Ka频段低轨卫星跟踪方式研究
2018-02-13谢学东操礼长刘旺华朱志勇
谢学东,操礼长,刘旺华,朱志勇
(1.中国人民解放军61112部队,黑龙江 牡丹江157011; 2.西安卫星测控中心,陕西 西安 710043)
0 引言
随着遥感技术的不断发展,空间相机的分辨率不断提高,图像数据量也成倍增加,卫星需要利用有限的空间资源将数据下传至地面处理系统。目前,低轨卫星大部分通过X频段(8~9 GHz)传输遥感卫星数据至地面处理系统。根据国际电信联盟(ITU)规定,X频段的传输带宽一般不得超过250 MHz,数据传输速率不超过500 Mbps[1]。而Ka频段的传输带宽可达3.5 GHz,数据传输速率可达7.0 Gbps[2]。综合考虑应用需求,可以使用Ka频段传输高码速率的遥感数据解决遥感数据量大和传输时间短的矛盾[3]。目前,中继卫星数据的传输采用Ka频段传输,数据速率可达1 Gbps以上[4]。中继卫星飞行高度一般超过20 000 km,地面捕获跟踪角速度不高,常规的伺服机构和跟踪技术可以满足使用要求。而低轨卫星的高度一般为200~1 100 km,地面跟踪过顶角速度较高,并且Ka频段的波束宽度也偏低[5],同时多普勒效应对地面跟踪带来的影响也较大[6],为准确跟踪带来了较大的挑战。本文针对Ka频段低轨卫星过顶跟踪的高跟踪精度要求,提出跟踪环路的改进设计思路,并仿真验证了跟踪环路控制特性,为低轨Ka频段卫星跟踪控制提出关键改进思路。
1 Ka频段跟踪条件对比
1.1 跟踪精度要求
波束宽度是指天线辐射方向图中主瓣两半功率点间的夹角,定义为天线方向图的波瓣宽度,包含水平波束宽度和垂直波束宽度,一般与天线的结构、天线的口径和接收信号的波长有关[7]。当天线结构和馈源组装完毕,通常标定各个方向的特定频点的方向图,可以确定天线的波束宽度。工程中一般采用式(1)进行初略计算[8]:
(1)
式中,λ为接收信号的波长;D为接收天线的口径(直径)。可见,波束宽度与接收信号的波长成正比,与天线的口径成反比。一般天线跟踪精度为半功率波束宽度的1/10[9],则
(2)
当采用天线口径为12 m,接收信号频点为27 GHz时,由式(2)可得,Ka波段的跟踪精度要求为0.065°。
1.2 跟踪性能要求

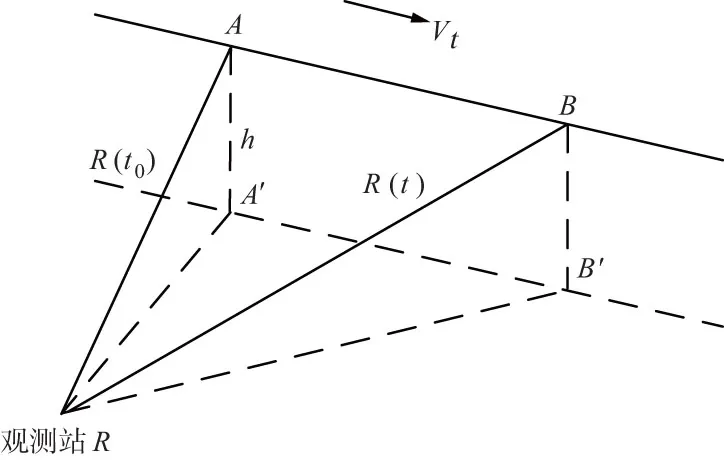
图1 卫星与观测点的关系
则

(3)
不同轨道高度卫星正过顶情况下对12 m三轴天线系统动态性能的预算不同。在Ka频段自跟踪时,如果只是采用传统的PID控制器控制策略[15],当卫星轨道高度为200 km时,动态滞后的误差为0.066°,无法满足系统的跟踪精度。为了达到高精度稳定可靠的跟踪,在传统控制策略的基础上必须采取相应的措施,提高跟踪环路的性能,实现Ka频段低轨卫星的稳定捕获跟踪。
2 跟踪环路研究
2.1 跟踪结构设计
天线伺服控制系统的控制通道或反馈通道一般采用模拟信号传输,其中放大器零点偏移、放大器零漂噪声、编码器噪声和跟踪接收机噪声等误差项超出跟踪精度要求标准,无法满足天线系统对高动态目标的可靠跟踪要求[16]。本方案选用高精度数字模块组合,模块之间的信息传递也采用数字传递。尽可能的降低由于模拟电路和模拟信号的传输带来的误差。数字控制系统结构框图如图2所示。
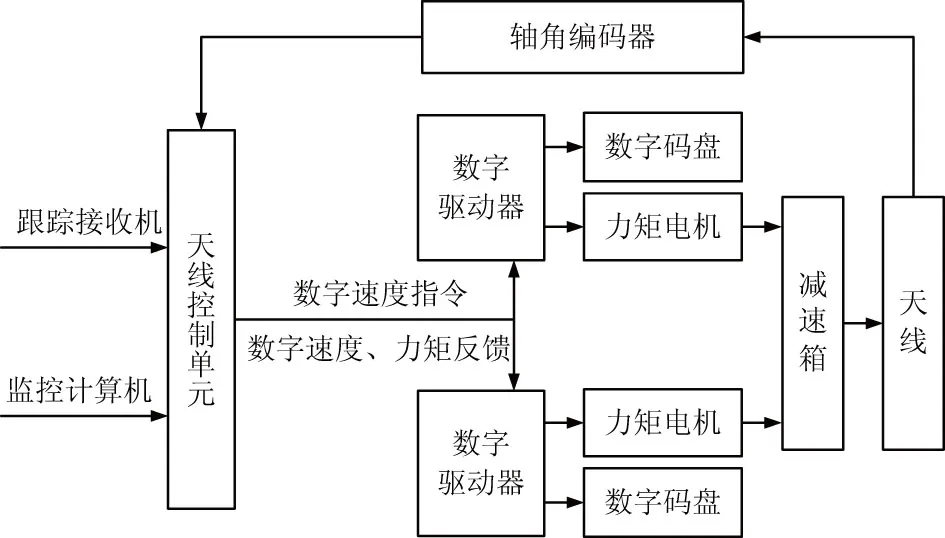
图2 数字控制系统结构
马达控制器选用高精度交流伺服驱动器,电机选用与之配套的数字反馈交流伺服力矩电机,特点是调速范围宽、精度高和低速性能好。交流伺服驱动器对外接口增加现场工业总线接口。通过这个接口实时控制送来的数字速度指令和伺服控制计算机时实传送电机速度、电流反馈信号。由于速度指令是以数字信号形式传递,交流伺服电机的宽调速范围受噪声影响降低,这样的调速系统可以实现前述的最小速度要求,最终为实现跟踪精度奠定必要的基础。驱动系统采用传统的多电机消隙技术进一步减小传动误差,其中力矩偏置、力矩均分和差速抑制等功能,在实时控制单元内计算完后送给数字驱动器。实时控制单元采用高速同步串口(SSI)[17],接收数字跟踪接收机送来的误差电压、信号强度指示,控制天线的电轴对准目标完成自动跟踪。机械轴位置编码选用旋转变压器,采用套轴式安装方式确保安装精度控制在允许范围内。编码结果以数字量的形式通过高速串行接口向控制计算机时实传输,可以有效地降低编码噪声。
2.2 跟踪环路设计
传统的位置环路控制器采用PID控制器进行环路控制,根据工程经验,在没有复合控制的前提下,一个12 m天线系统的加速度系数一般能达到10左右,对于工作在较低频率的天线系统来说能够满足使用要求。但是对于27~30 GHz频段的天线来说,加速度系数指标要求达20左右[18],目标过顶前后速度和加速度才能使天线精确对准目标。工程设计中可以使用如图3和图4所示的方法来实现天线复合控制。

图3 方位复合控制工程实现原理
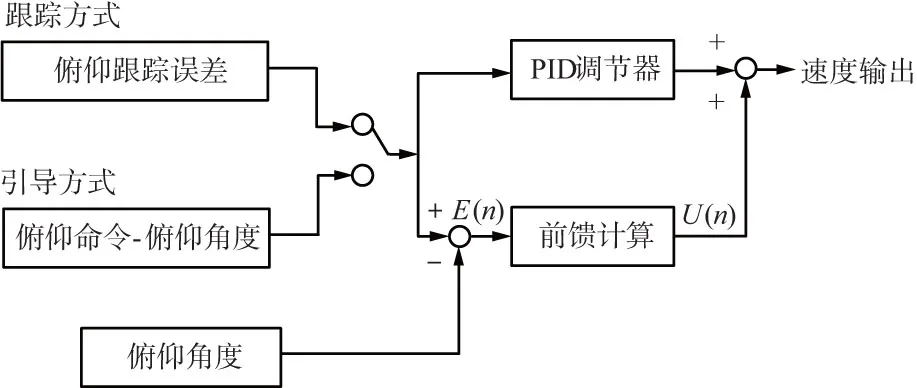
图4 俯仰复合控制工程实现原理
精确天线指向控制使用程序引导工作方式,前馈算法采用计算目标引导数据的速度分量,作为附加控制信号进行前馈校正,提高系统的误差度,使系统的跟踪精度得到极大提高。
采用目标前馈的位置复合控制,实际上是在PID控制器的环路之外,将目标位置进行微分处理,提取速度分量信息,对PID控制器进行二次校正,使PID控制器能够适应目标速度的变化,实现稳定、精确的指向控制。实验表明采用目标前馈复合控制算法后,系统的加速度常数K可提高10倍左右,理想情况下,12 m天线系统的等效加速度系数大于70,可以大大提高位置控制的精度。
2.3 变积分PID控制器设计
天线控制系统的响应时间和超调分量永远是矛盾的。采用复合的PID控制器,在获得较小的响应时间的同时,超调却在一定程度上有所增加。在高精度的指向控制中,期望能够快速完成位置指向,又不希望超调过大,在正常收敛后还希望保持较好的动态响应特性,常规的PID控制器无法满足该要求。
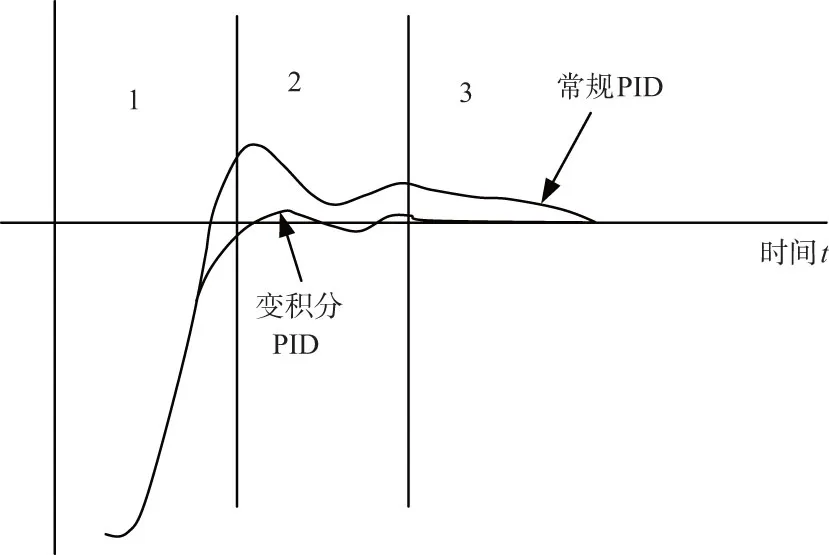
图5 常规与变积分PID控制器过度过程曲线
图5上方曲线是标准PID控制器过度过程曲线示意图,系统约有30%左右的超调,在目标搜索过程中天线小范围抖动剧烈,将无法精确指向目标。采用变积分控制的修正型PID控制器能够达到较好的控制效果,图5下方曲线是变积分PID控制器过度过程曲线。在第1阶段,控制误差较大时,积分很弱,环路类似于一型环路,能够快速、平稳运行,几乎没有超调;在第2阶段,控制误差较小,但不够小,积分逐步加强,会带来一定的超调;第3阶段,控制误差已足够小,天线运行已趋于平稳,积分加强到正常值,保证系统有足够的加速度常数,最小的动态滞后误差。通过变积分PID控制器可以在保证控制系统的响应时间的前提下,有效降低超调到10%以下,超调的减小可以提高系统的控制精度。
2.4 实验验证
根据实际卫星飞行模式,仿真回归周期内Ka频段低轨卫星的飞行航迹,并加入空间环境噪声,模拟实际卫星的卫星航迹(包括运行速度、加速度6个分量)[19]。地面接收系统根据输入条件,通过跟踪环路闭环计算出天线波束与卫星之间的角误差信号ΔUa,ΔUe,控制天线向误差减小的方向运动,完成天线的稳定捕获跟踪,来验证天线的Ka频段的跟踪精度[20]。卫星航迹一般为变加速飞行目标航路,变加速目标航路产生过程中的速度曲线图和加速度曲线如图6、图7所示,加加速度曲线如图8所示,实验中所产生的跟踪误差理论上只会由加加速度引起。
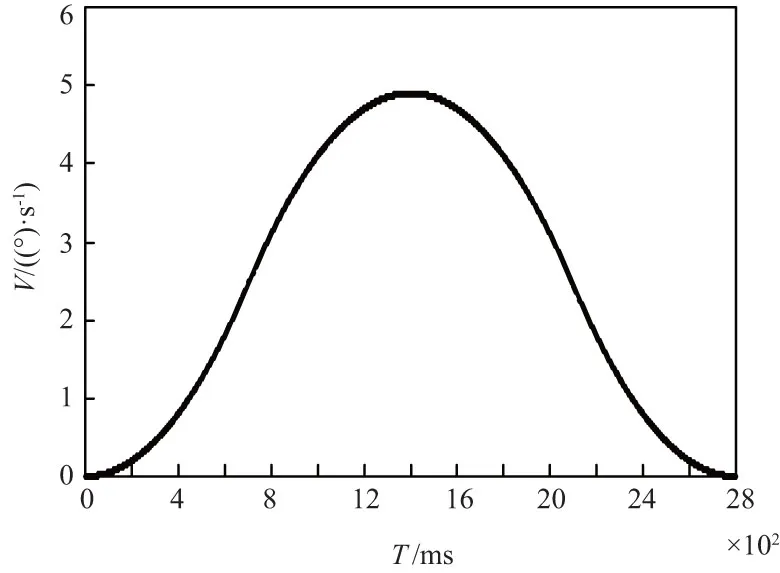
图6 速度曲线
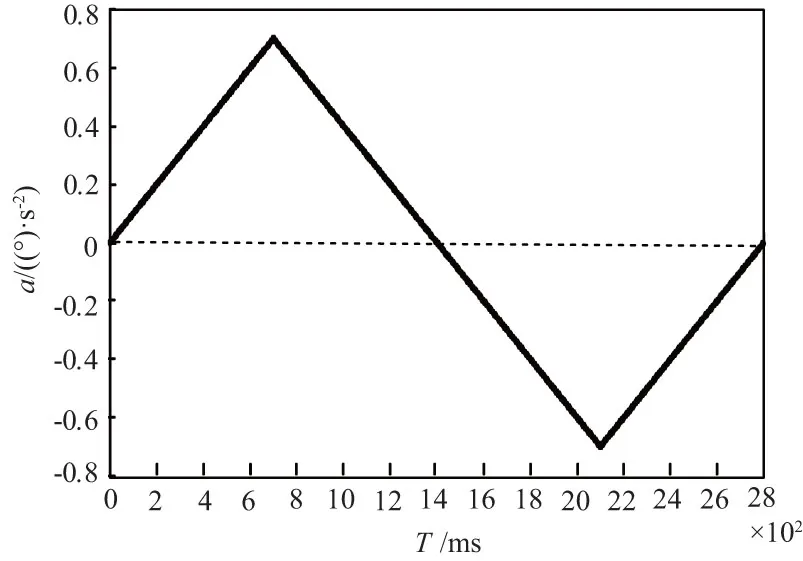
图7 加速度曲线
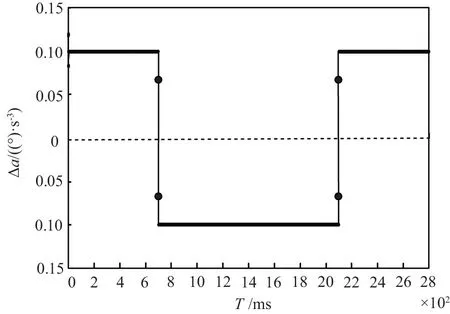
图8 加加速度曲线
实测方位轴速度曲线和加速度曲线如图9和图10所示,实测Ka跟踪角误差曲线如图11所示。当采用传统PID控制技术时,天线在上述实验中会丢失目标,不能实现Ka频段的稳定跟踪。当应用复合控制技术后,本系统可以等效为三阶PID控制系统,理论上动态滞后仅会由加加速度引起。应用复合控制技术的天线控制系统在上述实验中能够实现Ka频段的稳定跟踪。目标加速度在0~0.7变化(速度从0°/s增至5°/s再降至0°/s)的跟踪效果图,图中的跟踪角误差完全是由加速度的变化量引起,与图9的理论推断相吻合。
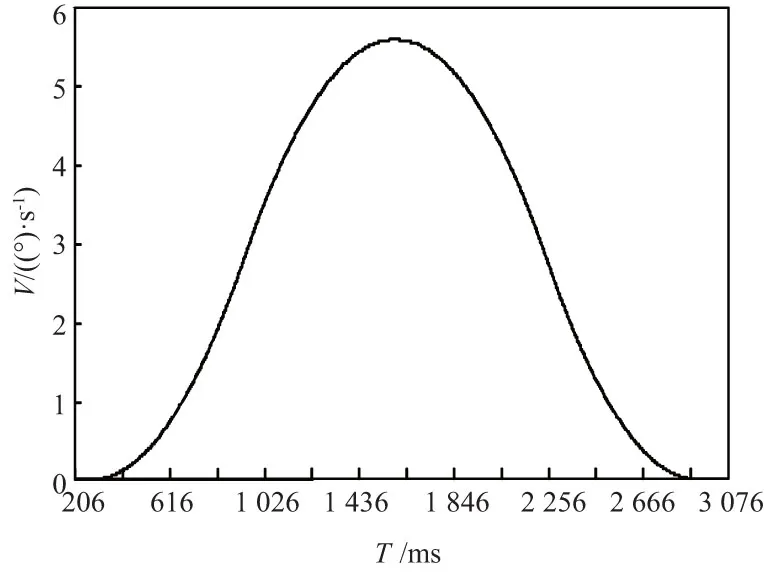
图9 实测方位轴速度曲线

图10 实测方位轴加速度曲线
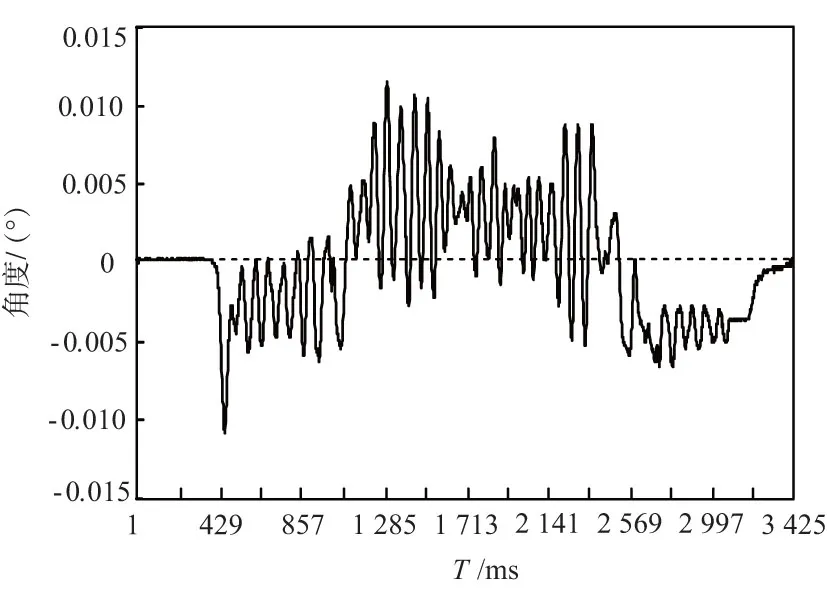
图11 Ka跟踪角误差曲线
从上述实验结果得出,跟踪系统Ka频段跟踪精度为0.005 8°,满足设计要求的0.006 5°。应用改良PID控制技术后,本系统已经成为等效三阶系统,加速度误差将趋近于0,跟踪角误差完全是由加加速度引起。所以由加速度为0.7°/s2条件下的跟踪能力测试结果,理论上可以推断出本系统在目标加速度更高条件下,也能达到上述跟踪能力。
3 结束语
高频段低轨卫星的捕获跟踪问题是制约Ka频段工程应用的关键。本文从跟踪环路设计方面论证了解决方案,结果证明积分式PID控制器可以满足低轨卫星的跟踪。但在工程应用中,Ka信号的重捕机制和流程设计也将是保证信号稳定捕获跟踪的关键,并且低轨卫星的运动速度较快,相应的多普勒频移也较大,对信号的解调处理带来了相应难题。总之,Ka频段低轨卫星的捕获跟踪工程化需要综合考虑各方面因素,根据实际建设环境设计合理有效的接收系统,才能保证稳定准确的捕获跟踪,实现Ka频段高码速率信号的传输和处理。
