快速反射镜研究现状及未来发展
2019-05-24程雪岷
王 震,程雪岷
(清华大学 深圳研究生院 精密仪器系,深圳518055)
引言
作为在光源和接收器之间进行光束指向控制的反射镜器件,快速反射镜(fast steering mirror,FSM)结合了高精度角度测量技术、微位移驱动技术、先进控制理论等多种先进技术理论,相比传统框架结构大大提高了指向控制精度、控制带宽、角度分辨率。得益于其体积小巧的优点,快速反射镜易于应用在多种光机电系统中以改善系统性能[1-5]。
1 快速反射镜组成及工作原理
快速反射镜主要由反射镜、驱动元件、支撑结构、角度测量传感器、基座、驱动控制系统组成。以两轴快速反射镜为例分析,其工作原理如图1所示,支撑结构、驱动元件及角度测量传感器安装于基座上;支撑结构与反射镜连接并限制其3个平移自由度及1个旋转自由度;驱动元件可以推拉反射镜使其产生两轴的角度旋转;角度测量传感器测量反射镜的角度偏转量并反馈给控制系统;集成控制算法的驱动控制系统可根据角度测量值闭环控制驱动元件使反射镜实现可控角度偏转。

图1 FSM工作原理Fig.1 Schematic diagram of FSM
2 快速反射镜的分类
2.1 按支撑结构分类
支撑结构连接快速反射镜基座与反射镜,目前有3种结构:柔性支撑式结构、X-Y框架式结构、刚性支撑式结构,其中柔性支撑结构应用最为广泛。
柔性支撑式快速反射镜通过柔性组件实现镜体与基座的连接,一般具有限制镜体3个平移自由度及垂直镜体的旋转自由度的作用。图2为麻省理工学院的林肯实验室研制的快速反射镜[1],具有柔性轴+柔性环的柔性支撑结构。其中柔性环限制镜体2个横向平移自由度及扭转自由度,柔性轴连接镜体及基座并限制镜体的轴向位移。

图2 MIT快反镜结构示意图Fig.2 Structural schematic diagram of MIT’s FSM
另外一种柔性支撑结构[6](如图3)采用柔性铰链,按照柔性铰链的切口形状主要有直圆型、直梁型、椭圆型、倒圆角三角型。
柔性支撑结构具有角位移精度高、结构简单、无摩擦力矩、响应速度高等优点;但其结构抗干扰能力较低,尤其是工作在有振动冲击的恶劣环境,镜体可能产生微量轴向位移及角位移。因此柔性支撑快速反射镜常应用于工况良好精度要求较高的场合,如空间光通讯、天文望远镜、激光武器。

图3 两轴柔性支撑结构Fig.3 Two-axis flexure support structure
X-Y框架式结构[7](如图4)由内外2个框架组成,外框架通过轴承与基座连接,内框架通过轴承安装于外框架,反射镜固定于内框架上,内外框架轴系垂直。X-Y框架式结构旋转中心稳定、承载能力强、结构刚度高,但该结构角位移精度受限于轴承径向间隙,且存在转动摩擦、控制精度与带宽较低等缺点。

图4 X-Y框架式FSM结构图Fig.4 FSM withX-Yframe structure
刚性支撑式结构[8-9](如图5)通过刚性球面副实现反射镜与基座的连接,具有结构简单、承载能力强、抗冲击性能优秀的优点,其缺点是球面副摩擦阻力大、响应速度有限、转动精度低、加工装调难度高。

图5 刚性支撑式FSMFig.5 FSM with rigidly support structure
2.2 按驱动元件分类
目前快速反射镜的驱动元件有音圈电机驱动器及压电陶瓷驱动器两种方案。
压电陶瓷驱动器利用逆压电效应产生位移,驱动电压100 V左右,行程约100 μm,具有驱动力大、分辨率高、响应速度快等优点,但是其抗冲击性能差,行程较小需要位移放大机构,且存在迟滞蠕变等非线性因素。
音圈电机驱动器利用通电导线在磁场中受到的安培力,输出力大,且与电流成正比。音圈电机动定子间存在工作间隙,允许一定范围的反射镜偏转引起的动定子相对转动,且其位移分辨力高,理论上取决于传感器测量精度。音圈电机快速反射镜的优点是精度高、工作行程较大、驱动电压低、易于驱动控制,缺点是受磁场影响,响应频率低于压电陶瓷。
2.3 按控制器分类
快速反射镜的控制目前主要有模拟控制器及数字控制器两种方案,模拟控制器具有带宽大、分辨率高、设计简单等优点,但其受芯片性能漂移影响,难以应用调整复杂算法。随着数字芯片的发展,研究机构开始使用FPGA和DSP等控制器实现快反镜数字控制,数字控制实现复杂控制规律且控制参数易于调节的优势日益明显,并逐渐取代模拟控制。
3 国内外快速反射镜研究现状
快速反射镜的研究开始于20世纪80年代,经过多年发展,国内外研究机构研制出不同性能特点的快速反射镜。国外研究机构快速反射镜普遍采用柔性支撑结构,使用反作用质量块设计可提高音圈电机快速反射镜系统开环谐振频率至1.8 kHz,性能上其闭环带宽可达10 kHz,闭环控制精度0.1 μrad左右。国内研究机构结构设计上没有采用反作用质量块,开环谐振频率较低为100 Hz,性能上闭环带宽1 kHz左右,闭环控制精度1 μrad左右。
3.1 MIT’s HBSM
1990年,HBSM(high bandwidth steering mirror)由美国麻省理工学院林肯实验室(Lincoln laboratory)研制[1,10],图2为其结构简图。HBSM采用音圈电机驱动,磁钢固定于基座,线圈与反射镜固连降低负载质量;使用柔性轴+柔性环的柔性支撑结构,具有2个偏转自由度;结构轻量化设计,反射镜采用高刚性密度的金属铍,减小反射镜直径,增大电机推拉力臂;传感器采用电涡流差分传感器;模拟PID驱动控制。HBSM具有10 kHz的闭环控制带宽,可以对100 Hz至1 kHz的扰动进行抑制,被应用于空间光通信等对指向稳定性要求很高的光机设备。反射镜直径:16 mm;角行程:±13 mrad;闭环带宽:10 kHz; 角分辨率:0.2 μrad ;角位移精度:0.2 μrad。
3.2 MIT’s AFSM
AFSM(advanced fast steering Mirror)是2007年MIT研制的一款用于空间光通讯的两轴快反镜[11-12](如图6),其在HBSM的基础上进行了改进。AFSM由4个新型电磁驱动器、新型柔性支撑结构、反射镜、电容探针传感器及基座组成,新型电磁驱动器可提供4 000 g的加速度,电流热效应影响更小;柔性支撑结构采用弹性橡胶材料,具有频率相关的阻尼特性,控制性能更好,结构紧凑质量轻,柔性杆限制轴向平移自由度,橡胶材料限制2个横向平移自由度及扭转自由度。反射镜直径:30 mm;角行程:±3.5 mrad;闭环带宽:10 kHz;角位移精度:<0.4 μrad。
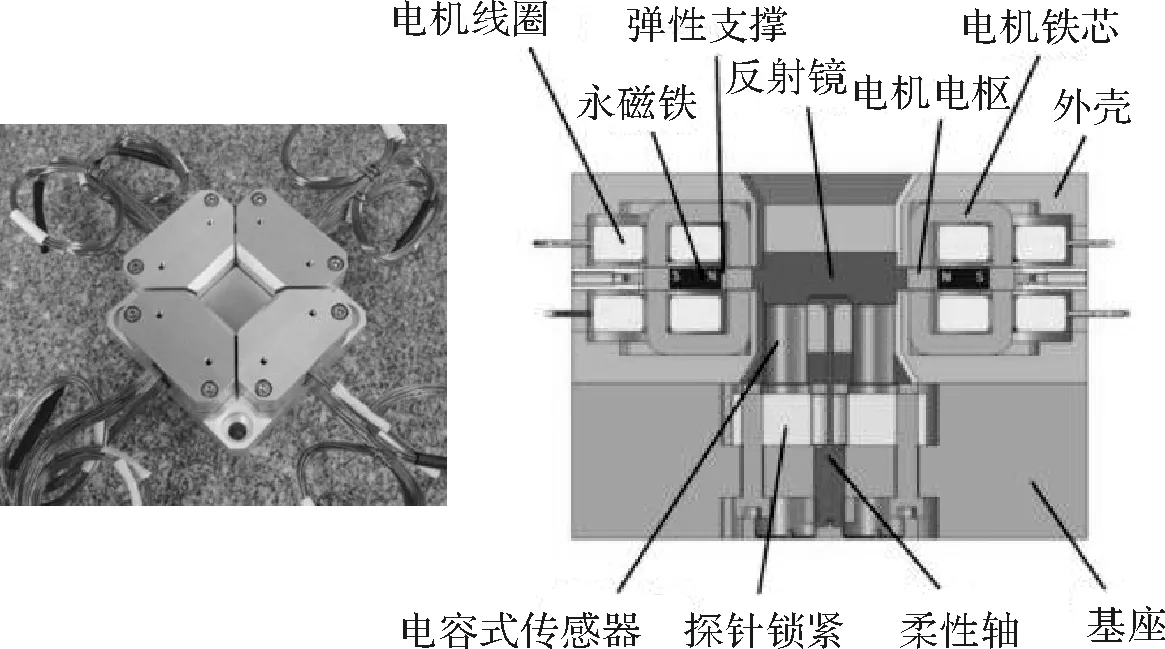
图6 AFSM结构示意图Fig.6 Structural schematic diagram of AFSM
3.3 Ball Aerospace’s two-axis FSM
图7左为1990年Ball Aerospace研制的两轴快速反射镜[13],反射镜采用金属铍,并通过结构设计降低反射镜质量;音圈电机驱动器,磁钢轻质量结构设计;反作用质量块位于反射体后与柔性轴相连降低反作用力及力矩影响,提高谐振频率。开环截止频率1.8 kHz,闭环控制带宽达到4 kHz,跟踪误差可达10 nrad。反射镜直径:25.4 mm;角行程:±50 mrad;闭环带宽:4 kHz;角分辨率:0.2 μrad;角位移精度:0.2 μrad。
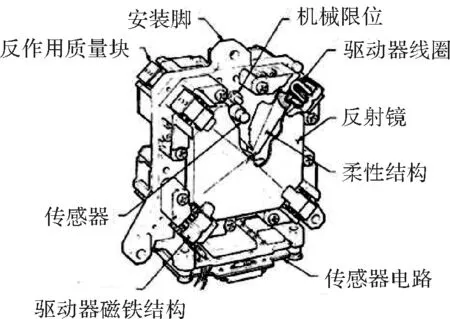

图7 Ball Aerospace两轴快反镜(左)MSFSM(右)Fig.7 Two-axis FSM(left) and MSFSM(right) of Ball Aerospace
3.4 Ball Aerospace’s MSFSM
MSFSM(magnetically-suspended fine-steering mirror)是由美国Ball Aerospace公司设计生产的一款六自由度磁悬浮快速反射镜[14-15]。如图6右,MSFSM由8个音圈电机驱动器、6个传感器、反射镜及基座组成;没有采用柔性支撑结构,具有6个运动自由度可以实现聚焦控制;127 mm大直径金属铍反射镜;驱动器磁钢与反射镜连接降低线圈热效应;电涡流差分传感器;功率损耗较高;多输入多输出控制系统,需要完成驱动器耦合矩阵及传感器耦合矩阵测量;被应用于空间望远镜。
反射镜直径:12.7 cm 角行程:±87 mrad
角偏转闭环带宽:600 Hz 角位移精度:1 μrad
对准带宽(镜平面X,Y轴):50 Hz位移分辨率:2 μm
聚焦带宽(Z轴):50Hz 位移分辨率:2 μm
3.5 ATA’s OIRU
图8为ATA(applied technology associates)公司的快速反射镜产品,口径覆盖25.4 mm~304.8 mm;控制带宽高于1 kHz;角位移分辨率可达50 nrad;采用模拟电路或数字方式(FPGA或xPC)控制;部分型号中安装有惯性传感器,图中除8个驱动器,6个角位移传感器外还有4个惯性传感器,可以实现惯性闭环。ATA的OIRU(optical inertial reference unit)[16]是可以提供极低惯性抖动的光学参考器件,可为空间光通讯(如图9)及天文望远镜等光机设备提供稳定惯性参考。OIRU产品结构组成与快速反射镜类似,一般包括4~8个驱动器、4~8个角位移传感器、4~8个惯性传感器(陀螺仪、高精度角速率传感器、加速度计)、激光光源及基座。OIRU采用FPGA执行多种信号采集、信号处理、控制算法及控制信号输出,信号采集处理频率可达20 kHz。OIRU的产品抖动性能(1~1 000 Hz):0.1 μrad;带宽:大于100 Hz;位置精度:<1 μrad。

图8 OIRU结构示意图Fig.8 Structural schematic diagram of OIRU
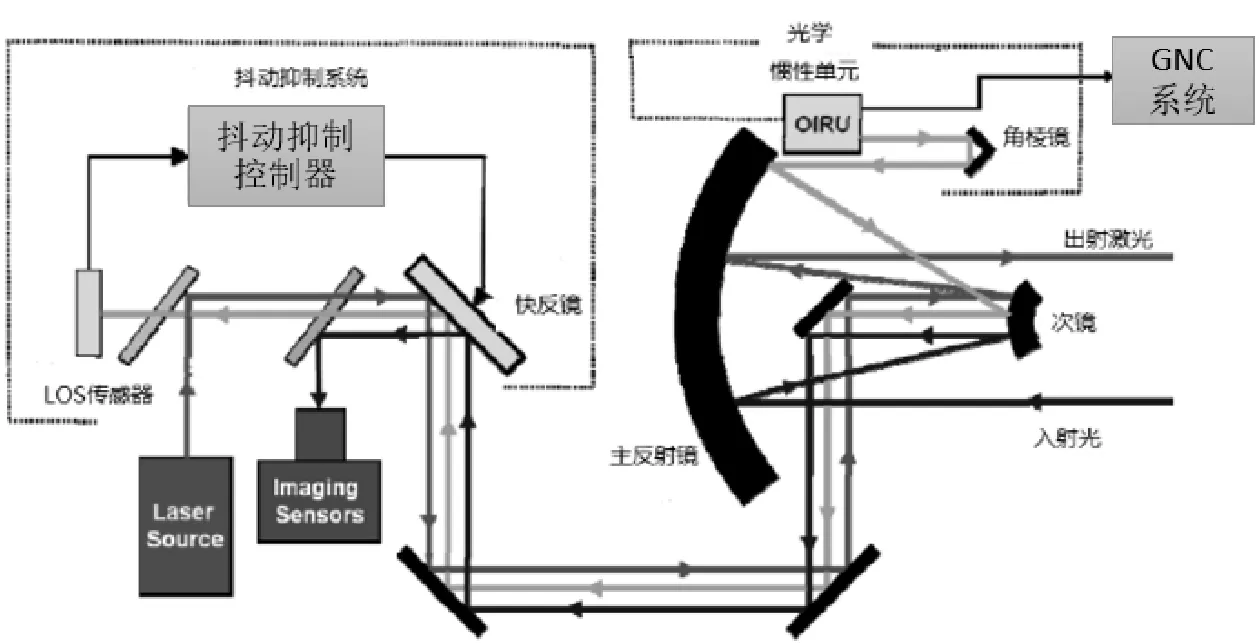
图9 OIRU应用于空间光通信Fig.9 Application of OIRU in space optical communication
3.6 Lockheed Martin’s PZT FSM
图10为洛克希德马丁空间系统公司生产的压电陶瓷驱动快速反射镜[17],应用于迈克尔逊干涉仪,要求高镜面质量、高位移分辨率、低重复误差。针对应用要求,快速反射镜采用直径50.8 mm、厚12.7 mm的金属钛材质镜片,4∶1的直径厚度比保证了很高的刚度,镜面波前误差1/900λ,1/250λ的P-V误差,表面变形少于1 nm;采用3个压电陶瓷驱动器,可提供3个平移自由度。闭环带宽1 kHz;稳态精度4 nrad。
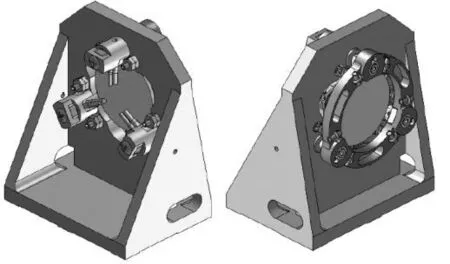
图10 洛马公司快反镜Fig.10 PZT FSM of Lockheed Martin
3.7 二维刚性支撑快反镜
图5为中科院长春光机所研制的二维高承载大口径快速反射镜[8-10],反射镜通过滚珠与基座刚性连接,提高了快速反射镜的承载能力和环境适应性;采用超硬铝合金反射镜,并进行镂空轻量化设计;采用4个光栅测微仪进行角度测量,测量精度达到1.454 4 μrad;闭环定位精度6.79 μrad。
3.8 成都光机所压电快反镜
1995年成都光机所研制出一系列压电陶瓷驱动快速反射镜[18],反射镜最初采用图11左所示的三支点连接方式,其中一个支点连接柔性支撑结构,另外两支点连接压电陶瓷驱动器,压电陶瓷作用下可以实现两轴偏转。压电陶瓷驱动器位移分辨率达到0.01 μm,角位移分辨率可达0.7 μrad,被应用于天文自适应光学系统中,追踪目标精度可达0.048 μrad。2009年成都光机所[19]对快反镜结构设计进行了优化,不仅采用了图11右所示的原点支撑,四压电陶瓷驱动器推拉驱动的方案,还引入了薄板径向支撑设计,将谐振频率从125 Hz提高至251 Hz,提高了快反镜的系统刚度、角行程。

图11 成都光机所压电陶瓷快反镜Fig.11 PZT FSM from Institute of Optics andElectronics, CAS
3.9 西安君兰电子快速反射镜
西安君兰电子研制的一系列快速反射镜(图12)采用音圈电机驱动,反射镜口径25 mm~80 mm,角位移行程最大±1.5°,闭环带宽可达400 Hz,角位移分辨率和重复精度可达1 μrad,且具有0.03%线性度高于大部分快反镜产品。其采用FPGA实现闭环PID控制,上位机可通过RS422协议控制其通讯。

图12 西安君兰电子音圈电机快反镜Fig.12 Voice coil FSM of JUNLAN Electronics
3.10 哈尔滨芯明天压电陶瓷快速反射镜
哈尔滨芯明天公司研制出一系列压电陶瓷快速反射镜(图13),最大偏转角度25 mrad,最小角位移分辨率0.02 μrad,最大镜片直径60 mm,最大闭环谐振频率2.6 kHz。

图13 哈尔滨芯明天压电陶瓷快反镜Fig.13 PZT FSM of COREMORROW
4 结束语
快速反射镜的选型与设计需要考虑多种因素:1)驱动元件上,相比压电陶瓷驱动器,音圈电机驱动力矩,角位移行程更大,驱动电路设计更简单,环境适应性更强,但其位移精度及控制带宽较低,因此在工作环境良好相对精度要求高的场合可选用压电陶瓷驱动器;2)支撑结构上,柔性支撑具有结构简单、无间隙传动、高控制精度、高控制带宽、多种变形设计等优点,因此应该得到更多的研究与重视;3)结构设计上,反射镜轻量化结构设计、高刚度质量比材料、反作用质量块减震设计等可大大提高快反镜的控制性能;4)角位移传感器上,电涡流传感器及应变片传感器依靠其体积小巧、测量精度高、响应速度快成为主流解决方案,另外陀螺仪、重力加速度计[20-23]可扩展快反镜的应用领域;5)控制器上,数字控制器如FPGA可提供多传感器的高速并行采样与处理,可集成复杂控制算法提高快反镜的性能,且易与数字系统结合。综上所述,高闭环带宽、高控制精度和数字控制是目前国内外快速反射镜的发展趋势。
