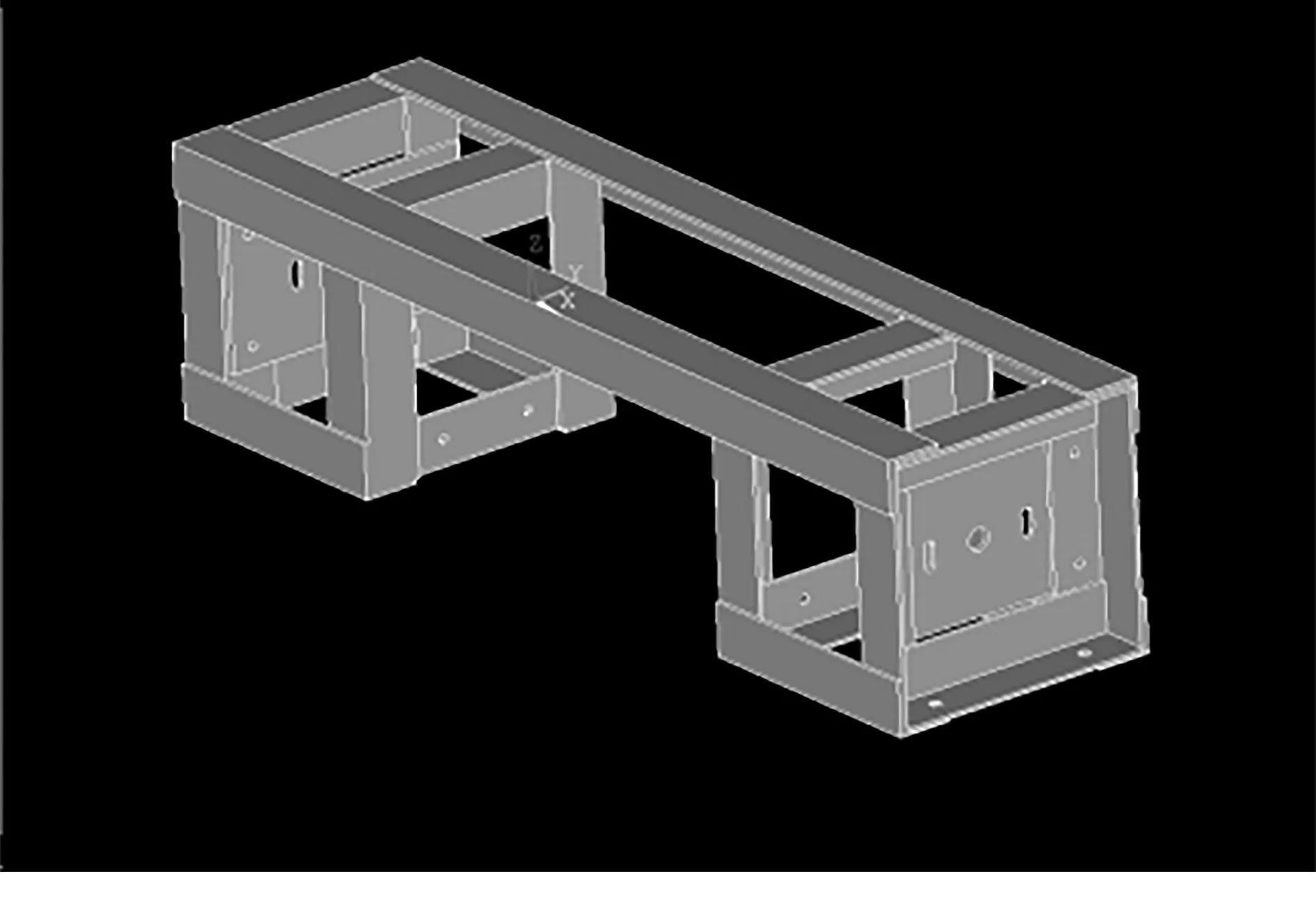
图19 改进前齿轮箱结构图Fig.19 The structure of gear box before improvement
基于Ansys模态分析结果如图20、表6所示。
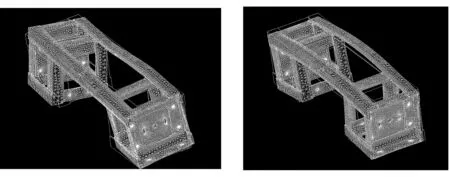
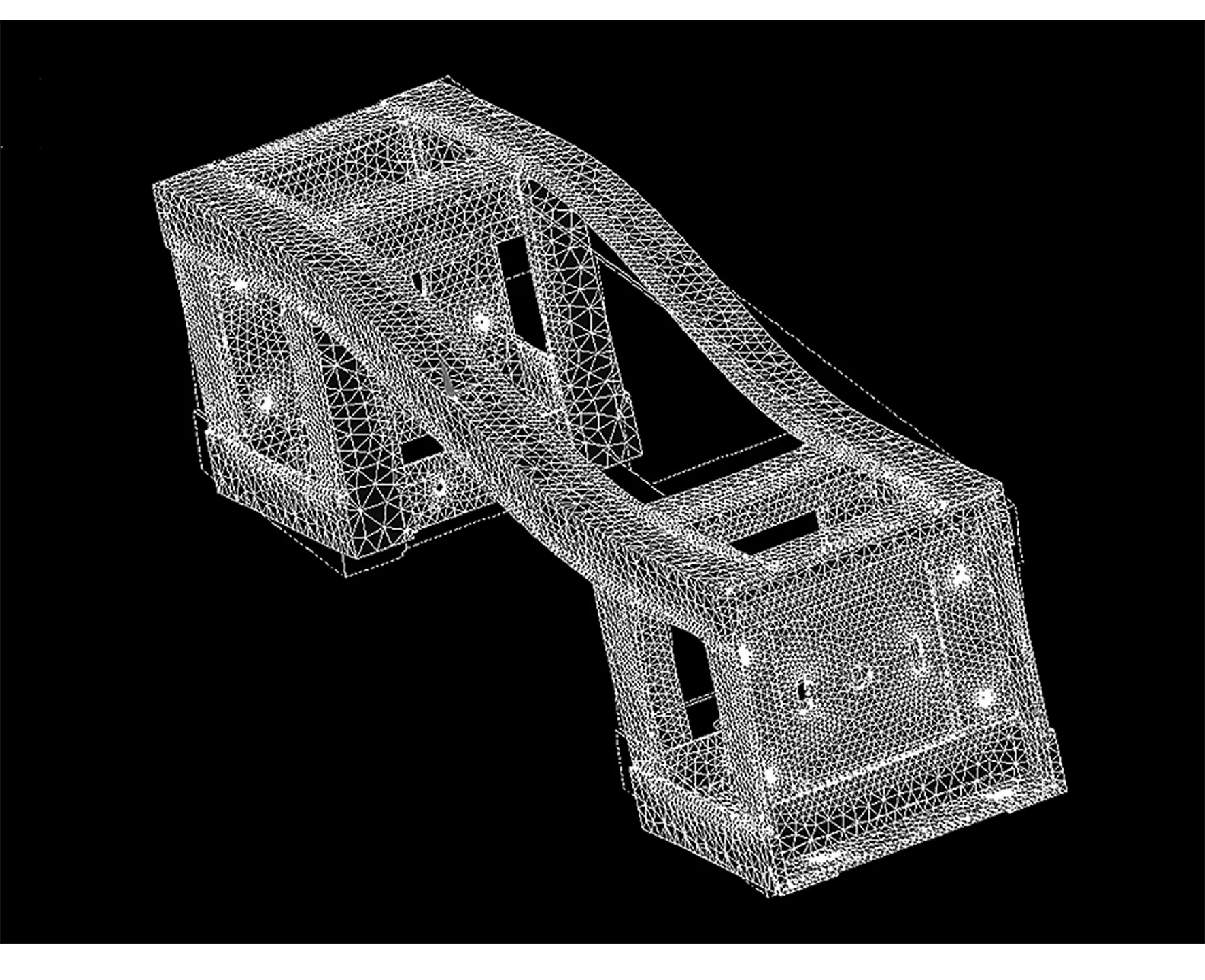
图20 齿轮箱结构的前三阶模态Fig.20 The preceding three vibration models of cutter suport structure表6 齿轮箱仿真模态分析结果Table 6 The preceding three moodal information of cutter suport structure
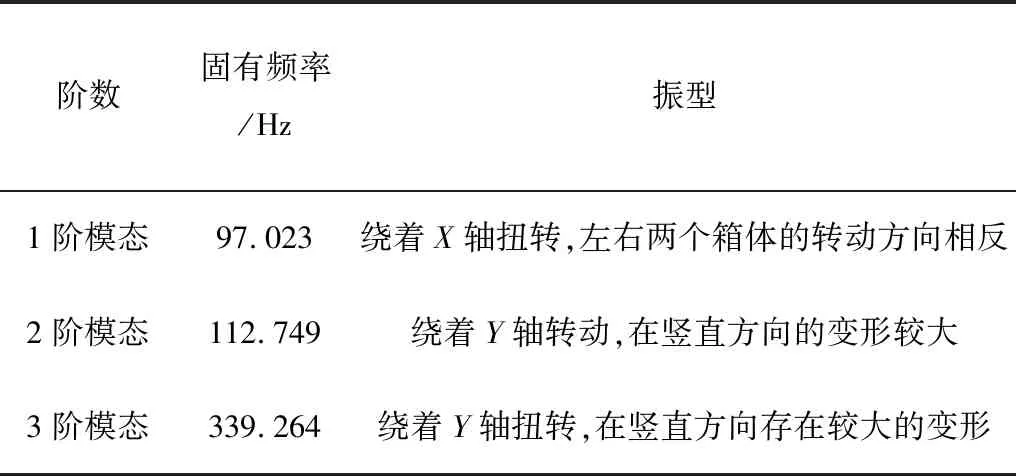
阶数固有频率/Hz振型1阶模态97.023绕着X轴扭转,左右两个箱体的转动方向相反2阶模态112.749绕着Y轴转动,在竖直方向的变形较大3阶模态339.264绕着Y轴扭转,在竖直方向存在较大的变形
5.2 齿轮箱改进方案
模态分析发现,连接齿轮箱左右箱体的中间连杆刚性较差,结构改进时应着重加强该处连杆强度。
利用5号角钢连接左右箱体,加强齿轮箱,如图21所示。
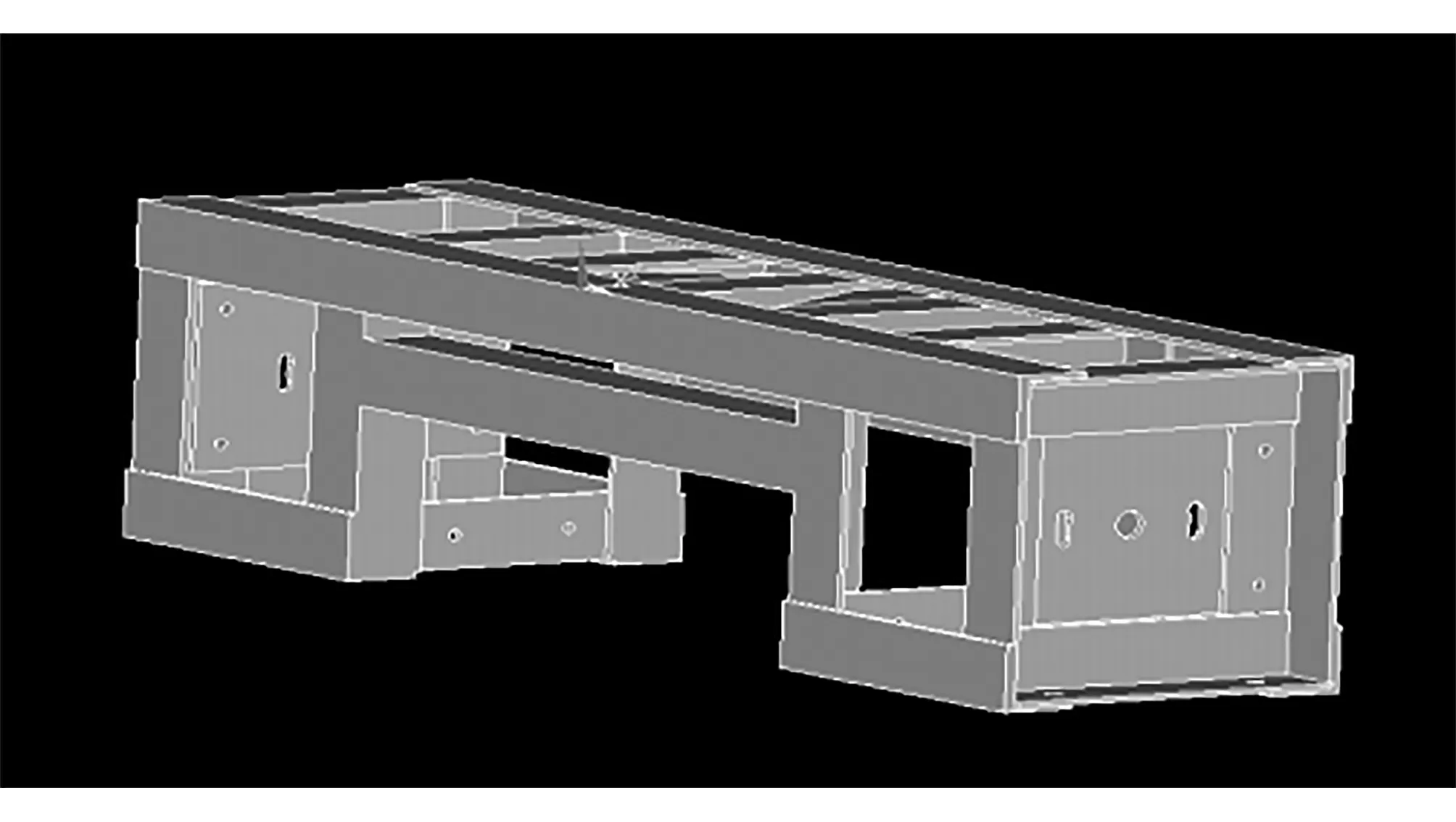
图21 结构改进后齿轮箱Fig. 21 The structure of gear box after modification
5.3 仿真结果
基于Ansys模态分析结果如图22、表7所示。
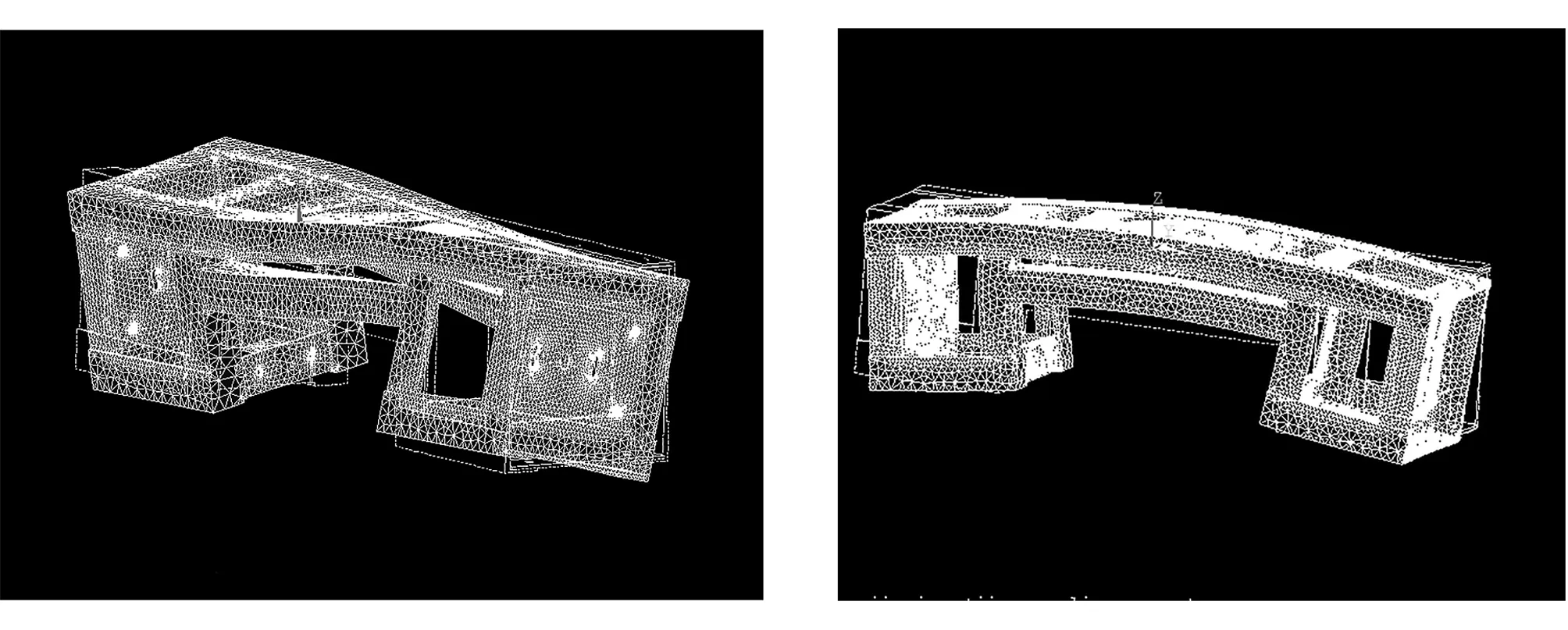
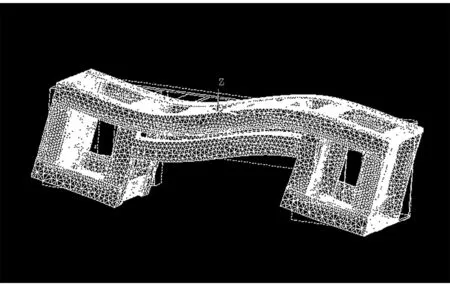
图22 齿轮箱结构改进后的前三阶模态Fig.22 The preceding three vibration models of gear box after modification表7 齿轮箱仿真模态结果Table 7 The preceding three models imformation of gear box after modification
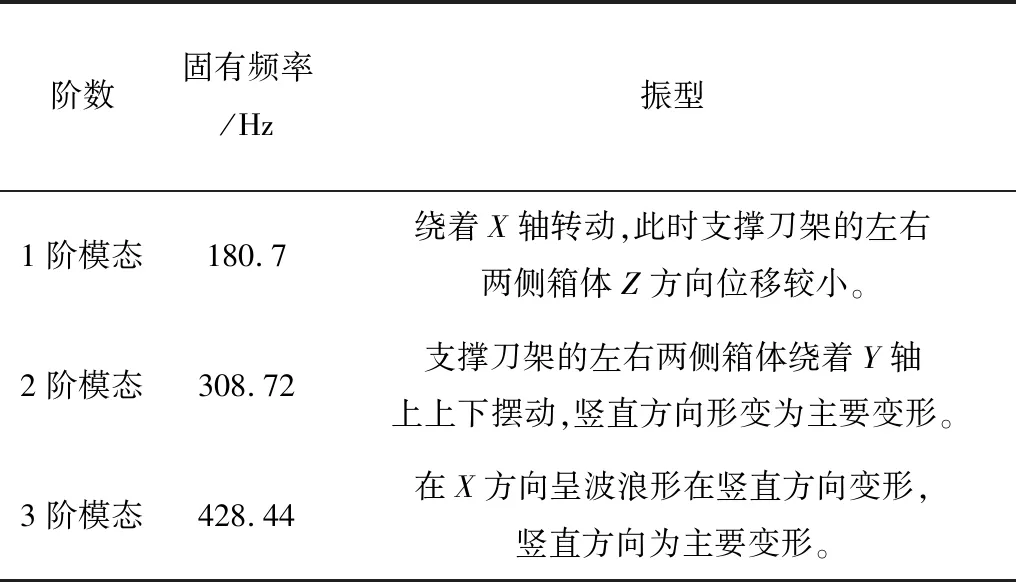
阶数固有频率/Hz振型1阶模态180.7绕着X轴转动,此时支撑刀架的左右两侧箱体Z方向位移较小。2阶模态308.72支撑刀架的左右两侧箱体绕着Y轴上上下摆动,竖直方向形变为主要变形。3阶模态428.44在X方向呈波浪形在竖直方向变形,竖直方向为主要变形。
6 刀架结构改进
6.1 现有刀架
现有刀架结构包括现有齿轮箱及提升转臂(5号角钢),如图23所示。
图23 改进前刀架结构Fig.23 The structure of the cutter support device before modification
6.2 改进方案
改进后的刀架结包括利用5号角钢加强的齿轮箱及8号槽钢替换原来的的提升转臂,改进模型如图24所示。
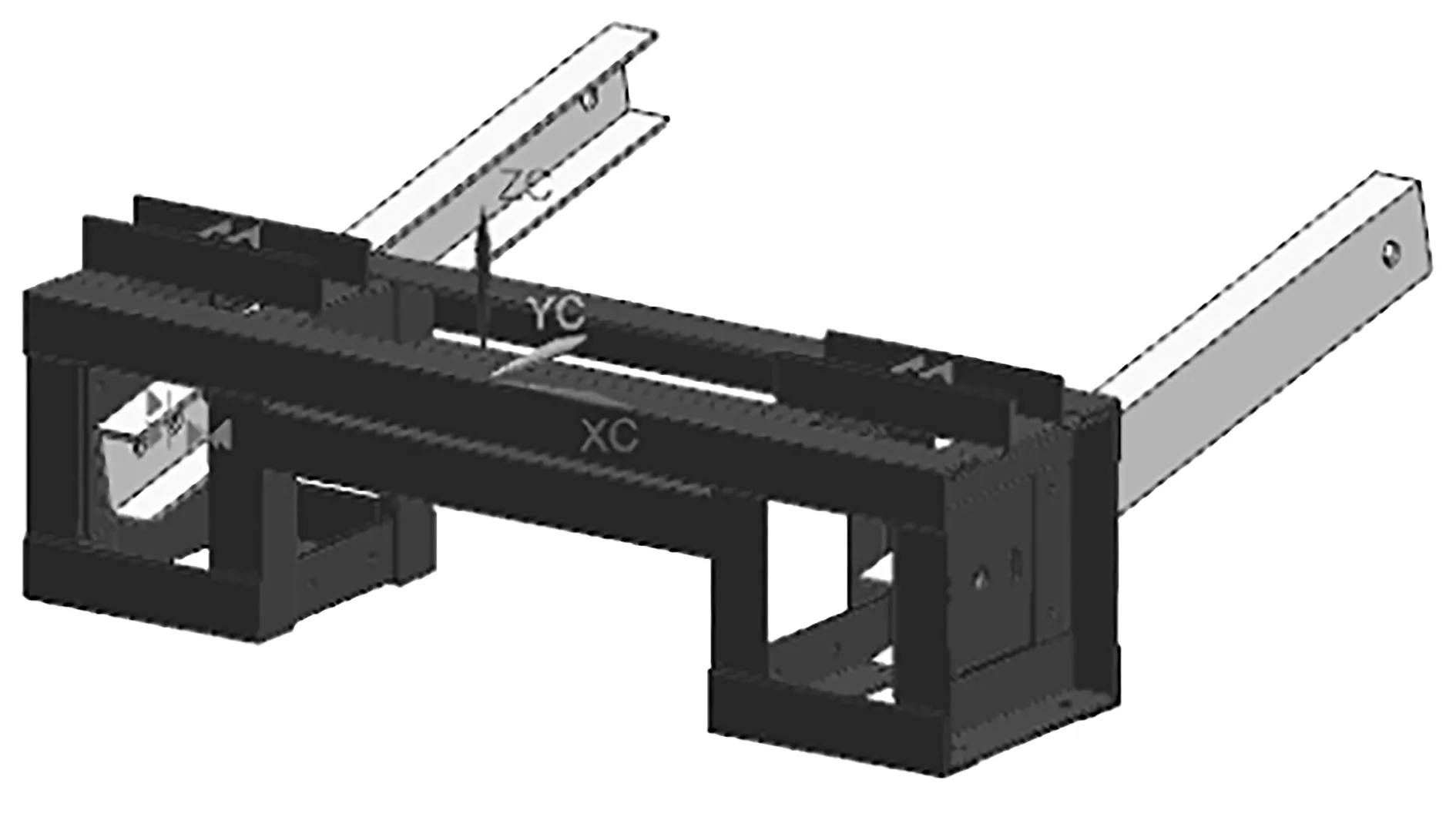
图24 刀架改进后结构Fig.24 The structure of cutter support device after modification
6.3 仿真结果
仿真结果如图25、表8所示。
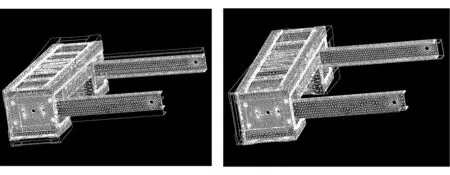
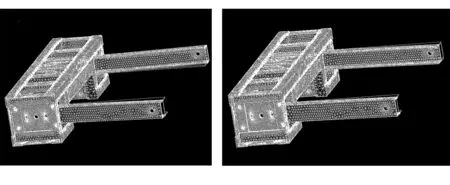
图25 刀架改进结构模态Fig.25 The map of model shape of cutter support device after modification表8 刀架改进结构模态信息Table 8 The modal imfomation of cutter support device after modification
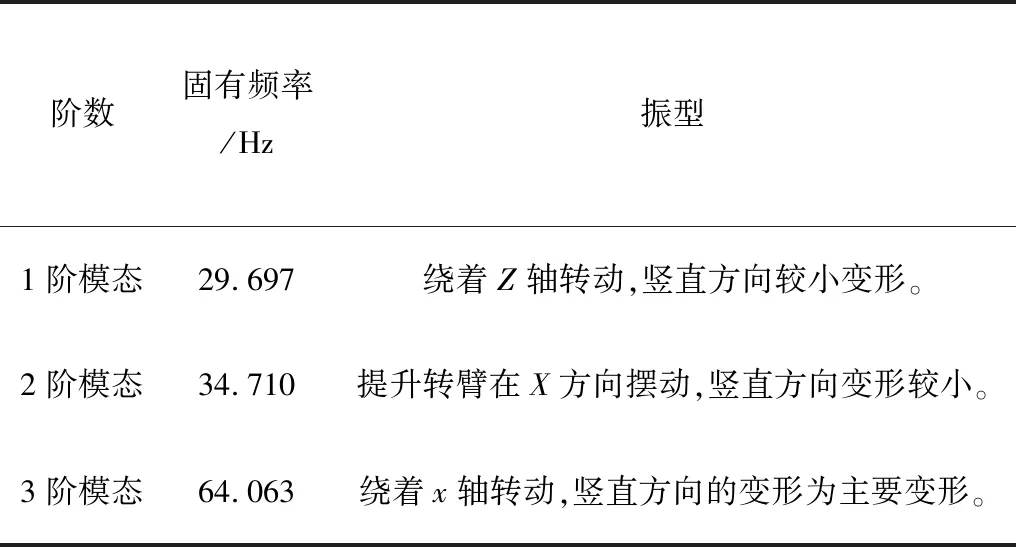
阶数固有频率/Hz振型1阶模态29.697绕着Z轴转动,竖直方向较小变形。2阶模态34.710提升转臂在X方向摆动,竖直方向变形较小。3阶模态64.063绕着x轴转动,竖直方向的变形为主要变形。
表9为改进结构与现有试验台架结构模态信息对比。
改进后各阶模态固频率最高,故采用此种结构可提高刀架刚性,可相应提升刀架的刚性。

表9 刀架结构改进前后模态固频对比Table 9 The comparison of the modal imformation of the structure before and after modification Hz
7 结论
1)路面不平度激励属于低频激励信号,能量主要集中的频段为1~6Hz,进一步分析发现1~3Hz频段的能量占据了路面激励的80%以上。
2)利用高速摄像仪对砍蔗过程进行拍摄,发现刀架在竖直方向的振动情况将会直接影响到甘蔗宿根的切割质量。
3)刀架有限元和试验模态分析表明:刀架前3阶主频均在50Hz以内,低频振动信号对刀架的影响较大,有限元分析结果和模态试验结果吻合。刀架模态振型图显示,连接齿轮箱、左右箱体的连杆及提升转臂刚性较差,竖直方向形变较大,导致刀架在竖直方向振动变大。
4)齿轮箱左右箱体连接部分利用5号角钢加强,提升转臂改为用8号槽钢。有限元软件分析结果表明:结构改进后的刀架前三阶模态由25.789、34.336、39.95Hz变为29.697、34.710、64.063Hz;结构改进后,刀架刚性明显被加强,竖直方向振动有所减缓,从而提高宿根切割质量。
