露天矿区里程计辅助的GPS/INS车辆导航算法研究
2018-09-13高井祥李增科
高井祥李增科
(1.中国矿业大学环境与测绘学院,江苏 徐州221116;2.中国矿业大学江苏省资源环境信息工程重点实验室,江苏 徐州221116)
0 引 言
露天矿区车辆利用GPS/INS组合导航过程中,由于数据传输或者卫星信号遮挡问题,GPS信号可能发生中断,会导致INS误差积累,或者GPS信号恢复后引起滤波发散[1],进而降低导航的精度甚至使导航数据完全不能使用。陈允芳[2]指出陆地车载测图应用中GPS信号频繁中断,仍需增加传感器以辅助GPS/INS完成高精度的位置和姿态测定。RBF神经网络训练收敛速度和稳定性有较大优势[3],所以利用神经网络预测GPS信号缺失情况的各导航参数误差方法被应用[4]。Godha[5]通过零速更新方法通过增加虚拟观测值的方式来限制INS误差累积。神经网络、支持向量机等方法的引入会增加组合导航算法的复杂性,影响实时效果,容易引起数据解算延迟等问题,而在GPS和INS之外增加其他低精度传感器控制短时间的INS误差漂移,既不会大幅增加算法的复杂性,又能得到良好效果。
基于此,本文在传统GPS/INS组合导航基础上,引入了里程计传感器。使GPS、INS和里程计融合,实现GPS信号中断过程中INS误差实时修正,保证露天矿区车辆导航的精度和连续性。
1 里程计速度和位置解算
设定里程计所输出的载体运动速度记为v O,其方向指向载体的正前,因此里程计观测的载体的运动速度的表达式在导航坐标系可以写成[6-7]:

式(1)中,为载体坐标系到导航坐标系的方向余弦转移矩阵。
里程计的速度可以通过直接观测进行坐标系转化获取,位置则是通过转化的速度积分计算获得,位置的微分计算方程表达式写为[8]:
式(2)中,L O、λO和h O为里程计通过速度积分计算所得到的经度、纬度和高度信息,R M和R N为运动载体所在位置的地球子午圈和卯酉圈曲率半径,、和为导航坐标系下NED三个方向的速度分量。
由于里程计的位置和速度信息采集属于离散采样,所以根据位置的微分方程,可以推导出里程计的位置离散化计算方法[9-10]:

式(3)中,(k-1)表示里程计在k-1时刻的位置信息,(k)表示里程计在k时刻位置信息,Δt为里程计数据采样时间间隔。
2 组合导航模型
2.1 组合导航动力学模型
组合导航的动力学模型的构建基于运动学物理学模型及INS误差方程[11]:
式(4)中,,和分别为INS的位置、速度和姿态三者在三个不同方向的误差向量;为地理坐标系相对于地球坐标系的旋转角速度;为地理坐标系相对于惯性坐标系的旋转角速度;为地理坐标系相对于惯性坐标系的旋转角速度;是加速度计所测量的比力值。加速度计观测值误差和陀螺仪观测值误差模型为:

式(5)—(6)中,和是高斯白噪声。
综合(4)-(6)式,动力学模型为:

将其写成矩阵表达式:

其中,为误差状态向量,Φ为状态转移矩阵,为状态噪声。
2.2 组合导航观测模型
GPS和里程计均可以输出载体的位置和速度作为Kalman滤波的观测值,所以两者和INS组合导航的观测模型相似。取传感器(GPS和里程计)和INS输出的位置和速度之差构造Kalman滤波的观测值[12-13]:

式(9)中,Z p(t)是 Kalman滤波位置观测输入值;Z v(t)是Kalman滤波速度观测输入值,H k为观测矩阵;ν为观测噪声。
Z p(t)和Z v(t)的计算式为[14]:

式(10)—(11)中:r S(t)和v S(t)分别是传感器的位置和速度观测值;r INS(t)和v INS(t)分别是INS计算的位置和速度值。
3 里程计辅助的GPS/INS组合导航
里程计和GPS都能提供组合导航的位置和速度观测值,作为观测值输入到Kalman滤波器中。相对于里程计,GPS数据精度更高[15],所以,在GPS信号未中断的情况下,使用里程计数据会降低整个观测值的精度,从而影响滤波效果。因此当有GPS信号的时候,只采用GPS信号作为观测值,当GPS缺失时,采用里程计信号作为观测值。GPS和里程计两者提供的观测值精度不同,所以滤波器观测值的方差-协方差阵存在很大区别,而且,两者的观测信息输入的滤波器信息采样频率不同,因此,两种传感器采用的Kalman滤波器应该分别设置(图1)。

图1 里程计辅助的GPS/INS组合导航算法
4 实验分析
为验证本文算法的导航效果,进行车载实验。实验采用2台LAICA-GPS接收机、1台里程计和1台惯性测量单元,1台GPS接收机作为静止参考基站,另1台GPS接收机和惯性测量单元、里程计一起安置在运动车辆内(GPS天线安装在车顶),实验采用MEMS级别惯性测量单元,将惯性测量单元性能参数统计如下(表1)。INS数据采集频率为100 Hz,里程计数据更新频率为10 Hz,GPS数据采样周期为1 s。GPS-RTK解算的位置值作为参考值。
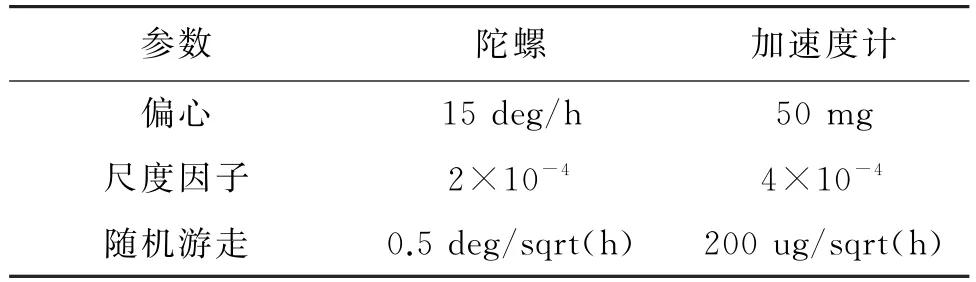
表1 惯性测量单元性能
为验证GPS丢失情况下GPS/INS组合导航的性能,选取的GPS时间序列在导航过程中有丢数的现象(主要是数据传输的问题)(图2),并验证本文加入里程计后的GPS/INS组合导航的精度。
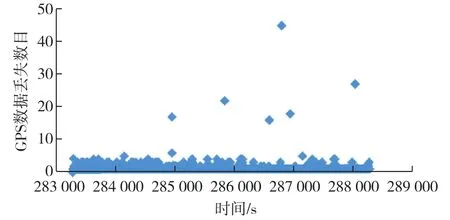
图2 GPS数据丢失情况
车载观测数据处理采用两种方案进行。
方案1:无里程计辅助的GPS/INS组合导航。
方案2:里程计辅助的GPS/INS组合导航。
以下分别是两种方案在北东地三个方向的误差(图3-4)。由于位置误差(与参考值比较)较小,以经纬度为单位的方式表达位置误差,不便于直观理解,因此,把位置误差以参考位置为原点转换到NED坐标系。从图3-4可以看出,由于GPS信号的中断,GPS/INS导航解部分区域误差较大,NED三个方向的误差最大值均大于30 m,严重影响了组合导航的效果,尤其是在GPS信号缺失的时间段,误差最大值甚至达到了100 m。在车辆导航过程中,即使引入地图修正方法,很难使100 m的误差得到很好修正。引入里程计辅助的组合导航,导航参数误差得到了及时修正,NED三个方向的误差最大值均小于20 m,能够保证导航的效果。
为更加清晰直观地比较两种方案的误差,对NED三个方向的误差最大值和均方差进行统计(表2)。可以看出,方案1在NED三个方向的误差最大值分别达到了40.324 m、38.776 m和79.693 m,不能满足导航的要求,说明在GPS信号缺失的情况下,INS导航效果较差,可靠性低,加入了里程计辅助的GPS/INS组合导航误差在NED三个方向的最大值分别为11.336 m、8.056 m和19.782 m,除D方向外,其他两个方向的误差基本在10 m以内,可以为导航提供良好保证。比较方案1和方案2的均方差,可以得到类似结论:加入里程计辅助,可以很好修正GPS信号缺失阶段的导航参数误差。
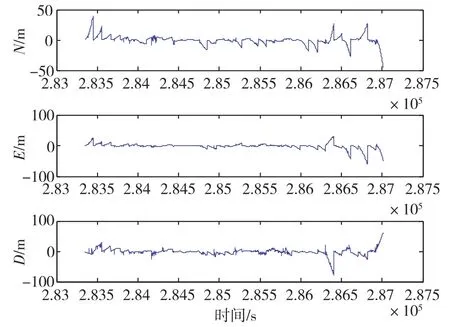
图3 无里程计辅助的GPS/INS组合导航误差

图4 里程计辅助的GPS/INS组合导航

表2 位置误差
5 结 语
针对露天矿区车载GPS信号中断过程中INS误差快速累积导致导航精度降低的问题,提出了利用里程计辅助的GPS/INS组合导航的算法,利用里程计计算的位置和速度修正GPS信号中断过程导航参数误差。车载实验证明,里程计可以较好完成INS误差的修正,避免误差的快速积累,确保高精度导航结果的输出。本文算法是在GPS信号中断过程中利用里程计输出的坐标和位置对导航参数进行修正的,GPS信号正常情况下的里程计观测值没有得到有效利用,浪费了数据信息,如何将GPS信息和里程计信息进行高效融合是下一步的研究重点。
