里程计技术发展综述
2019-02-07李传立尚俊娜李芳
李传立 尚俊娜 李芳


摘要:里程计是实现载体定位、完成导航任务的重要工具。介绍了里程计的概念及其从纯机械式里程计、机械一电子式里程计、纯电子式里程计至视觉里程计的发展历程,重点介绍了视觉里程计工作原理,分析了不同里程计的优缺点,并对视觉里程计的间接法、直接法和半直接法进行比较分析。
关键词:里程计;纯机械式;机械一电子式;纯电子式;视觉里程计
DOI:10.11907,rjdk.191259
中图分类号:TP301 文献标识码:A 文章编号:1672-7800(2019)012-0006-05
0引言
里程计是测量行程的装置。在轮式自主导航系统中,里程计是一个重要组成部分,可以获取载体运动的距离和速度信息,其关系到载体定位和导航任务的实现。据史书记载,远在1800多年前东汉时期,张衡就发明了以齿轮传动著称的记里鼓车,这是我国最早的纯机械式里程计。汽车早期使用的里程计和记里鼓车一样,均采用纯机械零件设计。随着电子器件及技术的发展与应用,里程计由纯机械式发展为机械一电子式、纯电子式。近年来,随着图像处理技术的发展和计算机性能的快速提升,使里程计由机器视觉实现成为可能。视觉里程计(Visual Odometer,VO)的概念由Nist6r提出,指通过机器视觉技术处理相关图像序列,实现实时估计移动载体位姿(位置和姿态)变化的计量仪。它不但能得到里程信息,还能得到位姿信息。本文通过梳理里程计发展脉络,分别对纯机械式里程计、机械一电子式里程计、纯电子式里程计、VO原理及关键技术进行讨论,重点对VO原理及各类方法进行介绍。
1传统里程计
1.1纯机械式里程计
记里鼓车和指南车的基本原理相同,也是利用齿轮机构的传动关系实现计量。记里鼓车通过车上的一套减速齿轮系统,在车行驶一里时,最末齿轮牵动木人鼓槌击鼓一次,以示走过的里程。现代纯机械式里程计变为由数字指示轮和蜗轮蜗杆机构组成。当汽车行驶时,变速箱主动轴上安装的里程计主动轮(蜗杆)驱动里程计被动齿轮(蜗轮)转动,然后蜗轮驱动钢丝软轴转动,钢丝软轴再驱动仪表盘上的蜗杆蜗轮转动计数器,从而显示里程数。
1.2机械一电子式里程计
机械一电子式里程计与纯机械里程计相比,最主要区别是采用电子传感器取代了钢丝机械一电子式里程计。电子传感器有光电耦合式和磁电式两种,安装在变速箱的蜗杆上。当汽车行驶时,里程计被动齿轮驱动电子里程表传感器内的磁钢作圆周转动,磁钢每转一周,电子里程表传感器就输出N个(一般为个8或10个)脉冲信号,经由连接线束传给车速里程表。传来的磁电脉冲信号或光电脉冲信号经过微处理器处理后,即可得到速度信息,根据速度信息和累计运行时间又可得到里程信息。
1.3纯电子式里程计
纯电子式里程计与机械一电子里程计最大区别在于电子传感器不与任何机械部件直接接触,传感器与靶轮之间存在1.4±0.6mm的间隙。当汽车行驶时,里程计转子与变速器主轴转动。由于里程计转子磁场的作用,里程计转子的齿轮与传感器探头对准和没对准时分别输出低电平和高电平,这样变数箱输出轴每转动一圈,里程计传感器就会输出相应的方波脉冲信号,和机械一电子式里程计相同,对里程计传感器输出脉冲信号进行处理即可得到里程信息和速度信息。因为减少了蜗轮蜗杆间的误差,里程数和车速更加准确,并且由于里程计传感器没有机械接触,加工和维修成本低,可靠性和准确性更好。
2视觉里程计
随着图像处理技术的发展和计算机性能的提高,里程计技术发生了变革,出现了以光学传感器为基础的视觉里程计(VO)。近年来,VO被广泛应用于各种自主导航机器人上,其中最有名的应用是美国“勇气号”和“机遇号”火星探测器,以及特斯拉自动驾驶系统。
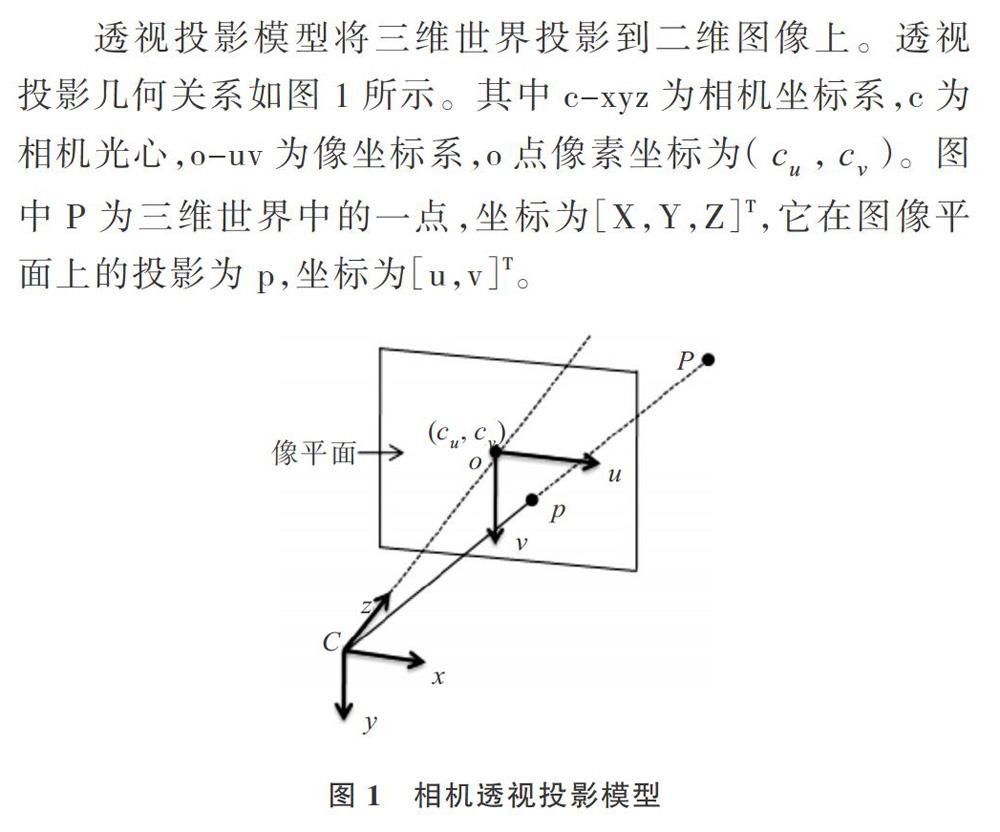
2.1VO原理
由相似三角形对应边成比例,可得到三维到二维的透视投影方程。
估计一系列图像间的变换矩阵,集成所有变换矩阵即可恢复相机的全部轨迹。因为VO是增量式重建运动轨迹,所以累计误差不可避免,需要进行优化得到更加精确的运动轨迹。目前主流优化方法是光束法平差(BundleAdjustment,BA),求解误差最小的特征点空间坐标和相机位姿。
按所用图像信息不同,VO可分为提取特征的间接法VO、不提取特征的直接法VO,及将二者结合的半直接法VO。表1为经典的VO研究成果。下文分别对VO类别进行详细介绍。
2.2间接法VO
间接法VO又称为特征点法VO。基于特征点法的VO运行稳定,对动态物体以及光照不敏感,是目前比较成熟的VO解决方案,长久以来被认为是主流方法,并逐渐形成了一个完整流程体系。基于特征点法的VO流程如图3所示,主要由特征模块、运动估计模块和优化模块3个模块组成。
特征模块主要完成特征点提取、特征点匹配以及误匹配剔除工作。特征点由关键点和描述子两部分组成。描述子是对关键点信息的描述,为特征匹配提供依据。研究者们设计了许多稳定的图像特征,如SIFT(scale-invari-ant Feature Transform,尺度不变特征变换)、SURF(speed-ed Up Robust Features,加速稳健特征),二者充分考虑了图像变换过程中的问题,但带来了较大的计算量,所以难以满足实时性需求。为了满足VO实时性要求,研究者们又提出ORB(Oriented FAST and Rotated BRIEF)特征,ORB融合FAST(Features from Accelerated Segment Test)角點和BRIEF(Binary Robust Independent Elementary Fea-tures)描述子,使得其在尺度、旋转、亮度以及计算速度等方面具有良好的特性。
特征匹配是特征点法VO中极为关键的一步,它解决了数据相关联问题。最简单的特征匹配方法是暴力匹配(Brute Force,BF)。但特征点较多时,暴力匹配的运算量很大,此时选择快速近似最近邻算法(Fast Library for Approxi-mate Nearest Neighbors,FLANN)更加合适。在匹配过程中,由于各种原因难以完全避免误匹配,最简单的筛选方法是基于阈值的方法,还可以使用随机采样一致性(Ran-dom Sample Consensus,RANSAC)算法剔除外点(误匹配点)。
运动估计模块计算相机在当前帧Ik和前一帧Ik-1之间的变换矩阵Tk,k-1。计算Tk,k-1有2D-2D、3D-3D和3D-2D 3种方法。2D-2D是用二维图像点对计算运动参数,一般用于单目视觉;3D-3D是由三维点对计算运动参数,通常用于立体视觉;3D-2D是由三维点对和二维图像点对计算运动参数,将已获得的三维坐标投影到当前二维图像中求解。
在初期VO后端优化中,主要使用滤波方法。2003年Davison提出的MonoSLAM(Monocular Simultaneous Local-ization and Mapping)方法优化即基于EKF框架。后来研究人员将SFM(structure From Motion,运动推断结构)中的非线性优化方法BA引入VO研究中,成为后端优化的主导方法,其中PTAM(Parallel Tracking and Mapping)是第一个以BA为后端优化的程序。
现有研究成果中实用性最好的基于特征的VO是ORB-SLAM2,它由跟踪、建图、回环检测3个线程组成。其中,跟踪线程主要完成图像ORB特征提取及匹配,并粗略估计相机位姿;建图线程主要使用BA对局部特征点和相机位姿进行优化,求解误差最小特征点空间坐标和相机位姿;回环检测线程主要实现基于关键帧的回环检测,能消除误差累计、实现全局重定位。同时ORB-SLAM2中有单目、RGB-D和双目相机3种模式,使其具有良好的泛用性。
2.3直接法VO
直接法VO指直接根据图像灰度值计算相机运动的方法。像素灰度不变假设认为,同一个空间点的像素灰度值在各个图像中是固定不变的。直接法避免了计算特征的时间,适用于特征缺失的场景。只要场景中存在明暗变化,直接法就能工作,所以该方法在近年来获得了快速发展。直接法由光流演变而来,能够不提取特征,通过最小化光度误差(Phometric Error)计算相机运动和像素的空间位置。根据使用像素的数量,直接法又可以分为稀疏直接法、半稠密直接法和稠密直接法。
早期有一些使用直接法的研究,但直到RGB-D相机出现后,人们才发现直接法对RGB-D相机以及單目相机均是行之有效的方法。近期出现的一些直接法直接使用图像像素点的灰度信息和几何信息构造误差函数,通过图优化求解最小化代价函数,从而得到最优相机位姿,且用位姿图表示大规模地图问题的处理。
LSD-SLAM(Large-scale Direct Monocular SimultaneousLocalization and Mapping)是Engel等为了构建半稠密三维地图提出的算法,该算法在计算相机位姿的同时还能构建大规模三维地图。采用直接法进行数据关联,由深度估计、跟踪和建图3个线程组成。LSD-SLAM使用权值高斯一牛顿迭代方法最小化光度值误差。因为单目相机缺少尺度信息,该方法通过规定所有像素点逆深度均值为1控制全局地图的尺度,最后进行回环检测,并采用光束平差法优化全局地图。
直接稀疏里程计(Direct Sparse Odometry,DSO)也是Engel提出来的一种单目稀疏直接法视觉里程计,并在2017年扩展为双目功能。该方法将完全直接的概率模型(最小化光度误差)与所有模型参数的一致联合优化相结合,对图像中平滑变化的点均匀采样以降低计算量。其模型集成了全光度校准,考虑了曝光时间、镜头渐晕和非线性响应功能。该方法在鲁棒性、精准性和实时性方面较之前的LSD-SLAM均有较大提高。
2.4半直接法VO
特征点法VO不适用于缺少特征的场景和没有明显纹理的地方,并且特征点提取和描述子计算很耗时;直接法VO存在非凸性、单个像素没有区分度和灰度不变性假设性太强等问题。但二者也有各自的优点,因此2014年For-ster等在特征点法和直接法优点的基础上,提出了半直接法视觉里程计(semi-direct Visual Odometry,SVO),该系统是基于半直接法的单目视觉里程计。SVO结合了基于特征方法的成功因素与直接方法的准确性和速度,虽然还是通过直接法获取位姿,但该方法比之前的单一方法更精确、更稳健、更快速。
SVO系统采用单目相机,所以深度估计是构建点云地图的前提与核心。它采用高斯分布和均匀分布的混合概率模型建图。首先使用直接法求解位姿进行匹配,然后使用经典的Lucas-Kanade光流法匹配得到子像素精度,最后结合点云地图计算最小化重投影误差实现优化。
SVO整个过程只在选取关键帧时依赖特征,不需要计算特征点描述子或进行误匹配剔除,所以更加高效。同时相比于直接法,不用对整张图像进行匹配以获取相机位姿,这样也增强了算法高效性和鲁棒性。PL-SVO(Semi-direct Monocular Visual Odometry by CombiningPoints and Line Segments)通过扩展SVO算法,能够处理无纹理环境的系统;FSVO(semi-direct Monocular VisualOdometry Using Fixed Maps)使用固定地图的半直接法VO框架,算法基于固定地图而不是增量地图,并提出了新的关键帧选择标准和重定位方法。
3优缺点分析
本文对里程计的发展进行了回顾。传统里程计中纯机械式里程计因为采用钢丝软轴,会出现钢丝软轴金属疲劳而断裂,引起里程计不能工作以及速度表指针指示不稳等现象。机械一电子式和纯电子式里程计采用电子传感器取代了钢丝软轴,克服了纯机械式里程计中由于钢丝软轴造成的缺陷,但是传统里程计仍然不能消除道路不平、轮胎打滑等情况的影响,而VO不受到道路不平和轮胎打滑的影响,还适用于非轮式移动载体。VO在提供里程、位姿的同时,还能提供场景图像信息,可用于实现区域巡检、目标检测与跟踪、障碍识别与路径规划等。间接法VO一直是比较经典的方法,其鲁棒性主要建立在特征点的描述子描述基础上,虽提高鲁棒性,但增加描述子算法复杂度,降低实时性,由于间接法存在局限性,无法应用于特征较弱和无特征的场景。直接法VO可以适用于特征较弱和无特征的场景,由于不用特征描述和匹配,稀疏直接法能够适用于快速运动的运行情况,也适用于需要构建半稠密或者稠密地图的场景,这是间接法无法实现的。但直接法基于灰度不变性的假设太牵强,易受到意外光照影响,因此直接法的研究和应用没有间接法成熟。基于混合的半直接法具有速度快,兼具间接法和直接法的优点及场景适应力较强等长处,但是由于跟踪的特征较少,在一些特殊的情况下会丢失跟踪。
4结语
本文以里程计的技术发展为主线,对里程计技术进行了回顾和综述。相比于传统里程计,VO很好地克服了传统里程计因为轮胎打滑而造成误差的问题,而且适用于非平面运动环境和非轮式运动载体应用。另外VO除能提供里程信息外,还能提供每个时刻的位姿情况,且能获得更多的环境图像信息用于三维重建、目标跟踪、避障和路径规划等,应用范围很广。从里程计技术的发展历程来看,机械产品经历了从纯机械向机械与电器电子结合、至现在与光学等传感技术融合的过程。在多源技术融合过程中,计算显得越来越重要,因此算法和软件技术应被给予更多的重视,以提高其智能化水平。
