一种压电驱动的角位移微动平台设计与优化
2021-07-01姚敬松薛增喜麦仁标
姚敬松 薛增喜 麦仁标
摘要:为满足高精度微纳定位需求,设计了一种基于压电驱动的三自由度角位移微动平台,并测试与优化了其性能。
关键词:压电驱动;角位移;微动;三自由度
0 引言
随着微纳米技术的发展,近几十年来,国内外越来越多的研究机构、学者开始重视微纳定位技术的研究,其中微角度位移平台主要在遥感卫星、精密加工、生物、化学、医学等领域得到了广泛运用。要想实现精密运动,驱动机构是关键。压电陶瓷驱动器具有响应速度快、分辨率高、体积小、不发热以及无摩擦等优点,是一种理想驱动[1-6]。本文采用压电陶瓷作为驱动完成一种角位移微动平台的设计与制造。
1 平台设计
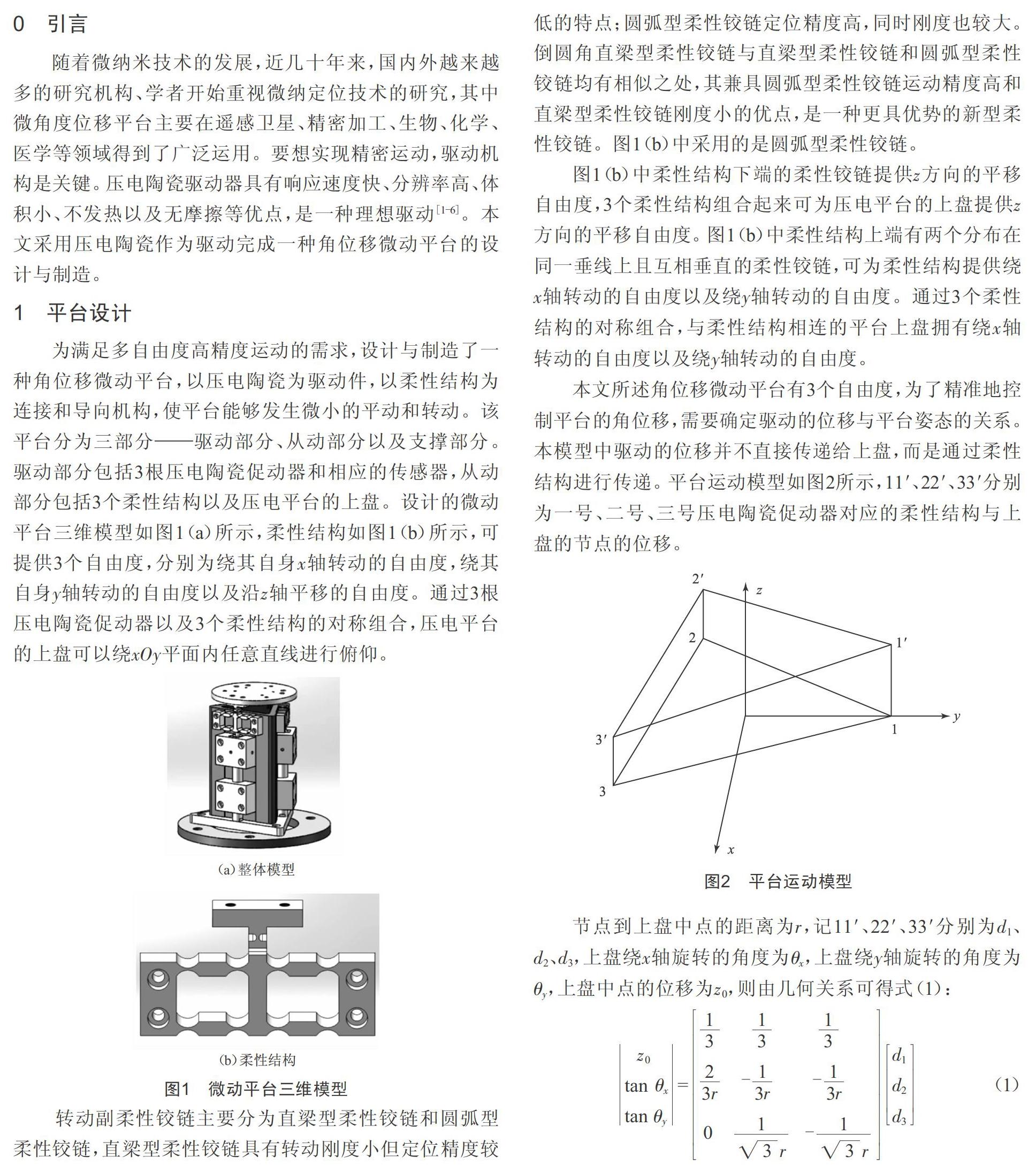
为满足多自由度高精度运动的需求,设计与制造了一种角位移微动平台,以压电陶瓷为驱动件,以柔性结构为连接和导向机构,使平台能够发生微小的平动和转动。该平台分为三部分——驱动部分、从动部分以及支撑部分。驱动部分包括3根压电陶瓷促动器和相应的传感器,从动部分包括3个柔性结构以及压电平台的上盘。设计的微动平台三维模型如图1(a)所示,柔性结构如图1(b)所示,可提供3个自由度,分别为绕其自身x轴转动的自由度,绕其自身y轴转動的自由度以及沿z轴平移的自由度。通过3根压电陶瓷促动器以及3个柔性结构的对称组合,压电平台的上盘可以绕xOy平面内任意直线进行俯仰。
转动副柔性铰链主要分为直梁型柔性铰链和圆弧型柔性铰链,直梁型柔性铰链具有转动刚度小但定位精度较低的特点;圆弧型柔性铰链定位精度高,同时刚度也较大。倒圆角直梁型柔性铰链与直梁型柔性铰链和圆弧型柔性铰链均有相似之处,其兼具圆弧型柔性铰链运动精度高和直梁型柔性铰链刚度小的优点,是一种更具优势的新型柔性铰链。图1(b)中采用的是圆弧型柔性铰链。
图1(b)中柔性结构下端的柔性铰链提供z方向的平移自由度,3个柔性结构组合起来可为压电平台的上盘提供z方向的平移自由度。图1(b)中柔性结构上端有两个分布在同一垂线上且互相垂直的柔性铰链,可为柔性结构提供绕x轴转动的自由度以及绕y轴转动的自由度。通过3个柔性结构的对称组合,与柔性结构相连的平台上盘拥有绕x轴转动的自由度以及绕y轴转动的自由度。
本文所述角位移微动平台有3个自由度,为了精准地控制平台的角位移,需要确定驱动的位移与平台姿态的关系。本模型中驱动的位移并不直接传递给上盘,而是通过柔性结构进行传递。平台运动模型如图2所示,11′、22′、33′分别为一号、二号、三号压电陶瓷促动器对应的柔性结构与上盘的节点的位移。
2 实物模型与控制优化
在微动平台的三维模型基础上,通过仿真软件进行力学与运动学的仿真,在仿真实验分析后,根据三维模型设计进行实物平台的加工,并进一步进行实物测试。压电驱动的角位移微动平台实物模型如图3所示,在该模型中,柔性结构的放大比例为等倍比例,主要作用为提供转动自由度,因此该模型理论上驱动的位移等价于柔性结构传递的位移。
根据式(2)可通过驱动的位移输入计算出理论的输出。可通过激光干涉仪等仪器对平台进行测试,得到理论输出与实际输出的对比结果。通过对比结果发现理论输出与实际输出有所差距。零件加工精度的误差、平台装配造成的误差、柔性结构负载损失的位移等均会使理论输出与实际输出不一致。为了补偿误差,在式(2)中增加一个系数矩阵E,如式(3)所示:
3 测试
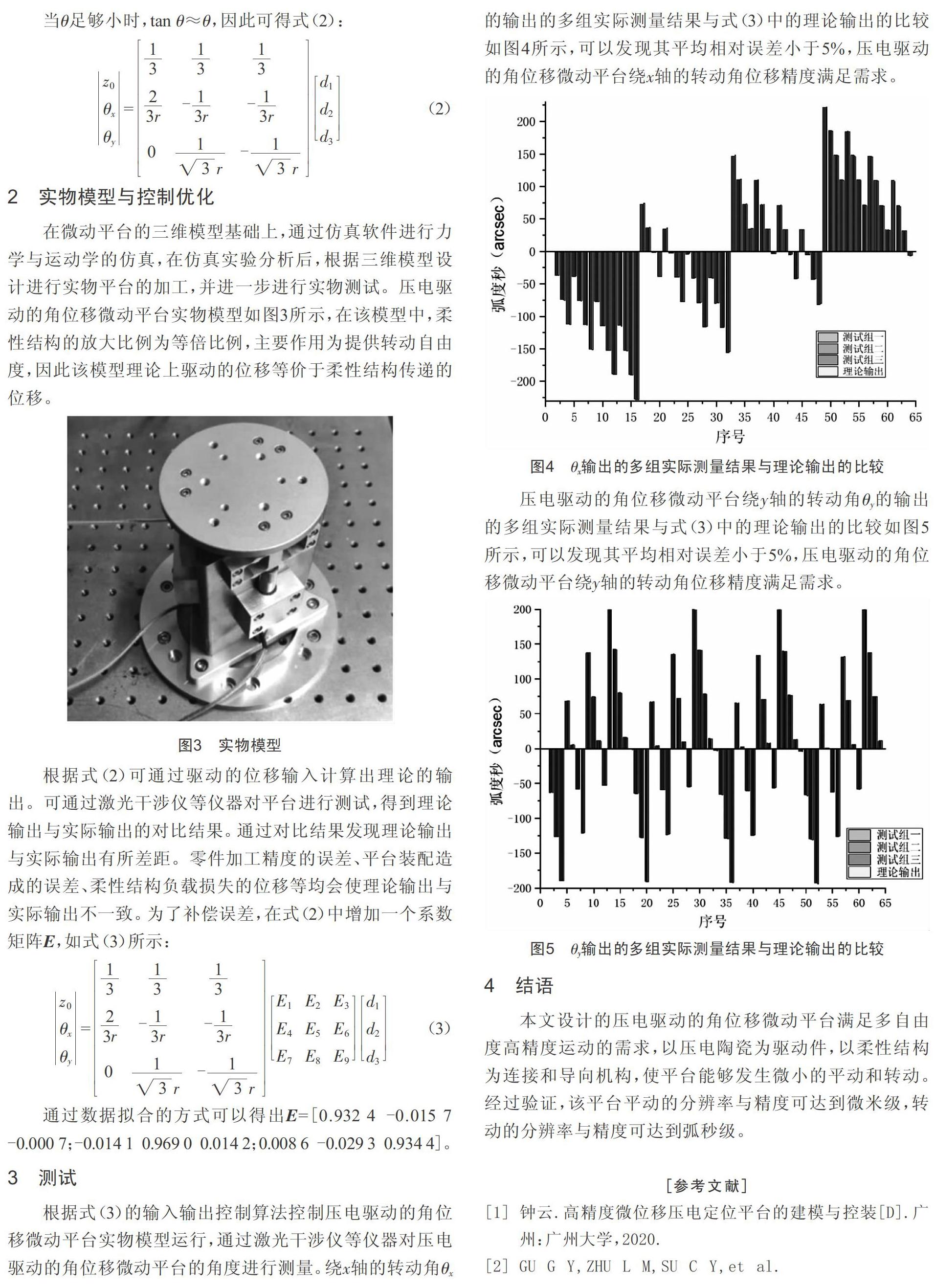
根据式(3)的输入输出控制算法控制压电驱动的角位移微动平台实物模型运行,通过激光干涉仪等仪器对压电驱动的角位移微动平台的角度进行测量。绕x轴的转动角θx的输出的多组实际测量结果与式(3)中的理论输出的比较如图4所示,可以发现其平均相对误差小于5%,压电驱动的角位移微动平台绕x轴的转动角位移精度满足需求。
压电驱动的角位移微动平台绕y轴的转动角θy的输出的多组实际测量结果与式(3)中的理论输出的比较如图5所示,可以发现其平均相对误差小于5%,压电驱动的角位移微动平台绕y轴的转动角位移精度满足需求。
4 结语
本文设计的压电驱动的角位移微动平台满足多自由度高精度运动的需求,以压电陶瓷为驱动件,以柔性结构为连接和导向机构,使平台能够发生微小的平动和转动。经过验证,该平台平动的分辨率与精度可达到微米级,转动的分辨率与精度可达到弧秒级。
[参考文献]
[1] 钟云.高精度微位移压电定位平台的建模与控装[D].广州:广州大学,2020.
[2] GU G Y,ZHU L M,SU C Y,et al.Motion control of piezoelectric positioning stages:modeling,controller design,and experimental eva-luation[J].IEEE/ASME Transactions on Mechatronics,2013,18(5):1459-1471.
[3] ZHOU M L,WANG Y F,ZHANG Y N,et al.Hysteresis inverse compensation-based model reference adaptive control for a piezoelectric micro-positioning platform[J].Smart Materials and Structures,2021,30(1):015019.
[4] LI P Z,ZHANG D F,LENNOX B,et al.A 3-DOF piezoelectric driven nanopositioner:design,control and experiment[J].Mechanical Systems and Signal Processing,2021,155(2):107603.
[5] 邱迁,关均铭,郭晓晖,等.用于角位移补偿的新型XYθ微动定位平台[J].机械工程与自动化,2018(5):38-39.
[6] 徐骁.三自由度纳米定位平台设计与控制[D].上海:上海交通大学,2016.
收稿日期:2021-03-29
作者简介:姚敬松(1996—),男,广东广州人,硕士研究生,研究方向:微纳加工制造。
