种薯排种器托种勺缺种的多点激光检测方法
2019-05-27杨振宇刘发英朱光明李学强王相友
杨振宇,刘发英,朱光明,李学强,王相友
(1.山东理工大学 a.机械工程学院;b.电气与电子工程学院;c.农业工程与食品科学学院,山东 淄博 255049;2.山东希成农业机械科技有限公司,山东 乐陵 253699)
0 引言
中国是马铃薯生产第一大国,与水稻、玉米和小麦并称为我国四大主粮作物,在保证国家粮食安全和农户创收中起到了重要作用。随着我国农业产业结构的不断调整,马铃薯的种植面积还在不断扩大。在农机购置补贴政策的拉动下,近年我国马铃薯播种机械化水平有了显著提高[1-4],但马铃薯种薯机械化播种漏播率一般只可控制在小于11%(山东希成农业机械科技有限公司2CMX-4B马铃薯种植机播种作业数据)。因种薯漏播影响马铃薯产量,国内外科研人员进行了漏播预警与检测的相关技术研究[5-12],为其他研究人员提供了启发和技术基础,但在马铃薯播种的生产实际中没有得到广泛推广,因此还需要在智能检测和自动化控制技术领域进一步探索。马铃薯播种机播种作业现场和种薯排种器外形结构,如图1所示。其作业环境具有以下特点:自然光照、有尘土、非结构化。马铃薯播种精度主要取决于排种器的排种精度,排种器的核心部件是排种带、托种勺和振动装置。减少种薯漏播的常用方法是人工调整振动装置的振幅,使种薯在托种勺上不易跌落,以此来降低种薯漏播率;但会带来另一个问题:种薯较小时容易出现重播现象,因此不能将振动装置的振幅调得过低。在马铃薯播种机播种过程中,如果能够利用多点激光检测判断托种勺上的缺种情况,采用智能控制系统控制振动装置振幅自动调节、控制补种装置自动补种,就可以进一步降低种薯的漏播率,把排种器调整到最佳工作状态。因此,托种勺缺种判别显得格外重要,是实现振动装置振幅自动调节和补种器自动补种的前提条件。

(a) 马铃薯播种机作业现场 (b) 种薯排种器1.排种带 2.托种勺 3.种薯 4.机架图1 马铃薯播种机与排种器Fig.1 Potato planter and potato seed-metering device
1 种薯排种器托种勺缺种检测原理
在自然环境下,马铃薯播种机在播种时,通过两列交错排列的托种勺依次从种箱中进行提升种薯,种薯通过排种带的顶部后翻入导薯筒,落在托种勺的背面,种薯此时所处的状态最有利于缺种检测。两列托种勺的缺种检测可以分别进行:一列托种勺的缺种检测可按如图2所示方式进行布置,在排种带托种勺的侧面分多层安装激光传感器,相邻两层激光传感器的检测高度h大于托种勺厚度的1.2倍,所有激光传感器的总检测高度为相邻托种勺间隔距离0.4倍。
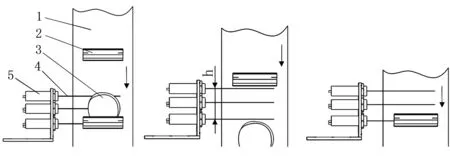
(a) 位置1 (b) 位置2 (c) 位置31.排种带 2.托种勺 3.种薯 4.激光束 5.激光传感器图2 种薯排种器托种勺缺种检测原理图Fig.2 Detection schematic diagram for seed inexistence on the seed-storage spoon of the potato seed-metering device
种薯排种器托种勺缺种的检测方法如下:
1)如图2(a)所示,当托种勺上存在种薯时,托种勺在排种带的带动下,从上往下运动,依次使得上层、中层和下层激光传感器响应;在托种勺使得下层激光传感器响应的同时,种薯使得上层或中层激光传感器响应,此时判断托种勺上有种薯,判别结果为该托种勺上不缺种。
2)如图2(b)所示,不管托种勺上是否存在种薯,当上层、中层和下层激光传感器依次响应一次后,1个托种勺位检测结束。
3)如图2(c)所示,当托种勺上不存在种薯时,托种勺在排种带的带动下,从上往下运动,同样依次使得上层、中层和下层激光传感器响应;但在托种勺使得下层激光传感器响应的同时,上层或中层激光传感器没有响应,这时判断托种勺上没有种薯,判别结果为该托种勺上缺种。
2 检测系统设计
2.1 检测装置系统设计
为了试验以上检测原理,搭建种薯排种器托种勺缺种检测试验装置,如图3所示。该试验装置由液压站、控制系统、激光传感器和排种器装置组成。排种器装置采用液压驱动的方式运行,液压站为其提供动力,在种薯排种器装置的导薯筒侧开有检测窗口;多层激光传感器安装在排种器装置的一侧,对准检测窗口中的托种勺;控制系统用来采集激光传感器的信号,对信号进行分析,对托种勺缺种进行判别,最后将判别结果输出。

1.液压站 2.控制系统 3.激光传感器 4.排种器装置 5.导薯筒 6.托种勺图3 种薯排种器托种勺缺种检测系统图Fig.3 Detection system diagram for seed inexistence on the seed-storage spoon of the potato seed-metering device
2.2 控制系统设计
种薯托种勺缺种判别控制系统主要由控制模块、上层传感器判别单元、中层传感器判别单元、下层传感器判别单元、传感器测速单元、数据通讯模块、声光报警单元、补种单元和电源与复位单元组成,如图4所示。该控制系统主要用于托种勺的缺种判别、排种装置运行方向和速度的检测和实现故障的声光报警。控制模块选用Mitsubishi FX3U-16MT/ES-A型PLC进行逻辑处理;上、中、下层判别单元选用激光传感器进行托种勺缺种检测;测速单元选用霍尔传感器进行排种装置运行方向和速度信号的采集;补种装置单元接收到控制模块的补种信号实现补种;振幅调整单元接收到控制模块的振幅调整信号实现排种带振幅的自动控制;通讯模块实现控制模块、补种装置单元和振幅调整单元之间的信号通讯;声光报警模块通过蜂鸣器和LED灯的闪烁来提示故障。
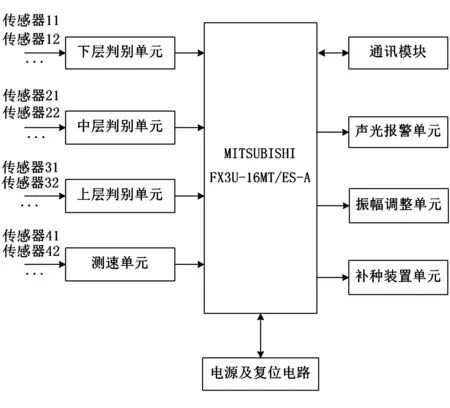
图4 控制系统硬件结构组成框图Fig.4 Hardware structure block diagram for control system
种薯排种器托种勺缺种检测控制流程,如图5所示。首先,打开检测系统的电源开关,按下启动按钮,液压站液压系统运转,排种器装置运转,控制系统自检后运转;霍尔传感器检测排种器装置的运转方向和速度;当下层激光传感器响应时,上、中层激光传感器也有部分响应判断托种勺不缺种,控制系统发出有种信号;当下层激光传感器响应时,上、中层激光传感器没有任何响应,则判断托种勺缺种,控制系统发出缺种信号,向补种器发出补种信号;下层激光传感器响应信号消失,一个托种勺的缺种判别结束,依次循环完成所有经过检测窗口的托种勺缺种情况;排种器装置托种勺缺种的判别过程中出现故障调用报警子程序,提醒使用者排除故障。
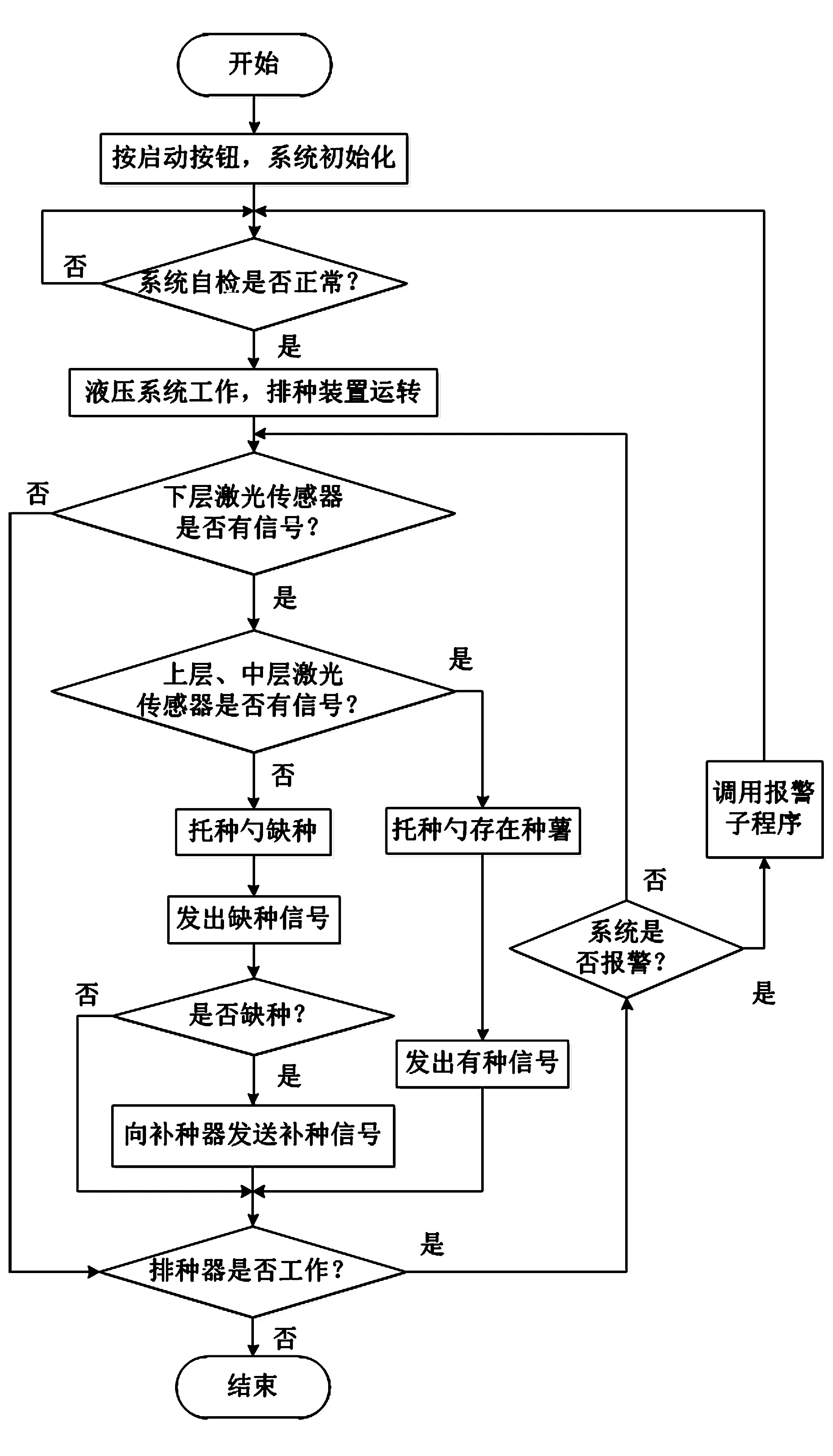
图5 种薯排种器托种勺缺种控制流程图Fig.5 Control flow chart for seed inexistence on the seed-storage spoon of the potato seed-metering device
3 正交试验设计与回归分析
3.1 试验条件
排种器托种勺缺种的多点激光检测试验于2017年12月在山东理工大学研究生工作站(山东希成农业机械科技有限公司)进行,检测的马铃薯品种为脱毒“夏波蒂”种薯,切块后平均质量在25~55g,排种带的排种速度0.6~1.2m/s,通过调整装置调整排种带的振动强度。
3.2 正交试验设计与结果分析
试验分析的指标为种薯排种器托种勺缺种判别成功率(%)。影响因素分别为:因素X为种薯排种器排种速度v,按经验值确定其水平分别为0.7、0.9、1.1m/s;因素Y为单体种薯的质量m,按马铃薯种薯制备的国家标准确定其水平分别为(30±5)g、(40±5)g、(50±5)g;因素Z为排种带振动强度k, 其水平分别为轻微振动、中等振动和较强振动。选用3因素3水平按照正交表L9(33)进行正交试验,共设计9个试验方案,种薯排种器托种勺缺种的正交试验结果和极差分析结果如表1所示。各因素极差大小顺序为:RX>RZ>RY。因此,影响收获成功率的主要因素是排种带的排种速度,其次是排种带的振动强度,最后是种薯的质量。
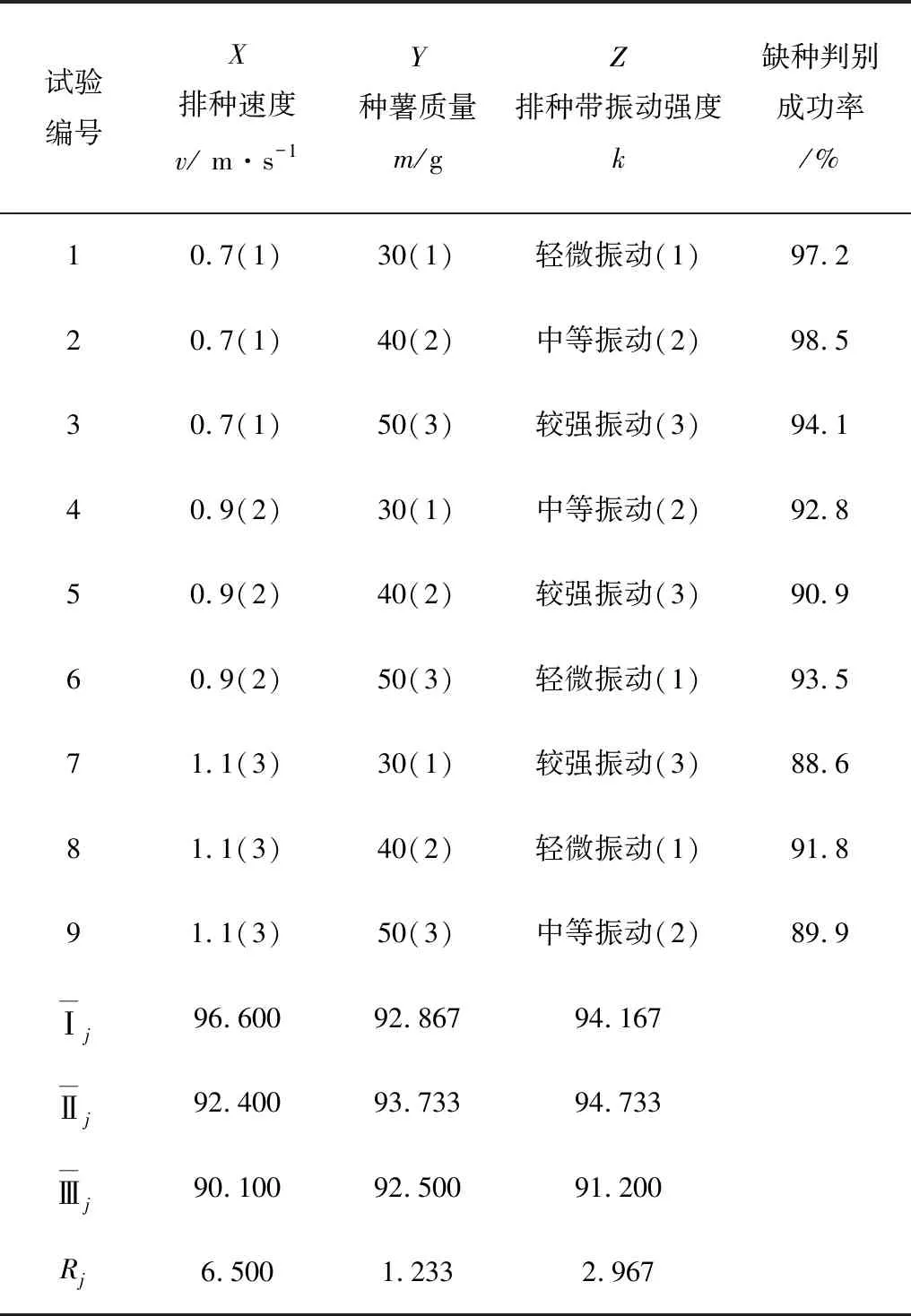
表1 正交试验结果和极差分析表Table 1 Orthogonal experimental results and simple range

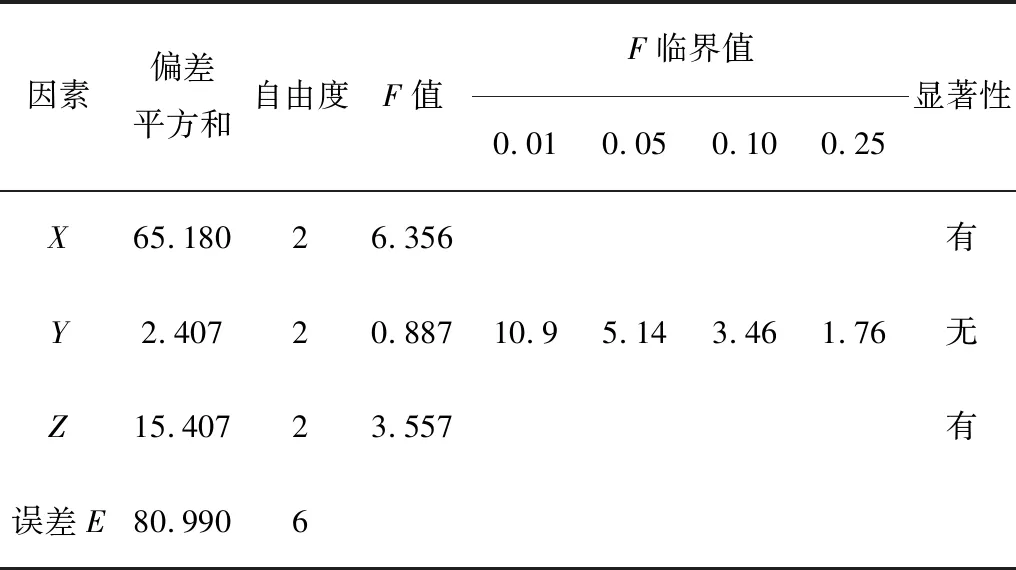
表2 正交试验方差分析表Table 2 Variance of orthogonal experiments
3.3 回归试验与结果分析
如果种薯单体过小、排种带振动强度过低,容易引起种薯重种。依据排种器托种勺缺种判别的正交试验结果,选定质量(40±5)g的种薯与排种带振动强度为中等振动强度,对排种速度v在0.7~1.3m/s内调整做单因素回归试验。试验结果、回归曲线(实线曲线)和多项式趋势曲线(虚线曲线)如图6所示。
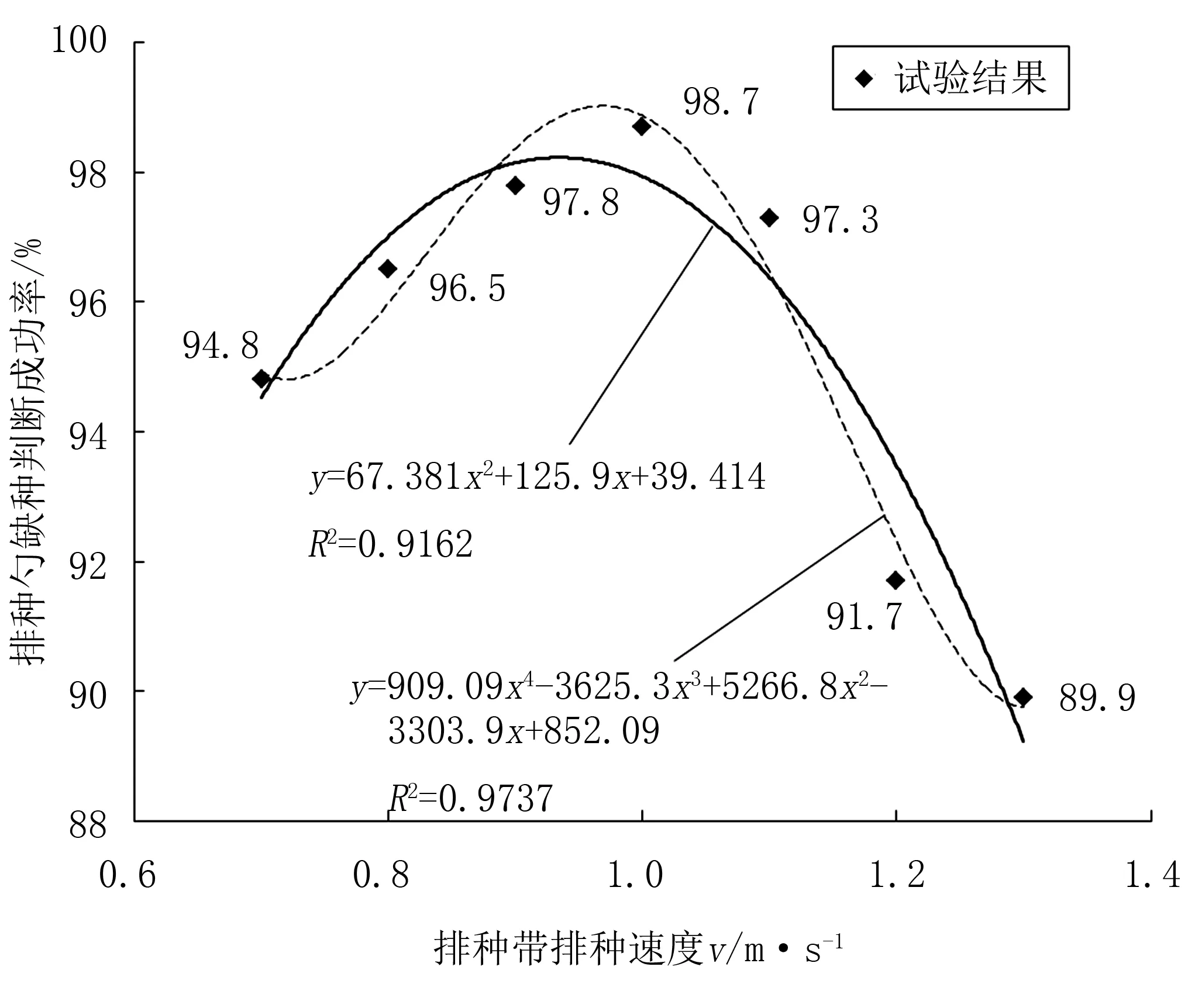
图6 排种速度对缺种判别成功率影响的分析Fig.6 Analysis of the effect of seeding speed on the success rate of missing seeds
回归曲线方程为y=-67.381x2+125.9x+39.414,多项式趋势曲线方程为y=909.09x4-3625.3x3+5266.8x2-3303.9x+852.09。回归曲线和多项式趋势曲线反映了托种勺缺种判别成功率随排种带排种速度的变化关系,当排种速度0.95m/s时,缺种判别成功率98.9%是函数指标的极大值。
根据正交试验和回归试验的结果和分析情况,选择排种速度0.95m/s、种薯质量(40±5)g,排种带中等振动强度进行试验,种薯排种器托种勺的缺种判别的平均成功率可达98.75%,且相对稳定。该组优化参数组合可作为勺链式马铃薯播种机缺种检测装置设计相关参数的参考。
4 结论
针对机械化马铃薯播种存在漏播的问题,提出了一种通过多点激光检测托种勺缺种的判别方法。根据排种带上托种勺的几何形状和排列间距,在托种勺的侧面布置多层激光传感器。当托种勺通过检测区域时,根据传感器的响应情况判断托种勺上是否缺种。为了验证缺种判别方法,搭建缺种检测试验台,通过3因素3水平的回归正交试验后,结果表明:排种带托种勺缺种的判别原理正确,性能稳定可靠;当排种速度为0.95m/s、单体种薯质量为40±5g和排种带中等振动强度时,托种勺缺种判别成功率可达98.75%。多点激光检测托种勺缺种的判别方法可为后期设计种薯补种装置实现缺种补种提供前期的技术支持。
