一种基于载波移相调制的模块化多电平换流器冗余策略
2018-12-20徐东旭刘崇茹王洁聪凌博文
徐东旭,刘崇茹,郑 伟,王洁聪,凌博文,钱 康
(1.新能源电力系统国家重点实验室(华北电力大学),北京 102206;2. 国网甘肃省电力公司电力科学研究院,甘肃兰州 730070)
0 引 言
模块化多电平换流器(modular multilevel converter, MMC)是电压源型换流器的研究热点之一[1-3]。由于采用级联式结构,使其具有输出电平数可调、易拓展、谐波少等优点而得到广泛应用,目前应用范围最广的子模块为半桥子模块(half bridge sub-module, HBSM)[4-5]。
在实际工程中,为了防止MMC子模块故障而导致系统停运,通常在每个桥臂中配置一定数量的冗余子模块,以使子模块故障时系统仍能维持正常运行[6-7]。在最近电平逼近调制(nearest level modulation, NLM)下,所有子模块均处于带电压状态,根据电容电压的大小与桥臂电流来筛选处于投入运行状态的子模块,使得所有子模块电容电压均维持在额定值附近[8-9],处理比较方便。而对于载波移相调制(carrier phase shift sinusoidal pulse width modulation, CPS-SPWM),由于载波与各个子模块一一对应,因此对冗余的处理要复杂的多。
文献[10-11]提出将部分冗余的子模块维持在热备用状态,当发生子模块故障时,热备用状态的子模块优先替换故障子模块,冷备用子模块转热备用子模块。文献[12]提出了一种基于桥臂能量平衡的冗余容错控制策略,可以有效抑制子模块故障时直流电流的波动,但并未涉及冗余模块的控制策略。文献[13-14]提出了基于载波移相调制的冗余保护策略,但其需要不断地为冗余子模块充电,冗余子模块利用率低,且对于系统的稳定运行有一定影响。
同时,由于MMC系统含有冗余子模块,在系统启动预充电的过程中,会出现子模块电容电压充不到额定值的情况。文献[15]将MMC充电过程分为不控充电与解锁充电两个阶段,分别通过闭锁与控制系统建立额定直流侧电压。文献[16]探索了直流侧主动充电策略的可行性。
本文提出了适用于载波移相调制方式的带电压热冗余控制策略。在子模块发生故障退出运行时,几乎不对系统造成影响。同时,针对含有冗余子模块的MMC系统启动预充电提出了一种分组充电策略,降低了控制系统复杂度。在PSCAD/EMTDC中搭建了9电平和101电平双端模型验证了所提出热冗余策略在子模块故障时的有效性与优越性。
1 HBSM结构与CPS-SPWM原理
1.1 HBSM结构
半桥结构的子模块HBSM的结构如图1所示。

图1 HBSM结构Fig.1 Structure of HBSM
图中Usm为子模块端电压,K为其旁路开关,用以故障时旁路子模块。T为旁路晶闸管,用以故障时提供故障电流通路,保护二极管。T1、T2为IGBT,由控制信号控制,当控制信号为1时,IGBT导通;当控制信号为0时,IGBT关断。D1、D2为反并联二极管,R为均压电阻,C为子模块电容。
1.2 CPS-SPWM调制原理
CPS-SPWM跟踪调制波性能好,实现计算量少,在低电平或是对计算量有限制的场合应用较多。其具体实现原理为:不考虑冗余,假设每个桥臂子模块数量为N,在0至2π均匀分配N个载波,每个载波对应一个子模块。通过调制波与每个载波的比较得到每个子模块的控制信号。当调制波大于载波时,其控制信号为1,当调制波小于载波时,其控制信号为0。调制波形见图2。

图2 CPS-SPWM调制原理Fig.2 CPS-SPWM operating principle
2 热冗余控制策略
为了实现正常运行状态下,每个子模块都能够投入运行,对于正常子模块,其旁路开关K断开,TI、T2由控制信号控制;对于故障子模块,旁路开关K闭合,且T1、T2均关断,子模块被切除。
为了使桥臂所有正常运行的子模块电容电压维持在额定值附近,本文借鉴NLM调制方式下对冗余模块的处理,设计了CPS调制方式下的热冗余策略:在一定时间间隔,按一定的轮换顺序选择处于运行状态的子模块;将处于运行状态的子模块电容电压输入控制器,同时将控制器输出的控制信号赋值给处于运行状态的子模块;将桥臂中其他正常子模块的控制信号赋0值,使其处于热冗余状态。
假设N+1电平的MMC系统的每个桥臂子模块总数量为L,故障子模块Z个,在每个时刻,将L-Z个子模块按顺序编号:每次选择N个输入。为了尽可能减小计算量,选择的规则为:1至N;2至N+1;3至N+2;……;L-Z至N-1,如图3所示。

图3 子模块选择效果Fig.3 Submodule selection effect
为了实现图3中所示的子模块选择效果,设计了热冗余策略。该策略的总体流程如图4所示。
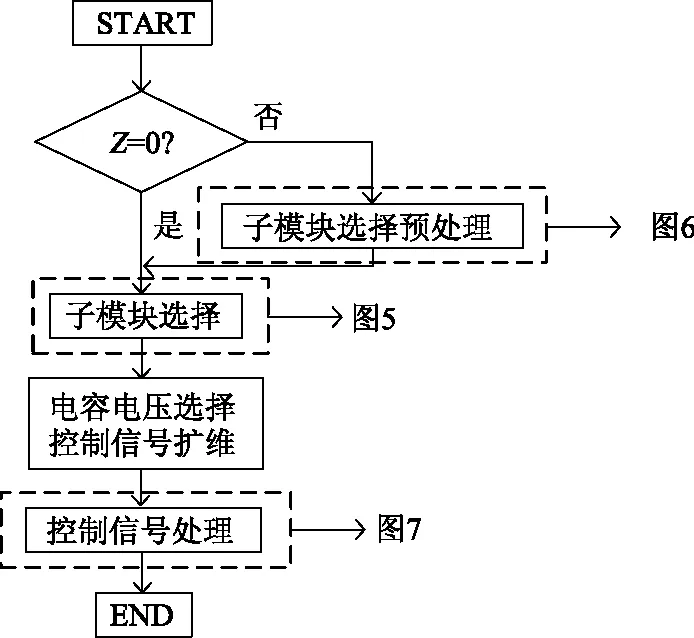
图4 热冗余步骤Fig.4 Thermal redundant step
由图4可看出,该逻辑主要分为3个部分,分别为子模块选择、子模块选择预处理、控制信号处理。首先,判断桥臂是否含有故障子模块,无故障子模块时(Z=0),直接进入子模块选择逻辑,按要求选择N个子模块,使其处于运行状态;若含有故障子模块(Z≠0),则需要对子模块进行预处理后再进行子模块选择。然后根据所选择的子模块,记录其电容电压输入控制器。同时进行控制信号扩维,进而进行控制信号处理,使得控制信号与总的子模块数L一一对应。其详细过程在本节剩余部分进行了详细阐述。
2.1 子模块选择
子模块选择的具体逻辑如图5所示。

图5 子模块选择逻辑Fig.5 Submodule selection logic
图中ΔT为时间间隔;TS为累计时间间隔;p为处于运行状态的子模块在所有子模块中的编号;p0为p的初始序号;t为运行时刻;Δt为运行步长;j为投入运行的N个子模块的编号;Q=[Q1,Q2,…,QL-Z]为每个桥臂所有子模块数组;O=[O1,O2,…,ON]为处于运行状态的子模块数组。
处于运行状态的子模块选择逻辑按t是否小于TS分为两部分:
① 当t小于TS时,说明此时刻不需要重新选择处于正常运行的子模块,按上一时刻的序号进行子模块选择,令p=p0,j=1,进入选择逻辑,判断j是否小于等于N,若j小于等于N,则表示处于正常运行状态的子模块选择仍未结束,进一步判断p是否小于等于L-Z,若p小于等于L-Z,则表示所选择的运行状态的子模块序号未超出正常子模块序号,令Oj=Qp,p=p+1,j=j+1。若p大于L-Z,则表示所选择的运行状态的子模块序号已超出了正常子模块序号,需要减去L-Z,重新从第1个子模块开始赋值,令g=p-L+Z,Oj=Qg,p=p+1,j=j+1。继续判断j是否小于等于N,若j大于N,则表示此时刻处于正常运行状态的子模块选择已结束,令t=t+Δt,并继续判断t是否大于TS。
② 当t大于TS时,说明需要重新选择处于运行状态的子模块。为了能从上一时刻所选择的运行状态的子模块序号的后一个序号开始选择,令p0=p0+1,并判断p0是否小于等于L-Z。若p0小于等于L-Z,则表示p0仍在正常子模块序号内,进一步令p=p0,j=1,且,令TS=TS+△T,从而进入运行状态子模块选择逻辑;若p0大于L-Z,则表示上一时刻运行状态子模块初始序号已为最后一个子模块,运行状态子模块的选择需要重新从第1个编号开始,所以令p0=1,之后继续执行p0小于等于L-Z的逻辑,从而进入运行状态子模块的选择逻辑。
2.2 子模块选择预处理
当子模块发生故障后(Z通常为1),将其闭锁,并闭合旁路开关,隔离故障子模块。同时,子模块选取逻辑应在剔除故障子模块的基础上进行。所以,本文所提出的热冗余策略当含有故障子模块的情况下,在子模块选择逻辑前设计了子模块预处理逻辑,如图6所示。
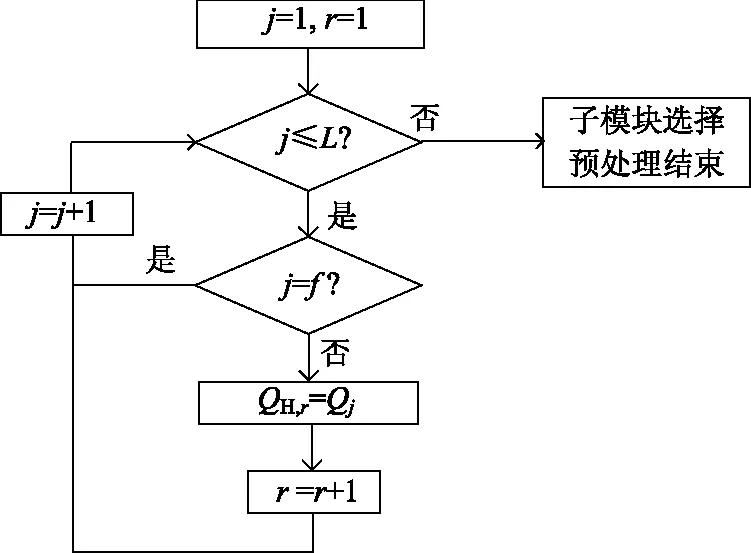
图6 子模块预处理逻辑Fig.6 Submodule preprocessing logic
其中,j为故障前子模块编号,r为剔除故障子模块之后的子模块编号,f为故障子模块序号,QH=[QH,1,QH,2,…,QH,L-Z]为剔除故障子模块数组。
子模块选择预处理逻辑为:当发生子模块故障时,令j=1,r=1,判断j是否小于等于L,若j小于等于L,则表示此时对于子模块选择的预处理未结束,进一步判断j是否等于f,若j不等于f,则表示编号为j所对应的子模块未发生故障,令QH,r=Qj,r=r+1,同时令j=j+1,继续判断j是否小于L。若j等于f,则表示编号为j所对应的子模块发生故障,跳过此故障子模块,直接令j=j+1,继续判断j是否小于L。若j大于L,则表示子模块选择预处理结束,跳出子模块选择预处理逻辑。
在选择运行状态子模块的同时记录其电容电压,并将其输入控制器。
2.3 控制信号处理
当桥臂中不存在故障子模块时(Z=0),对于控制器,由于其输出的控制信号为N维,为了给冗余子模块赋控制信号,需要将控制器输出的N维扩展成L维。扩展规则为:将控制器输出的控制信号依次赋值给所选取的处于运行状态的子模块,冗余子模块则赋0控制信号。设此时所形成的控制信号数组为OS=[OS,1,OS,2,…,OS,L]。
当桥臂中含有故障子模块时(Z≠0),对于控制信号,由于经过子模块选择预处理后的子模块总数为L-Z,因此在进行子模块控制信号的扩维时,实际上是在剔除故障子模块的基础上进行的。为了能够使得控制信号与子模块一一对应,需要对已进行扩维的控制信号进一步处理。其处理逻辑如图7所示。

图7 控制信号处理逻辑Fig.7 Control signal processing logic
其中,OSH=[OSH,1,OSH,2,…,OSH,L]为控制信号处理后的控制信号数组,f为故障子模块序号。
由图7可得,在控制信号处理过程,当系统未发生子模块故障时,控制信号处理前后相同;当系统发生子模块故障后,控制信号处理将故障子模块控制信号赋0,同时,将L-Z维控制信号进一步扩维为L维,与总子模块数一一对应。
需要注意的是,子模块预处理后的子模块数组QH=[QH,1,QH,2,…,QH,L-Z]相当于图7中子模块选择中的Q=[Q1,Q2,…,QL-Z],预处理后需要进行子模块选择。而控制信号处理后的控制信号数组OSH=[OSH,1,OSH,2,,OSH,L]则直接赋给对应子模块。
3 闭锁预充电策略
由于MMC配置冗余后,每个桥臂含有多余的冗余子模块,其子模块电容电压在闭锁充电的情况下所能达到的值较不含有冗余模块时要更低。MMC闭锁充电等效电路如图8所示。
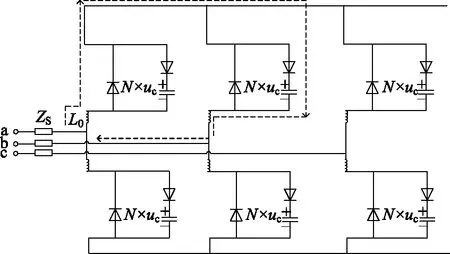
图8 MMC闭锁充电等效电路Fig.8 MMC blocking charge equivalent circuit
以AB相为例,当UAB为正时,其子模块充电回路如图8中虚线所示。闭锁充电电容电压能够达到的稳定值为
(1)
式中:uabm为交流侧线电压幅值;L为每个桥臂总子模块数目,由于调制比
(2)
式中:uxm为交流侧相电压幅值,x可取a, b, c;udc为直流侧电压。
联立式(1)、(2)可得
(3)
而子模块电容电压的额定值为
(4)
由于通常情况下m<1,且由于冗余子模块的存在,导致uc_1≪ucref。为了使得在启动预充电阶段,电容电压能够达到正常运行时的额定值。需要对闭锁充电的子模块数量进行控制。假设当闭锁充电的子模块数量为v时,子模块电容电压能够达到额定值。则v满足
(5)
联立公式(2),且由于v为整数,可得
(6)
为了使得能够有效地充至额定值,floor为不大于其的最大整数函数。
所以分组充电每阶段投入的子模块应不大于v,其具体执行流程如下:
① 将每个桥臂所有子模块进行编号,分别为1至L。子模块旁路开关处于打开状态,此时可通过控制IGBT的通断,使得子模块处于投入或者切除状态。当进行第一组闭锁充电时,取n=0;
② 使编号为n×v+1至(n+1)×v的子模块处于投入状态,剩余子模块处于切除状态;
③ 判断每个桥臂编号为n×v+1至(n+1)×v的子模块电容电压是否达到额定值,若未达到,则继续维持在步骤②状态;若已达到,则使编号为n×v+1至(n+1)×v的子模块处于切除状态;
④n=n+1,判断L-(n+1)×v是否大于v,若大于等于,则使编号为n×v+1至(n+1) ×v的子模块处于投入状态,并继续执行步骤②、③;若小于,则使得编号为n×v+1至L的子模块处于投入状态,并执行步骤⑤;
⑤ 判断每个桥臂编号为n×v+1至L的子模块电容电压是否达到额定值,若未达到,则保持其处于投入状态;若已达到,则闭锁所有子模块,预充电过程结束。
4 仿真验证
4.1 双端9电平仿真系统
为了验证本文所提出热冗余策略与分组闭锁预充电的效果,本文在PSCAD/EMTDC中搭建了MMC双端9电平模型,如图9所示,其中冗余子模块数为2。
图中:Us为交流电源,其线电压有效值uab=10kV;ZS为交流侧等效阻抗,其值为0.341 2+j0.314Ω;桥臂电感L0=0.04H;直流侧阻抗Zd由Rd与Ld组成,Rd=0.15Ω,Ld=0.025H,直流侧对地电容Cd=24.9μF。其第一端采用P~Q控制,第二端采用Udc~Q控制,控制目标P1=5MW,Q1=Q2=2Mvar,Udc=17kV。且其中第一端应用所提出热冗余策略与分组预充电策略,第二端维持传统的控制策略。

图9 双端MMC模型Fig.9 Two ended MMC model
设置3s后桥臂第7个子模块发生子模块电容击穿故障,控制系统延迟0.05s检测到故障,切除故障子模块,投入冗余子模块。
传统CPS-SPWM调制方式下的电容电压波形如图10所示。

图10 传统CPS-SPWM电容电压Fig.10 Capacitor voltage of traditional CPS-SPWM
由图10可得,对于正常运行子模块,当发生子模块故障时,在故障被检测前,由于此时相当于桥臂缺少一个子模块,因此处于正常运行的子模块电容电压呈现上升的趋势,以弥补子模块故障所造成的电压缺失。当故障被检测,切除故障子模块并投入冗余子模块时,由于初始冗余子模块电容电压过低,因此正常运行子模块电容电压会呈现继续上升趋势;随着冗余子模块电容电压达到额定值,正常子模块的电容电压随之恢复稳定。
对于冗余子模块,由于故障检测前,其一直处于切除状态,所以电容电压为0。当故障检测后,其投入运行时,其电容电压在控制器的作用下不断升高到额定值。由图10可看出,其升高的过程中存在充放电,这导致其达到稳定值所需要的时间过长,本文测试结果需要0.7s左右。
运用本文所提出热冗余策略下的电容电压如图11所示。

图11 热冗余策略电容电压Fig.11 Capacitor voltage of thermal redundancy strategy
由图11可看出,在正常运行状态下,所有子模块电容电压都保持在额定值附近,且电容电压在波动与维持恒定值之间不断交替,这是因为当所对应子模块处于热冗余状态时,由于其处于切除状态,电容电压维持不变;而当所对应子模块处于正常运行状态时,则在控制器的作用下,电容电压呈现一定的波动。
当子模块发生故障后,在故障检测前,正常运行子模块电容电压呈现升高趋势,与传统策略类似。当故障检测后,故障子模块被切除,热冗余策略在剔除故障子模块的基础上进行。由于此时正常运行子模块略高于额定值,因此,控制器只需将其恢复到额定值即可。由图11可看出,电容电压恢复稳定所需的时间远小于传统冗余策略,本文测试结果仅需0.2s左右。
4.2 时间间隔比与步长的影响
4.2.1 时间间隔比的影响
通过热冗余的流程可得,热冗余策略的实际过程是按一定的时间间隔,改变处于投入状态的子模块。对于控制器,改变的是其输入的电容电压。由于控制器中含有大量的PI环节,当输入发生变化时,若仍在稳定极限内,则闭环控制器会在一定的波动后重新达到稳定值。
由于实际工程中,系统控制效果与采样周期、控制周期的选择有关,本文定义时间间隔比为:时间间隔比=时间间隔/控制周期。
本文在仿真步长为50μs的条件下,即系统采样周期与控制周期为50μs的条件下,通过改变时间间隔比,分析不同时间间隔比对于系统稳定性的影响,结果见表1。

表1 时间间隔比的影响分析
由上表中可看出,当时间间隔比过小时,由于在每个时间间隔内,控制器无法达到稳定,从而导致了系统稳定性较差。且由于需要频繁地进行子模块选择,子模块的开关次数随着时间间隔比的减小,呈增大趋势;随着时间间隔比的增大,系统稳定性与开关频率逐渐逼近无冗余时的情况。具体对于本系统来说,当时间间隔比大于200时,系统稳定性良好。但是过大的时间间隔比,又会造成热冗余效果的降低。所以,在工程中,结合采样频率与控制频率,确定合适的时间间隔比至关重要。
4.2.2 仿真步长的影响
为了探讨热冗余策略对于不同步长仿真的影响,本文在常用仿真步长下测试了热冗余策略,得到结果如表2所示。
由表2可看出,在常用仿真步长的情况下,热冗余策略对于系统稳定性无明显影响。不同电平下特性相似。说明所提出的热冗余策略适应于不同步

表2 仿真步长影响分析
长的仿真,适用性强。
4.3 硬件平台测试结果
为了进一步验证所提出热冗余策略的有效性,本文建立了101电平单端系统半实物仿真模型。利用RTDS中rtds_vsc_FPGA_U5组件建立MMC的一次系统,其中其交流系统在RTDS PB5/GPC板卡中运行,MMC仿真单元在RTDS FPGA中运行。控制器系统基于TI公司KeyStone架构的8核数字信号处理器(DSP)[17]。如图12所示。

图12 DSP控制器Fig.12 DSP controller
该系统与图9中系统整流侧类似,不同之处在于此系统为101电平,子模块电容为30mF,交流侧线电压有效值为110kV,P~Q控制的目标为P=420MW,Q=50Mvar,直流侧采用中间接地的双直流电源,每个直流电压源的电压值为100kV。
假设第二个子模块发生IGBT拒动故障,当故障发生时,IGBT始终处于闭锁状态,0.05s后控制系统检测到故障并动作。

图13 热冗余策略实验结果Fig.13 Experimental results of thermal redundancy strategy
由图13可看出,当子模块发生故障时,切除故障子模块,热冗余策略能够维持电容电压及系统的稳定性。
4.4 分组闭锁预充电效果
在9电平系统中应用分组预充电,由4.1中9电平系统参数可得,当应用所提出分组充电策略时,每次投入充电的子模块数应不大于6。所以,其充电过程总共分为两组,仿真结果如图14所示。
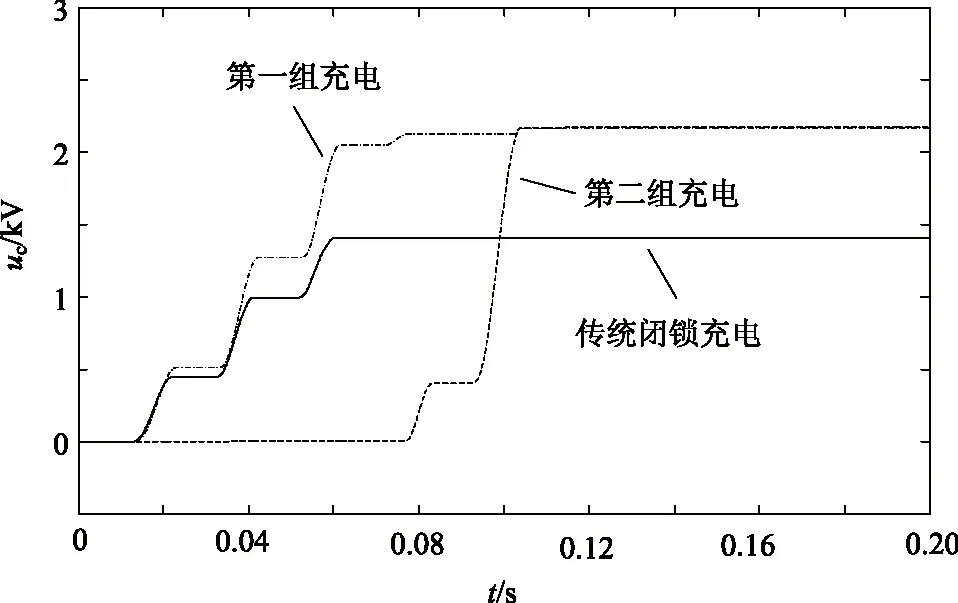
图14 分组预充电策略结果Fig.14 Packet pre-charge strategy results
由图14可看出,与传统闭锁充电策略相比,所提出的分组预充电策略能够有效地将电容电压充至额定值。
5 结 论
本文提出了一种基于CPS-SPWM的热冗余策略,运用该策略,可以有效减少子模块故障时对系统稳定性所造成的影响,并且大大提高了冗余子模块的利用率。针对冗余情况下MMC预充电,本文提出了一种分组预充电策略,可以使得在含有冗余子模块的情况下,将所有子模块电容电压充至额定值,有效减少了MMC启动时的预充电复杂度。通过仿真及实验结果验证了所提出策略的有效性。
但同时也应意识到,本文所提出的热冗余策略增加了原CPS-SPWM算法的复杂性,在一定程度上增加了对于计算资源的需求;同时,热冗余策略在正常运行的状态下将所有子模块都投入运行,增加了开关损耗。
因此在实际使用中,增加计算资源,以及结合实际工程需求设定合理的时间间隔是热冗余使用的关键。