C空间中肢体参数的测量方法
2017-01-12吴刘阳钱晋武沈林勇章亚男
吴刘阳+钱晋武+沈林勇+章亚男
摘要: 通过构建肢体运动模型,运用C空间到关节空间映射理论得到关节空间中的运动参数(角位移/肢体长度)。基于光学运动捕捉仪采集步态运动实时序列,运用最小二乘法拟合关节点计算肢体长度,然后分析点坐标误差和关节长度误差对角位移的影响。结果显示,通过最小二乘拟合法计算得到的肢体长度误差小于0.5 mm,尺寸误差在0.3%以内,点误差和肢体长度误差引起的角位移误差在1.5%以内。此方法稳定可靠且精度高。
关键词: 光学运动捕捉仪; C空间; 肢体长度; 角位移; 最小二乘
中图分类号: TH 773文献标志码: A doi: 10.3969/j.issn.1005-5630.2016.05.001
文章编号: 1005-5630(2016)05-0377-06
引 言
步态是指人体步行时的姿态和行为特征。步态分析旨在通过生物力学和运动学手段,揭示步态异常的关键环节及影响因素,从而指导康复评估和治疗,有助于临床诊断、疗效评估及机理研究等。从步态信息中提取肢体关键参数时,其精度太低会使步态上的微小差异不明显或者造成较大的偏差,无法判别步态检测系统的准确性。
在人体运动学建模过程中,肢体长度是人体建模的关键参数。最直接的测量方法是用皮尺直接测量下肢关节。计算机断层成像(CT)、三维超声和核磁共振成像(MRI)常用来测量下肢长度,CT是利用精确准直的X射线对人体某部位一定厚度的层面进行扫描,具有扫描时间快、图像清晰等特点。
X射线测量有三种影像:
1) 全长片,即一次性拍摄下肢全长直立前后位片,从髋关节至踝关节。优点是只需一次摄片,但有视差错误引起的失真。Machen等[1]认为全长片较平扫片能提供更多的信息。甘伟等[2]运用螺旋CT扫描得到双下肢全长(髋关节至踝关节)的完整图像,可进行长度测量、角度测量、图像缩放等应用。Strecker 等[3]使用CT和乌尔姆法测量成年患者的下肢长度,99%的下肢长度差异为1.4 cm。
2) 平扫片,需要三次摄片,髋、膝、踝各一次,并拼接组合而成,可有效减小放大误差,但却增加了摄片时间、放射线暴露及拼接误差。孙亚明等[4]通过对南京地区青年人站立位髋关节X射线平片的测量分析股骨大转子尖连线与股骨头中心连线的位置关系及其在人工髋关节置换手术中对双下肢长度的评估作用。
3) 计算机数字影像,数字合成技术可减少放射线暴露及数学上的误差[5],简便快捷,重复性好,能提高图像质量并进行数字处理,对下肢长度测量有很大优势。Diercks等[6]提出对平片放大并进行数字校正,术前拍摄双髋关节实际大小的前后位片,就能通过设置骨盆及股骨参照点来间接测量下肢长度,目前在临床上广泛应用[7]。李钧等[8]利用软件和原始CT 扫描图像重建关节周围骨骼三维图像,并测量下肢骨骼参数。童涵涵等[9]采用Slot技术一次完成双下肢成像,利用后处理软件进行双下肢测量。Slot 技术测量误差小,方便,可操作性强,为临床提供了一种准确测量双下肢长度的方法。Menegaldo等[10]提出了一套估计长度的回归方程。此方程找到所需的大肌肉骨骼模型数值模拟的肌腱几何参数,基于贯穿每个肌腱式传动器的广义节点坐标系的数目,生成复杂性级别不同的回归方程。田庆国等[11]提出了一种利用三维人体点云数据测量人体关键尺寸的方法,典型尺寸测量误差小于3%,可满足人类工效学等领域快速测量人体特征尺寸的要求。
超声在下肢长度测量方面一直被认为较CT稍逊一筹,但Konermann等[12]应用握持和移动超声传感器特殊设备,通过超声测量髋、膝、踝三点间距离来提示术前及术后下肢长度,可精确至1 mm。Affatato等[13]指出超声在活体测量时会有1.7%的相对误差,下肢测量时约为0.4 mm。S′witek-Najwer等[14]将开发的超声探头应用于临床中。超声的优点是可以避免放射线接触,无创、简单、快捷。
CT、三维超声的灵敏度可达 1 mm,MRI 准确性不如 CT、三维超声,且费用较高。以往对人体,特别是下肢长度的测量方法存在精度和安全性无法同时满足以及费用高等问题。精密运动捕捉仪采集数据精度高,系统功能强,受试者活动范围大,无电缆、机械装置的限制,使用方便。在基于精密运动捕捉仪的步态检测系统中,利用可重复的标志点精确设置的方法,以快捷、对受试者无负重的方式获取步态分解中的关节参数变化时间序列数据。
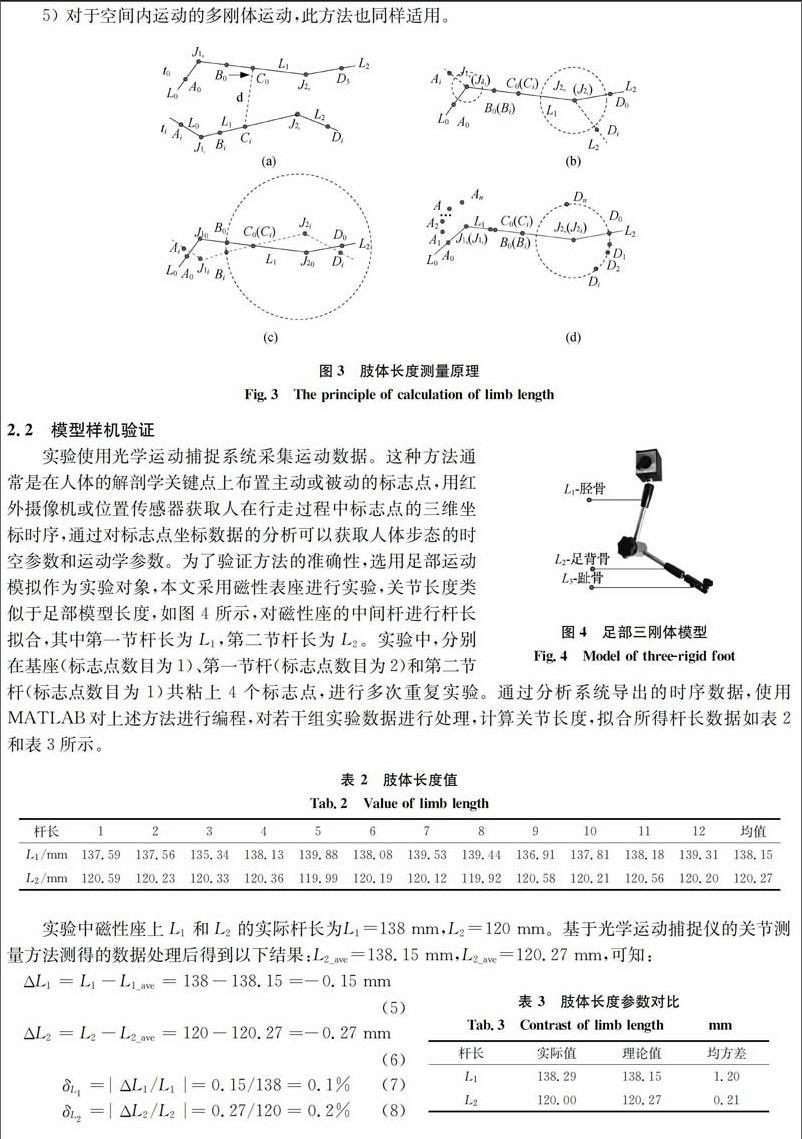
本文着重介绍基于光学运动捕捉仪获取4个标志点时序数据,再利用最小二乘法拟合关节点,从而计算关节长度的新方法,以及标志点精度和长度误差对角位移的影响。
1 建立肢体模型
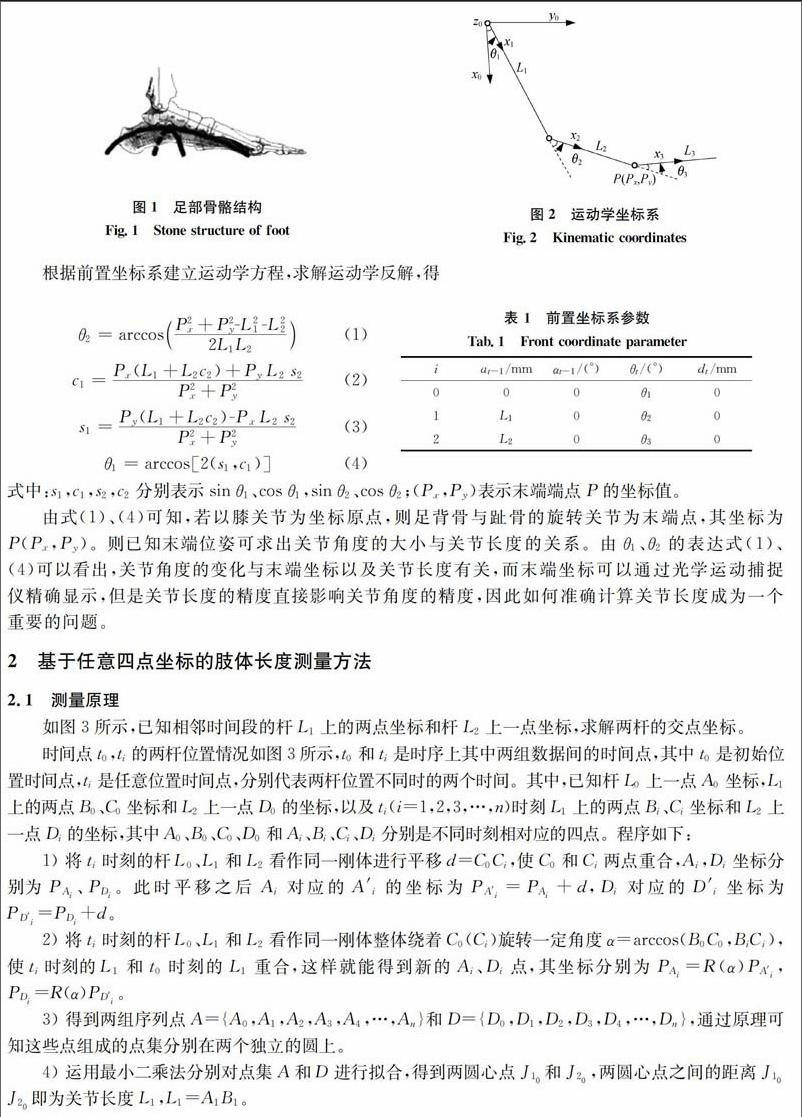
对于肢体多刚体运动,例如上肢运动、下肢运动等,多采用串联结构表示运动模式。为降低模型的复杂性,便于分析和研究,一般将足部的各环节简化为机械运动中的刚体,将人足的各关节简化为机械运动中的铰链,从而将足部简化为常见的机械运动中的刚体-铰链系统模型。然后,根据经典力学理论对简化的人足运动模型进行运动分析,同时也考虑人足的运动特性,最后得出能反映真实运动情况的特征规律。为了准确地确定足部运动与下肢运动的精确关系,本文建立三刚体运动学模型。
依据D-H(Denavit-Hartenberg)矩阵法的原理,将足部看作两个刚体,即脚面和脚趾两部分,如图1所示。足部关节示意图如图2所示,每个部分通过单一自由度(转动)链接,L1表示小腿胫骨,L2表示足背骨,L3表示趾骨,进行运动学建模,运动时D-H参数如表1所示。
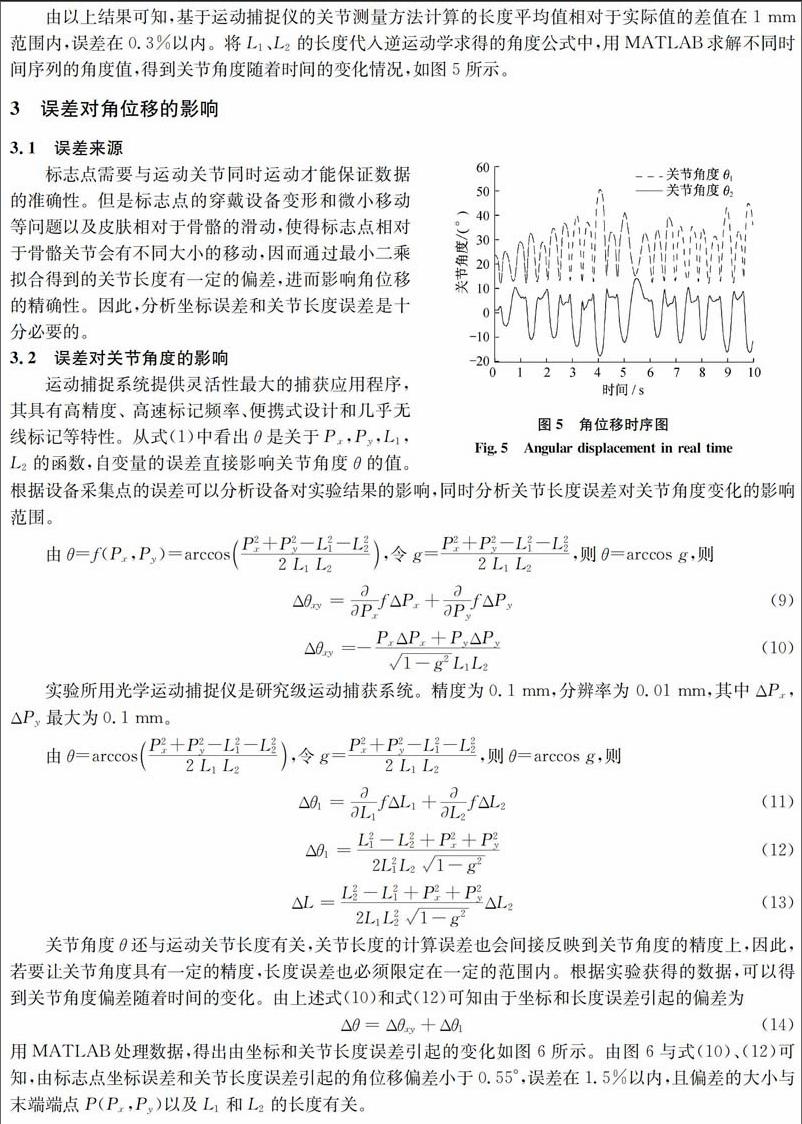
4 结 论
基于运动捕捉仪的肢体长度测量方法不但适用于简单的二维运动,还适用于空间内的三维运动,具有高精度、稳定可靠、无伤害的特点。这种肢体长度测量方法的准确性为建立准确的肢体运动学模型提供了保障,特别是在医学步态分析方面,利用光学运动捕捉仪采集数据序列的同时,可以根据数据精确计算肢体长度,不需再用其他设备测量肢体长度。由于实验条件的局限性,肢体真实有效的运动长度很难进行高精度的估算,故而无法真正在人体上进行肢体长度准确性和精度的验证。
参考文献:
[1] MACHEN M S,STEVENS P M.Should full-length standing anteroposterior radiographs replace the scanogram for measurement of limb length discrepancy[J].Journal of Pediatric Orthopedics Part B,2005,14(1):30-37.
[2] 甘 伟,马 坚.CT的Topogram像在下肢全长摄影方法中的应用研究[J].当代医学,2013,19(2):42-43.
[3] STRECKER W,KEPPLER P,GEBHARD F,et al.Length and torsion of the lower limb[J].The Journal of Bone and Joint Surgery,British Volume,1997,79(6):1019-1023.
[4] 孙亚明,史冬泉,杨献峰,等.南京地区青年人站立位股骨大转子尖连线与股骨头中心连线位置关系的影像学测量[J].中国临床医生,2014(8):62-65.
[5] BOEWER M,ARNDT H,OSTERMANN P A W,et al.Length and angle measurements of the lower extremity in digital composite overview images[J].European Radiology,2005,15(1):158-164.
[6] THE B,DIERCKS R L,STEWART R E,et al.Digital correction of magnification in pelvic X rays for preoperative planning of hip joint replacements:theoretical development and clinical results of a new protocol[J].Medical Physics,2005,32(8):2580-2589.
[7] DE THOMASSON E,MAZEL C,GUINGAND O,et al.Value of preoperative planning in total hip arthroplasty[J].Revue de Chirurgie Orthopedique et Reparatrice de Lappareil Moteur,2002,88(3):229-235.
[8] 李 钧,陈爱民,郭清河,等.国人下肢正常骨与关节周围解剖数据库的建立[J].中国骨与关节损伤杂志,2011,26(8):708-710.
[9] 童涵涵,张志田.Slot技术在双下肢全长测量中的临床应用分析[J].现代实用医学,2014,26(11):1436-1437.
[10] MENEGALDO L L,DE TOLEDO FLEURY A,WEBER H I.Moment arms and musculotendon lengths estimation for a three-dimensional lower-limb model[J].Journal of Biomechanics,2004,37(9):1447-1453.
[11] 田庆国,葛宝臻,杜朴,等.基于激光三维扫描的人体特征尺寸测量[J].光学 精密工程,2007,15(1):84-88.
[12] KONERMANN W,GRUBER G.Ultrasound determination of leg length[J].Der Orthopde,2002,31(3):300-305.
[13] AFFATATO S,TONI A.Leg length measurement:a new method to assure the correct leg length in total hip arthroplasty[J].Medical Engineering & Physics,2000,22(6):435-439.
[14] S′WIATEK-NAJWER E,KRYSZTOFORSKI K,DRAGAN S ,et al.The investigation of the lower limb geometry using 3D sonography and magnetic resonance[J].Measurement,2012,45(4):702-710.
