大动态光纤陀螺标度因数双线性插值补偿模型
2018-08-27姚俊杰陈杏藩王金芳
姚俊杰,王 磊,陈杏藩,王金芳,刘 承
(1. 浙江大学 光电科学与工程学院,杭州 310027;2. 上海航天控制技术研究所,上海 201100)
光纤陀螺是一种重要的角速度传感器[1],在航空、航天、航海等军用领域和地质、石油勘探等民用领域具有广阔的应用前景[2]。对于高速旋转的导航系统,如旋转导弹、火箭弹的旋转速度高达1500 r/min[3],常规陀螺仪无法同时满足测量范围和测量精度的要求。近年来快速发展的大动态光纤陀螺技术具有测量范围大、精度高等优点,是解决高速旋转角度测量和图像解耦的有效手段之一。
标度因数误差是表征大动态光纤陀螺动态特性的重要参数之一[3],其误差大小直接影响光纤陀螺的动态精度。但是,受光纤环、光源等光电器件的影响,标度因数会随温度变化而发生改变[4]。对于大动态光纤陀螺,工作在高阶条纹区间时,除了干涉条纹的对比度存在明显的下降之外,光源光谱的非对称会破坏干涉条纹的周期性,使标度因数的非线性误差进一步恶化,影响陀螺的输出精度[1]。在航空、航天等对动态精度要求较高的应用场合,需要对标度因数的温度特性和非线性误差进行补偿。
关于标度因数误差建模补偿方面的研究,前人做了大量的工作。文献[3]采用多项式拟合的方法对标度因数的温度特性和非线性进行补偿,在曲线具有多项式特征的情况时,多项式模型的补偿精度高,但对测试误差敏感,稳定性较差。文献[5]提出并分析了光纤陀螺温度与标度因数模型的迟滞现象,提升标度因数模型的补偿效果,但未对标度因数的非线性进行补偿。文献[6]提出了基于多模型分段拟合的光纤陀螺温度误差补偿方法。文献[7-10]提出了多种基于神经网络算法的标度因数温度补偿模型,得到了优于5´10-6的补偿精度,补偿精度较高,但这些方法需要大量的预先学习,并在使用时不断更新模型,运算量大,实时性有待提高。大动态光纤陀螺的速率范围大,一般超过了104(°)/s,模型样本点多且规律性较差,尚未报道有合适的补偿建模方法。
本文提出一种基于双线性插值的补偿模型,对温度、角速率双参量进行线性插值。标度因数误差从补偿前超过 1.3´10-3降低到小于 5´10-6,标度因数精度提升了两个数量级,验证了补偿模型的有效性。所采用的算法复杂度低,补偿精度高,易于工程实现。
1 大动态光纤陀螺标度因数误差分析
大动态光纤陀螺基于数字闭环光纤陀螺技术,数字闭环光纤陀螺的结构如图1所示。利用旋转引起的Sagnac相移信号作为误差信号反馈回系统,数字处理单元接收到误差信号,通过D/A、相位调制器这条反馈通道产生一个附加的反馈相位将干涉仪固有的正弦响应转换线性响应[1],降低光纤陀螺标度因数在整个动态范围内的误差。
在数字闭环光纤陀螺中,干涉信号强度为:



大动态光纤陀螺根据闭环反馈控制,使总相位被伺服控制在零附近,如式(4)(5)所示:
式中:n为所处的条纹级数,与产生的Sagnac相位相关。

光纤陀螺所用光纤环的长度及平均直径会随温度改变而发生变化。光纤环几何参数的温度变化系数约在10-5/℃,且变化是线性的[11]。在温度范围(−40℃~ +60℃)内,引起的标度因数变化达到了10-3。
典型光纤陀螺所用的SLD光源波长的温度漂移为10-4/℃[13-14],对光源采用控温可以有效提高波长稳定性,将光源波长的温度系数减小到了1.7´10-6/℃左右。在−40℃~+60℃温度范围内引起的标度因数变化减小到 1.7´10-4。
大动态光纤陀螺跨条纹检测,宽谱光源的特征也会影响标度因数的非线性。工作在高阶条纹区间时,除了干涉条纹的对比度存在明显的下降以外,光源光谱的非对称会破坏干涉条纹的周期性,干涉响应发生变化,带来了使标度因数非线性这一新特征。不同输入角速率下,陀螺输出存在变化为引起的光纤陀螺的标度因数相对误差为[15]:

采用典型的超辐射发光二极管(Super Luminescent Diode, SLD)光源时,光源由于非对称导致的光纤陀螺标度因数的变化如图2所示。在0~104(°)/s的输入角速率区间内,标度因数变化变化超过6´10-5。
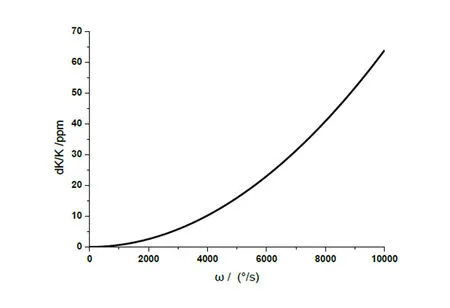
图2 标度因数与输入角速率关系Fig.2 Relationship between scale factor and input angular velocity
2 双线性插值补偿模型
根据第1节的误差理论分析可知,大动态光纤标度因数误差主要由环境温度和输入角速率两个因素影响。将标度因数K表示为:

首先利用图3中点1和点3的标度因数数据进行温度插值得到点a的标度因数,利用点2和点4的标度因数数据进行温度插值得到点c的标度因数,然后利用点a和点c的数据进行角速度插值得到点b的标度因数。计算过程如下:
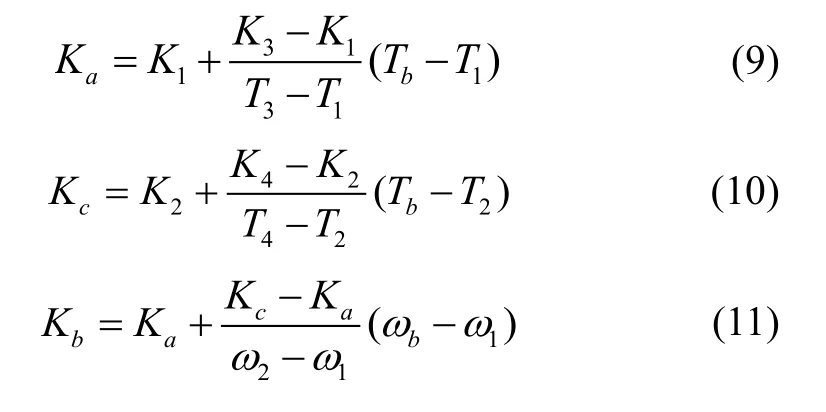
根据双线性插值算法对其余未知标度因数点进行计算,得到大动态光纤陀螺的标度因数补偿模型。
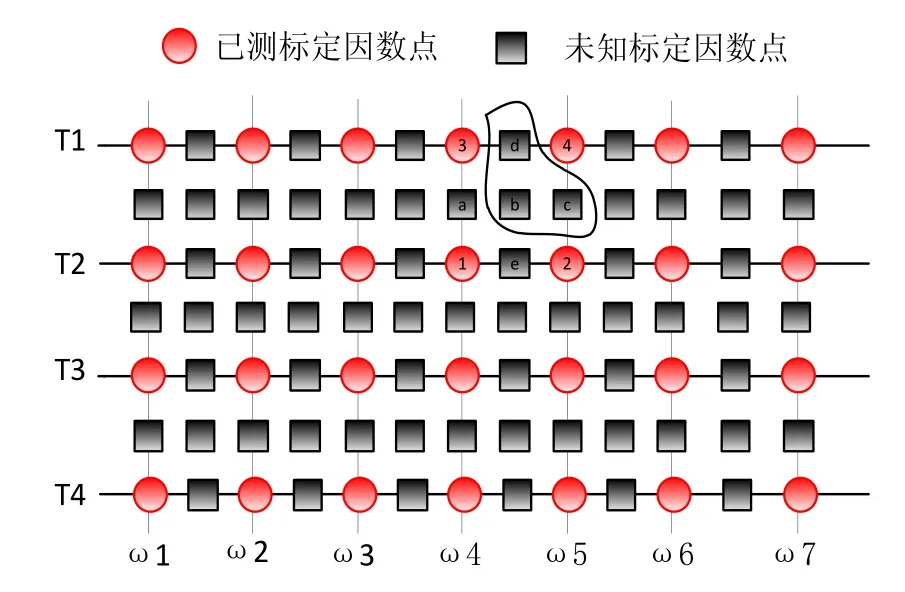
图3 标度因数网格示意图Fig.3 Grid chart of scale factor
3 大动态光纤陀螺标度因数补偿实验
利用转台高精度的角位置基准搭建定角测试系统,对大动态光纤陀螺标度因数进行标定。对得到的模型样本点进行双线性插值,计算得到大动态光纤陀螺的标度因数补偿模型。模拟实际应用环境,对所建立的大动态光纤陀螺标度因数双线性插值补偿模型的有效性进行验证。实验所用的 ZDH型大动态光纤陀螺[15]的速率范围为±1.44´104(°)/s,零偏不稳定性为0.5 (°)/h,标度因数的重复性指标优于 5´10-6。根据实际应用需求,对温度范围−40℃~+60℃、角速率范围0~7200 (°)/s条件下大动态光纤陀螺的标定因数进行标定实验,并建立补偿模型。
3.1 样本点的获取与建模
本文采用定角测试系统,利用转台角位置为基准进行大动态光纤陀螺标度因数标定,测试系统的结构框图如图4所示。采用FPGA同步采集光纤陀螺输出数字量和高精度温控转台输出的角度脉冲,通过转台角位置信息获得陀螺转过的实际角度高精度计时器得到经历的旋转时间使用陀螺累积输出数字量除以平均角速率得到陀螺在该温度、速率点下的标度因数
高的标定精度有助于减少建模误差。实验所采用的高精度温控转台的角位置定位精度为±3²,转台的角位置精度达到4.6´10-6/圈,角位置定位精度与转台转过的角度无关。转台转动5圈以上时,位置误差小于1´10-6。
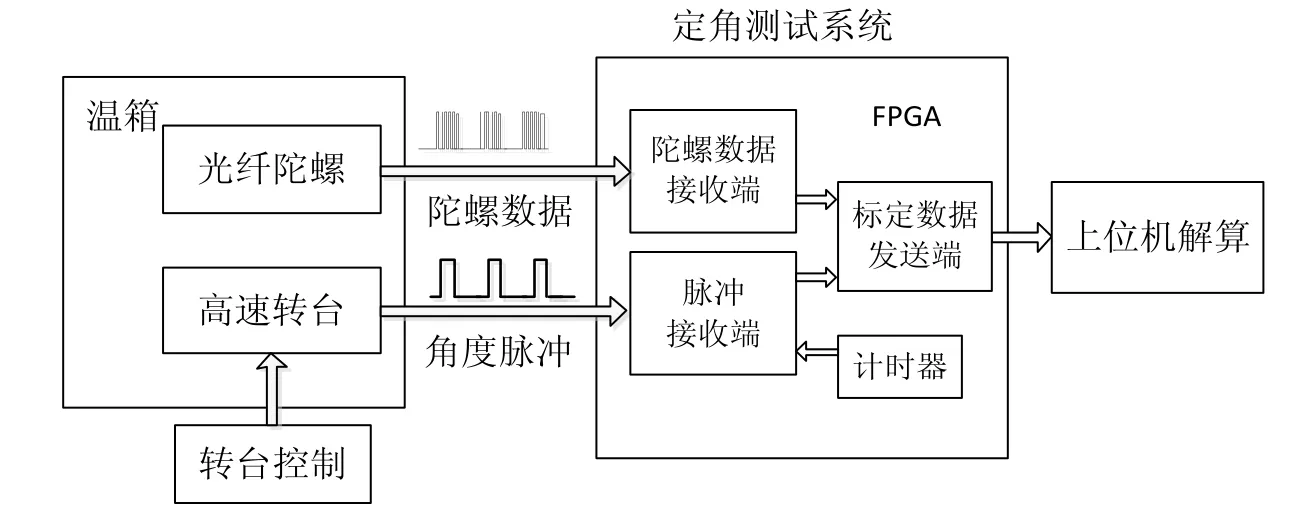
图4 标度因数标定实验模块框图Fig.4 Function block diagram of scale factor calibration

式中,d为插值间隔。
根据二阶连续导数的大小,选取样本点的间隔,分别对温度、角速率双参量进行线性插值,计算得到三维网格图,如图5所示。该网格图包含了温度范围−40℃~+60℃、角速率范围0~7200 (°)/s条件下大动态光纤陀螺的标度因数数值,网格的交叉点代表了实测样本点数据,其余数据点均由双线性插值算法获得。温度引起的标度因数的变化超过了1.3´10-3,输入角速率引起的标度因数非线性误差达到了6´10-5左右。
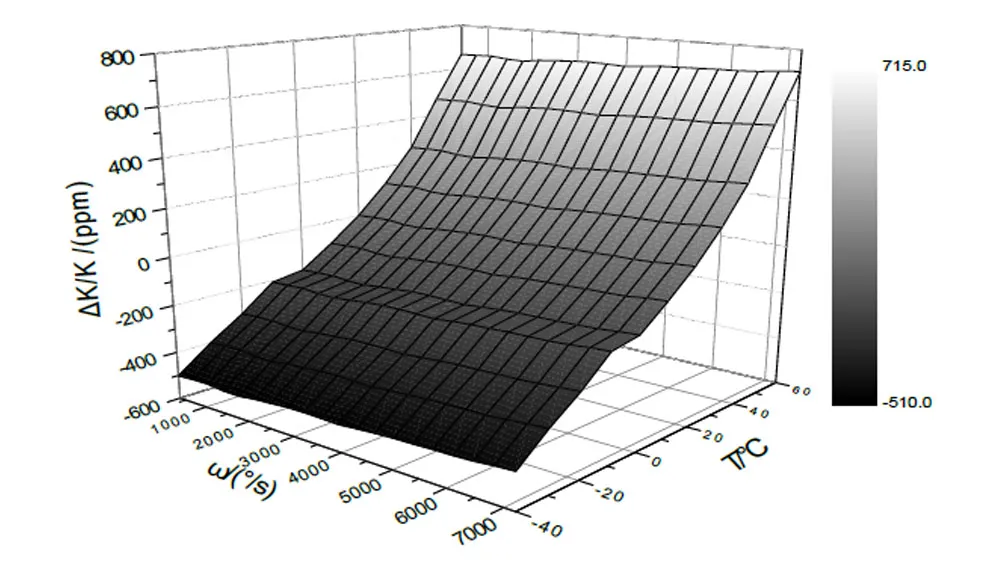
图5 标度因数综合模型三维网格图Fig.5 There-dimensional grid map of scale factor integrated model
3.2 模型验证
模拟实际应用环境,分别进行定角速率实验和变角速率实验。选取样本点以外的温度点、角速率点进行模型验证。补偿模型的评测系统如图6所示。以转台输出的绝对角度为基准,转台定位精度为± 3²,测量陀螺累积输出角度与转台绝对角度输出的偏差,计算得到标度因数补偿模型的误差,综合评估模型的有效性。
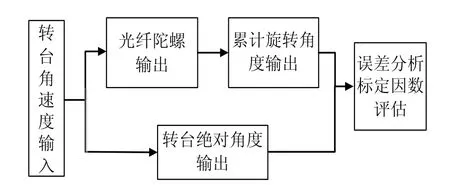
图6 标度因数补偿效果验证实验模块框图Fig.6 Function block diagram of scale factor compensation experiment
3.2.1 定角速率实验
以一定的角速率间隔,设置角速率序列,进行不同角速率下的模型验证。该方法可以对大动态光纤陀螺的标度因数进行分立检验,获取不同角速率下补偿模型的性能。
选取−25℃、15℃、45℃三个非样本点的温度点下1080 (°)/s、3600 (°)/s、4320 (°)/s、5400 (°)/s、6480 (°)/s、7200 (°)/s这六个非样本点的角速率点进行定角速率实验,将转台的角度基准与陀螺解算得到的角度进行对比,得到陀螺累积输出角度偏差,将角度偏差除以转台的绝对角度输出,计算得到标度因数补偿模型的误差。对所建立的双线性插值补偿模型在固定角速率情况下的补偿效果进行验证,实验结果如图7所示。结果表明双线性插值补偿模型在定角速率情况下输出的角度偏差小于 5´10-6。
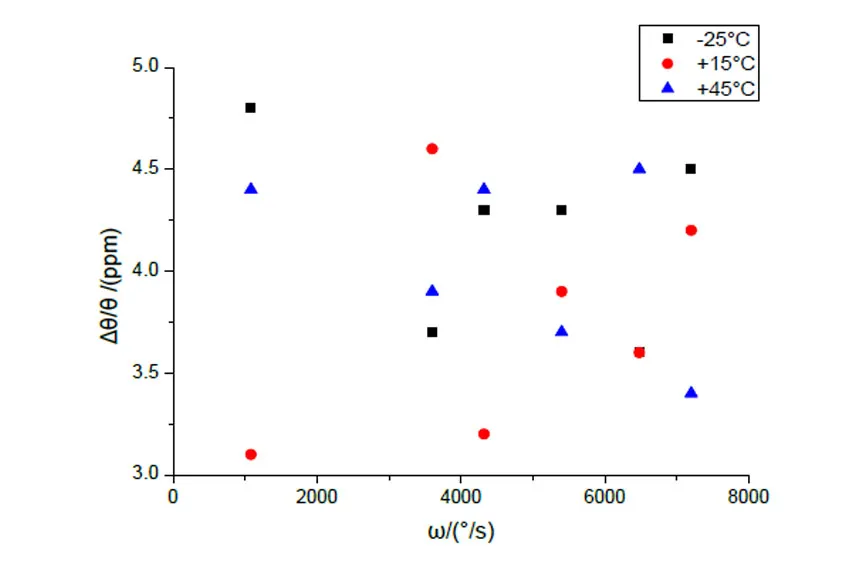
图7 定角速率实验结果Fig.7 Fixed-rate experimental results
3.2.2 角速率扫描实验
以角速率扫描的方式,对陀螺进行角速率范围为0~7200 (°)/s的测试,可以检验补偿模型的综合性能。相比定角速率测试,其更接近实际陀螺的实际应用。
选取−25℃、15℃、45℃三个非样本点的温度点进行角速率扫描测试,控制转台进行匀加速、匀减速转动(0~7200 (°)/s),模拟陀螺的实际应用情况。将转台的角度基准与陀螺解算得到的角度进行对比,对所建立的双线性插值补偿模型在变角速率下的补偿效果进行验证,测试结果如表1所示。结果表明双线性插值补偿模型在变角速率情况下输出的角度偏差小于5 ´10-6。
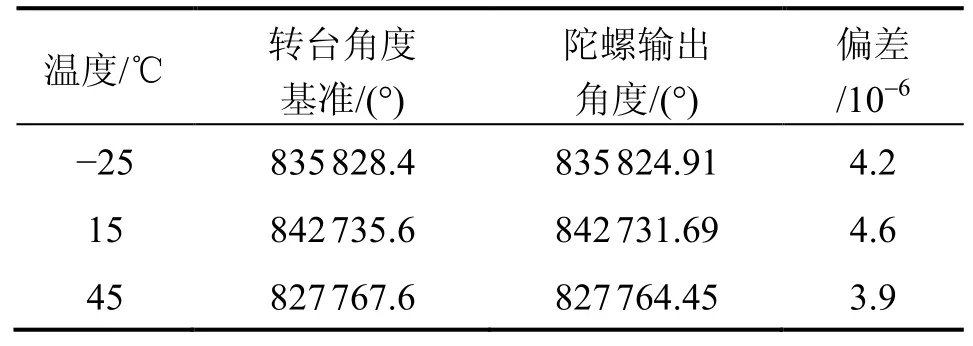
表1 角速率扫描实验结果Tab.1 Experimental results of angular velocity scanning
4 结 论
本文通过对大动态光纤陀螺标度因数的误差分析表明,标度因数误差主要受到环境温度和输入角速率大小影响。提出了一种基于双线性插值的补偿模型,对大动态光纤陀螺的标度因数的温度特性和非线性进行综合补偿,在温度范围−40℃~+60℃、角速率范围0~7200 (°)/s的条件下将标度因数误差从补偿前超过1.3´10-3降低到补偿后小于 5´10-6,标度因数精度提升了两个数量级,改善了大动态光纤陀螺的动态性能。该补偿算法复杂度低,易于工程实现。
