大角度斜置激光惯组与里程计组合导航方法
2016-03-16胡华峰
李 旦,刘 明,胡华峰,罗 伟
(湖北航天技术研究院总体设计所,武汉 430040)
大角度斜置激光惯组与里程计组合导航方法
李 旦,刘 明,胡华峰,罗 伟
(湖北航天技术研究院总体设计所,武汉 430040)
针对激光惯组斜置条件下惯组坐标系相对里程计坐标系是大角度的情况,建立了两坐标系之间的转换关系,推导了里程计输出转换的安装误差补偿模型,在补偿模型基础上给出了安装误差计算公式。以惯组位移与里程计位移之差作为量测值,建立了状态和量测方程,运用Kalman滤波技术实现惯组/里程计组合导航,最后通过跑车试验对提出的惯性/里程计组合导航方法进行了验证,结果表明了该方法的有效性。
里程计;大角度;安装误差;组合导航
0 引言
为了满足航天飞行器无准备阵地、无依托发射的要求,必须具备能够实现自主定位定向的能力。惯性导航系统具有自主性及封闭性,能实时输出载体的位置、速度及姿态等信息,但是它难以克服导航误差随时间累积的缺点。里程计是一种自主的距离信息测量传感器,它与惯性导航系统组合之后能够起到抑制惯性误差发散的作用,因此采用惯性/里程计组合方案能够建立高精度自主定位定向导航系统。
激光惯组精度高、稳定性好,是实现高精度自主定位定向的重要组成部分。由于激光陀螺存在死区,激光惯组通常工作在机械抖动偏频模式下,在此模式下激光陀螺噪声较大,难以实现高精度定向。因此将激光惯组斜置,使惯组的3个正交轴与水平面保持一个较大的角度,这样惯组绕天向轴旋转时激光陀螺可以工作在速率偏频模式下,此模式下激光惯组避开了激光陀螺死区,同时激光陀螺噪声小、定向精度高。
里程计测量车辆行进方向的路程增量,通过建立车体坐标系(右前上)将里程计一维输出转换为三维输出,再通过车体系到惯组坐标系的转换以及惯组坐标系到导航系的转换得到里程计在导航系下的投影输出。通常情况下车体系到惯组坐标系是小角度,可以按照小量三角函数近似的方式进行转换。当激光惯组工作在斜置状态下时,3个正交轴与水平面的夹角都是大角度,车体系到惯组坐标系之间的角度关系不能再以小量的形式进行三角近似,需建立坐标系之间的安装偏角关系进行补偿。
1 大角度条件下里程计输出模型
里程计通过输入轴与车辆变速齿轮连接,以脉冲形式输出采样间隔内路程增量;定义车辆行驶过程中速度坐标系为m系,m系X轴朝右、Y轴向前,Z轴与X、Y轴构成右手直角坐标系。里程计脉冲输出在m系内的表达式为
(1)

(2)

(3)
式中,δαψ表示航向安装偏角误差值,δαθ表示俯仰安装偏角误差值,δKod表示刻度系数误差值。将式(3)中三角函数一阶泰勒展开,合并后忽略误差量的二阶及以上小量,得到:
sinαψcosαθ+δαψcosαψcosαθ-
δαθsinαψsinαθ
(4)
cosαψcosαθ-δαψsinαψcosαθ-
δαθcosαψsinαθ
(5)
(6)
将式(4)~式(6)代入式(3)有
(7)

(8)
得到里程计输出计算值与真实值之间的关系为
(9)
2 惯组相对里程计安装偏角标定方法
当惯组与里程计相对安装偏角较大时,需要事先标定安装偏角。由式(2)得到
(10)
(11)

(12)
从而得到中间变量
(13)
式中,Δαφ是计算安装偏角的中间量,进一步得到安装偏角计算公式为:
(14)
利用式(14)得到俯仰安装偏角和航向安装偏角后,再根据式(2)可将里程计输出脉冲数转换为路程增量。需要说明的是上述计算安装偏角的方法同样适用于惯组安装偏角是小角度的情况。
3 惯性/里程计组合导航
(15)

(16)


(17)
4 方法验证与分析
采用实际跑车试验数据对上述方法进行验证,试验用激光惯组陀螺精度为0.003(°)/h,加速度计精度为5.0×10-5g,里程计安装于车辆变速转轴上,同步采集惯组数据和里程计脉冲数。根据第2节的方法标定惯组与里程计安装偏角,出发之前车辆静止惯组完成初始对准,之后车辆机动2h,取前30min数据计算出航向安装偏角αψ和俯仰安装偏角αθ,再以计算得到的安装偏角补偿里程计输出,与惯组数据进行组合导航解算,得到组合导航输出参数。跑车过程中同步采集差分GPS数据作为位置误差比较参考基准。
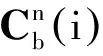
为了分析第2节所述方法计算的准确性,以里程计输出与惯性导航的姿态作航位推算得到导航位置输出,将航位推算结果与GPS结果比较,如图1所示。由于跑车路线为从南往北接近直线,因此近似认为经度方向误差为车辆横向误差,纬度误差为车辆纵向误差。由车辆横向误差与高度误差的数值可以看出,横向误差不超过40m,天向误差不超过20m,因此航向安装偏角αψ和俯仰安装偏角αθ估计值是较为准确的。里程计航位推算纵向方向误差约为220m,主要依据里程计刻度系数误差引起的线性漂移误差在里程计航位推算过程中是逐渐累积的,不可消除,必须通过组合导航滤波估计对刻度系数误差作修正后才能减少误差积累。
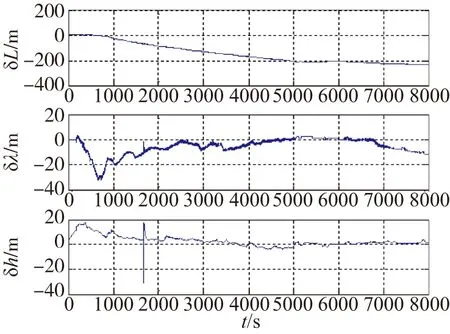
图1 里程计航位推算位置误差Fig.1 Position error of odometer dead-reckoning
图2为惯性/里程计组合导航位置误差结果,从图2可知组合导航修正了里程计刻度系数误差,在纬度方向误差较小,最大不超过20m,而经度方向及高度方向的组合误差与里程计航位推算的误差相当。这一方面说明组合导航对里程计刻度系数误差的修正作用,另一方面说明安装偏角计算值与实际情况相符,从而在横向与垂向航位推算与组合导航效果一致,因为惯性/里程计组合导航主要修正纵向误差。

图2 惯性/里程计组合导航位置误差Fig.2 Position error of IMU/OD integrated navigation
5 结论
惯性/里程计组合是实现自主定位定向的重要方法,针对惯组安装方式存在大角度的情况,建立了大角度安装误差补偿数学模型,它同样适用于小角度的情况。在此基础上给出了安装偏角计算公式,该方法合理可行、易操作,通过跑车试验对方法进行验证,里程计航位推算横向位置误差与高度位置误差表明安装偏角计算方法的正确性,惯性/里程计组合导航位置误差表明Kalman滤波对里程计刻度系数误差的修正作用,通过滤波修正后提高了组合导航的精度。
[1]BevlyDM,ParkinsonB.CascadedKalmanfiltersforaccurateestimationofmultiplebiases,dead-reckoningnavigationandfullstatefeedbackcontrolofgroundvehicles[J].IEEETransactiononControlSystemTechnology, 2007,15(2):199-208.
[2] 严恭敏,秦永元,杨波. 车载航位推算系统误差补偿技术研究[J].西北工业大学学报, 2006,24(1):26-31.
[3]RogersRM.Improvedheadingusingdualspeedsensorsforangularrateandodometryinlandnavigation[C]//IEEEPositionLocationandNavigationSymposium, 1998:177-184.
[4] 秦永元,张洪钺,汪叔华. 卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社, 1998.
[5] 郭振西,缪玲娟,沈军. 里程计组合的捷联惯导系统运动基座对准研究[J].北京理工大学学报, 2005,25(1):67-70.
[6] 李增科,高井祥,王坚,等. 基于位置修正的井下车辆INS/Odometer组合导航系统[J].煤炭学报, 2013, 38(11): 2077-2083.
[7]IlyasM,YangY,QianQS,etal.Low-costIMU/Odometer/GPSintegratednavigationaidedwithtwoantennaeheadingmeasurementforlandvehicleapplication[C]// 25thChineseControlandDecisionConference(CCDC), 2013: 4521-4526.
[8]ZhuJ,GaoJ,LiK,etal.Mapbuildingforindoortrackedautonomousmobilerobotwithlaserrangefinderandelectroniccompass[C]//ICCSIT2011, 2011: 245-254.
[9]SeoJ,LeeHK,LeeJG,etal.LeverarmcompensationforGPS/INS/Odometerintegratedsystem[J].InternationalJournalofControl,AutomationandSystems, 2006, 4(2):247-254.
[10]HemerlyEM,SchadVR.ImplementationofaGPS/INS/Odometernavigationsystems[C]//ABCMSymposiumSeriesinMechatronics, 2008, 3:519-524.
[11]IlyasM,ZhangR,QianQS,etal.PerformanceanalysisofmediumaccuracyFOG-basedIMUintegratedwithopticalodometerforlandvehiclenavigation[J].AppliedMechanicsandMaterials, 2012, 245:334-339.
[12]XuC,GaoJ,WangJ.RobustKalmanfilteringofGNSS/INSintegratedsystem[J].JournalofChinaUniversityofMining&Technology, 2010, 39(5):773-778.
Research on Integrated Navigation of LIMU and Odometer with Large Angle
LI Dan, LIU Ming, HU Hua-feng, LUO Wei
(The General Design Institute of Hubei Aerospace Technology Academy, Wuhan 430040, China)
The relationship between IMU coordinate system and odometer coordinate system is established when large angel is posed due to their installation strategy. Mathematical model is chosen to acquire navigation parameters of odometer from its pulse, and the formula of large angle is put forward. Process equation and measure equation are acquired based on displacements of IMU and odometer by Kalman-filter, field test is carried out to validate the method and the results turn out to be effectual.
Odometer; Large angle; Installation error; Integrated navigation
10.19306/j.cnki.2095-8110.2016.06.004
2015-06-10;
2015-08-29。
李旦(1985 - ),男,工程师,主要从事惯性导航及组合导航方面的研究。E-mail:329364231@qq.com
V249.3
A
2095-8110(2016)06-0017-04
