车载自主导航系统里程计误差在线标定方法
2020-01-14刘鹏飞师鹏宇智奇楠马国驹贾浩男李枭楠
刘鹏飞,师鹏宇,智奇楠,马国驹,贾浩男,李枭楠
(1.卫星导航系统与装备技术国家重点实验室,石家庄 050081;2.中国电子科技集团公司第五十四研究所,石家庄 050081;3.92493 部队,葫芦岛 125000)
车载自主导航系统被广泛应用于自行火炮、导弹发射车、前线侦察车等现代陆地作战车辆上,捷联惯性导航系统(SINS)是自主导航系统定位定向的核心设备,但其由于惯性测量单元(IMU)本身存在测量误差,导致惯导系统的定位定向误差随时间累积,不利于长时间长距离的高精度导航[1-2]。
卫星导航系统(GNSS)导航精度高、范围广,不受时间和空间限制,但其信号容易受到干扰和遮挡,在没有卫星导航信号或者信号质量较差的路段,无法提供定位服务或定位精度较差,而车辆安装的里程计(OD)通过输出位置增量信息,利用航位推算(DR)算法可实现完全自主导航,但是里程计本身受车辆安装位置、轮胎气压、轮胎磨损程度以及车辆载荷等因素影响,会直接导致标度因数误差和车辆安装误差等发生变化[3],所以在SINS/ DR 自主导航解算前,必须对里程计的误差项进行在线标定和补偿[4-6]。文献[7]对设定已知路标点的传统里程计标定方法进行了详细介绍,传统标定方法要求车辆尽量沿直线行驶,高程变化尽量小等诸多条件限制,实际使用过程中存在很多不便;文献[8]提出了一种基于运动学非完整约束的里程计参数在线辨识方法,该文献使用加速度之差和速度之差作为滤波器观测,但该方法实际动态测试结果中里程计误差参数估计值收敛时间较慢,难以满足快速机动的载车要求;文献[9]将里程输出速度与惯导输出速度做差作为观测,增加故障检测模块,对车轮打滑、滑行和侧滑进行了故障检测,从而提高了里程计误差辨识的准确性;文献[10]将里程计输出位置信息与惯导输出位置信息做差作为观测,将估计出的误差信息进行反馈校正,构成紧组合导航系统,如果滤波器估计出的误差值不够准确,反馈到滤波器中反而会污染整个组合导航系统;文献[11]-[12]利用车辆运动约束方法对里程计标度因数误差进行在线标定,但没有对安装误差角进行标定修正;文献[13]利用GPS 位置、速度信息对里程计的误差进行标定修正,但是系统引入了卫星导航系统,在卫星信号质量较差或没有卫导信号时,自主导航系统的使用会受到限制;文献[14]利用扩展卡尔曼滤波器对里程计误差进行在线估计和补偿,提高了自主导航系统的鲁棒性。
本文提出一种车载自主导航系统里程计在线标定方法。将里程计航位推算的位置信息与惯性导航系统解算的位置信息之差作为组合导航滤波器的量测更新数据,同时将里程计的航位推算位置误差、安装误差角、标度因数误差列入传统的组合导航滤波器状态量中并进行实时估计,实现对里程计误差的在线标定。
1 SINS/DR 自主导航系统误差分析
选取东北天地理坐标系作为导航坐标系,记为n 系;假设里程计坐标系与车体坐标系重合,记为m 系,ox 轴沿车体横轴方向指向右方,oy 轴沿车体纵轴指向正前方,oz 轴垂直于地面向上,和ox轴、oy 轴构成右手直角坐标系,即构成一个右-前-上坐标系;载体坐标系,即惯导坐标系记为b 系,坐标轴向定义与车体坐标系一致;
1.1 捷联惯导系统误差分析
技术研究
参照文献[7]列出捷联惯导系统的位置误差方程、速度误差方程和姿态误差方程如下:

1.2 航位推算位置误差分析
首先在不考虑里程计安装误差角的情况下推导航位推算位置误差。
假设里程计的测量误差主要是标度因数误差,记为δKD,则里程计测量的实际速度大小和理论速度大小的关系在里程计坐标系m 下可用式(2)表示如下:



将式(4)、(2)代入到式(3)中可得:


在不考虑里程计安装误差角的情况下,里程计航位推算位置误差方程与捷联惯导系统位置误差方程一致,表示如下式:

式中,下标D 表示航位推算系统误差,将式(6)代入到式(7)可得含里程计标度因数误差的位置误差方程:

然后在考虑里程计安装误差角的情况下推导位置误差方程。
通常在安装惯组时会尽可能使惯导系统与车体坐标系重合,即要求惯导坐标系与里程计坐标系重合,但受到安装工艺的限制,惯导坐标系和里程计坐标系间存在安装偏差角,即里程计安装偏差角,分别记为俯仰安装偏差角、横滚安装偏差角和方位安装偏差角,惯导坐标系到里程计坐标系的转换矩阵可表示为:


由式(10)可以看出,由于里程计安装偏差角的存在,里程计位置增量输出在惯导坐标系上存在x、z 轴的分量输出误差,并且输出误差只跟俯仰安装偏差角和方位偏差误差角有关。
航位推算误差源主要包括:里程计平台失准角φD、里程计安装偏差角αθ和αψ中未能完全补偿的剩余俯仰安装误差角δαθ和方位安装误差角δαψ以δKD及里程计标度因数误差,安装误差角和安装偏差角间的关系可表示如下:
里程计位置增量输出在导航坐标系下的投影为:
对式(12)进一步处理,忽略误差项的二阶和高阶小量,可得:


通常意义上,里程计安装偏差角均为小角度,车辆行驶过程中惯组的俯仰角和横滚角也为小角度值,所以惯组坐标系到导航坐标系可进一步简化为只与方位角相关的转换矩阵:

矩阵Ma可进一步简化为常值矩阵:

将式(15)、(16)代入到式(14)等式右边的第二项中,可得:

为进一步提取出俯仰安装误差角δαθ和方位安装误差角δαψ,考虑到:

结合式(18)、式(17)最终可表示成:

将式(19)代入到式(14)可得:

至此,包括里程计标度因数误差、俯仰安装误差角以及方位安装误差角的航位推算位置误差方程已得到。
2 S INS/DR 自主导航系统滤波器设计
状态方程中,选取捷联惯导系统误差中的姿态误差、速度误差、位置误差、陀螺仪漂移、加速度计常值偏置以及航位推算误差中航位推算位置误差、里程计标度因数误差、俯仰安装误差角以及方位安装误差角作为滤波器的状态量,共计21维,具体表示如下:

自主导航系统上电启动后认为陀螺仪漂移、加速度计偏置、里程计安装以及标度因数误差保持为一固定常数不变,即:
再结合式(1)、(20)可得自主导航系统状态方程:

式中,F 为状态转移矩阵;G 为噪声分配矩阵;W 为系统状态噪声阵。
将捷联惯导解算的位置与里程计航位推算的位置之差作为系统观测量,即:

3 车载试验验证
车载试验中自主导航系统由高精度光纤捷联惯性导航系统与里程计组成,其中高精度光纤陀螺仪随机漂移小于0.01/ h(1σ),量程为±300°/s,加速度计偏置稳定性小于50ug(1σ),量程为±6g,里程计标度因数误差小于0.2%。为保证设定已知路标点的传统里程计标定方法的标度结果准确可靠,选取一较为平直约3km 的开阔路段进行标定测试试验,这一路段的高度差在5m以内;里程计安装于测试车辆右后轮的转轴上,光纤惯组固连在车辆行李架上置于车顶,如下图所示,测试过程中使用高精度商用GNSS 接收机提供的位置信息作为自主导航系统的位置参考信息,GNSS 接收机在开阔路段的定位精度优于3m(RMS)。

图1 车载自主导航系统设备安装图
使用传统里程计标定方法得到的里程计标度因数误差为-0.16%,俯仰安装误差角为-1.0587°,方位安装误差角为1.86°则使用上述里程计在线标定方法得到的里程计误差曲线如下图所示:由图2 可知,最终估算的标度因数误差为-0.12%,俯仰安装误差角为-1.064°,方位安装误差角为1.866°,标定结果与传统标定方法得到的结果是一致的。

图2 里程计在线标定估计的误差曲线
将上述里程计标定的里程计误差参数装订到自主导航系统中进行动态测试,动态测试路线如图3所示,车辆行驶总里程约40km,测试总时间约3,400s。
自主导航系统位置误差如图4所示,由图中可知,在大约2,000s 处,车辆回到初始点,此时的水平位置误差最小,均在5m以内,随后当车辆再次驶离初始点后,水平位置误差又开始逐渐增大,整个过程中水平位置误差不大于30m,定位精度满足0.1%D的陆用导航精度要求,整个过程中高度误差都是在逐渐增大的,可见高度误差在自主导航系统是不容易控制和约束的。
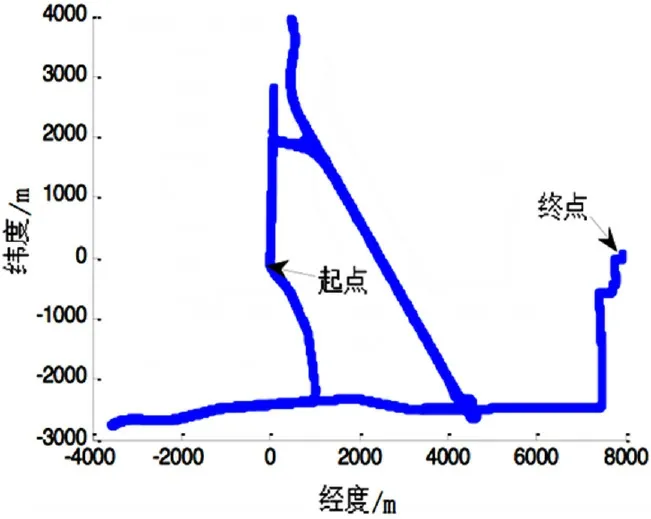
图3 动态测试路线图

图4 自主导航系统位置误差曲线
4 结束语
针对车载自主导航系统存在的里程计安装误差和标度因数误差影响其导航精度的问题,本文提出了一种车载自主导航系统里程计误差在线标定方法,在考虑里程计标度因数误差、里程计安装误差角的情况下,推导了航位推算位置误差方程,将航位推算位置误差、里程计标度因数误差、安装误差角列入传统的组合导航滤波器的状态量中,使用捷联惯导系统解算的位置与航位推算的位置之差作为滤波器的观测值,进行滤波器的量测更新,与传统里程计标定方法相比,验证了这种里程计误差在线标定方法的正确性,通过实际的动态跑车测试,进一步验证了里程计误差参数标校的正确性和可靠性。
