含轴向偏载的行星齿轮传动系统动态特性研究
2017-11-04陈锐博张建杰周建星孙文磊
陈锐博, 张建杰, 周建星, 孙文磊
(新疆大学 机械工程学院,乌鲁木齐 830047)
含轴向偏载的行星齿轮传动系统动态特性研究
陈锐博, 张建杰, 周建星, 孙文磊
(新疆大学 机械工程学院,乌鲁木齐 830047)
轴向偏载是影响行星轮传动系统工作状态的重要因素,以行星轮传动系统为研究对象,运用牛顿动力学理论建立了行星传动平移-扭转动力学模型,讨论了轴向偏载对啮合刚度的影响。在考虑轮齿齿面接触特性基础上,揭示了轴向偏载对行星传动系统动态特性的影响。研究表明:太阳轮发生轴向偏载后,齿面接触区域产生偏移,其啮合刚度也随之发生改变。随着偏载的增大,啮合刚度逐渐减小,对行星传动系统的高阶固有频率影响较为明显。太阳轮与行星轮的外啮合动载荷将出现转频成分,并且当偏载增大时,其转频成分将明显增大,但其他频率成分基本保持不变。当存在轴向偏载时,浮动轨迹由圆形分布变为椭圆形分布,浮动轨迹中的变形量增加,从而系统振动更加明显,啮合冲击更激烈,影响系统的使用寿命。
行星轮传动;啮合刚度;轴向偏载;接触区域;动态特性
行星齿轮传动具有体积小、重量轻、效率高、工作平稳、噪声小等优点,被广泛应用于航空、船舰、风力发电、汽车等许多工业领域。为提高行星传动均载性能,太阳轮采用浮动细杆相连接,相对于其他构件的而言,其弯曲刚度较小,则易发生弯曲情况,并产生较大的振动,从而缩短行星系统的使用寿命。
国内外许多学者针对行星齿轮传动系统动态特性问题进行了大量研究,内容普遍涉及固有频率、动态响应,以及浮动轨迹等多个方面。在行星齿轮传动系统的研究中需要考虑的因素较多,主要有:时变啮合刚度、传递误差、齿侧间隙等。早期在分析系统动态特性的研究中,其刚度大多使用平均啮合刚度,但转动过程为单齿与多齿啮合的交替形式,存在时变啮合刚度,因此Lin等[1]研究了行星齿轮由啮合刚度变化引起系统参数的不稳定性。王春光[2]探讨了时变啮合刚度对系统不稳定的影响,并得出调节重合度和啮合相位可以减小特定的不稳定区域。孙涛等[3]考虑时变啮合刚度、啮合误差以及尺侧间隙等因素的基础上,采用解析谐波平衡法求得系统的非线性频响特征。齿廓的磨损与加工误差会使轮副产生齿侧间隙以及齿廓周期误差,并在齿轮间会产生接触、脱离、再接触的重复冲击现象,张锁怀等[4-5]考虑该情况研究了单级齿轮系统的拍击振动现象。随后刘国华等[6]学者对齿轮进行修形处理,有效的改善了齿轮机构的动态特性。为有效引入外部激励的影响,秦大同等[7]通过改变转矩的方法,进行了风力发电机行星齿轮传动系统动态啮合力的研究。杨军[8]通过振动学方程计算了风力发电机行星传动系统的固有频率,同时讨论了刚度对系统各阶固有频率的影响。其中Li等[9]通过讨论齿廓修形、齿面负载变化等情况下对于齿面接触区域分布情况的影响。Lin等[10]研究了当行星轮不均匀分布时,行星齿轮传动系统的固有频率以及振动模态的变化情况。Parker等[11]采用有限元/接触力学模型分析了直升机行星齿轮系统在一定运行速度和转矩范围内的动态响应,结合了传统有限元分析和Bousinesq解法的优势。现如今国内外学者针对行星系统中太阳轮发生轴向偏载情况下的研究相对较少。
本文计入了太阳轮轴向偏载的影响,建立了行星齿轮传动系统动力学模型,从齿面接触特性的角度,系统分析轴向偏载对啮合刚度以及行星传动系统动态特性的影响。
1 模型构建
本文所分析的行星齿轮传动系统如图1(a)所示,其中标识R代表齿圈,S代表太阳轮,P代表行星轮,C为行星架。行星齿轮传动系统由3个行星轮、太阳轮、行星架和内齿圈所构成。太阳轮为输入端,并且采用较细长的弹性细轴连接,起弹性浮动的作用。齿圈固定,行星架为输出端[12]。

图1 行星传动系统结构简图与三维模型Fig.1 The planetary gear transmission system sketch and three-dimensional model
本文分析模型基本参数如表1所示,其中转动惯量以及质量等均是通过UG建模得出,传动系统三维装配模型如图1(b)所示。

表1 行星齿轮传动系统参数Tab. 1 The planetary gear transmission system parameters
由于行星齿轮系统的复杂性,对其进行动力学研究时必须考虑零件或运动副的弹性。根据动力学建立原理的不同,可以将行星齿轮传动的动力学模型分为两大类,即集中参数模型和有限元模型[13]。
本文选用集中参数模型,将行星传动的各构件简化成集中质量,各构件间以弹簧作为连接形式。将其运动看成刚体运动以及弹性变形的叠加,本次行星传动系统为16自由度的平移-扭转动力学模型。模型中各个构件的支撑刚度,内啮合、外啮合刚度以及扭转刚度均用弹簧代替,现取行星架中心位置为系统坐标原点,选用水平方向为X方向,竖直方向为Y方向来构建模型。行星轮采用沿行星架均匀分布方式,并对其进行约束。
所施加载荷足够大时,太阳轮与行星轮齿轮齿廓始终保持啮合关系,并且两齿面所产生的啮合力与齿面弹性变形成线性关系,则可以把齿轮副刚度用线性弹簧来模拟,太阳轮与行星轮动力学模型如图2所示,太阳轮与行星轮的扭转和横向微位移均会对啮合作用产生影响,将其微位移转化至啮合线上。定义当啮合弹簧为压缩状态时取正值,反则拉伸为负值,则有:
δspi=xScosφspi+ySsinφspi+uS-xpisinα-
ypicosα-upi-espi(t)
(1)
式中:φspi=φc-α+φpi+π/2,
uS=θSrS,upi=θpirpi,φc=wct
其中,α为啮合角,φpi是相位角 (φi=2π(i-1)/3)。rS,rpi是太阳轮与行星轮基圆半径,espi(t)是啮合误差。
此时,齿轮啮合力为
(2)

图2 太阳轮与行星轮动力学模型Fig.2 The dynamic model of sun gear and planet gear
构建行星传动平移-扭转动力学模型如图3所示,模型中Ks,Ksθ分别为太阳轮支撑刚度与扭转刚度;kpi为行星轮支撑刚度,其中i=1,2,3;kspi与krpi分别为太阳轮与行星轮外啮合刚度及行星轮与齿圈内啮合刚度;内齿圈在其4个对称位置实施约束,取Kr代表内齿圈支撑刚度。
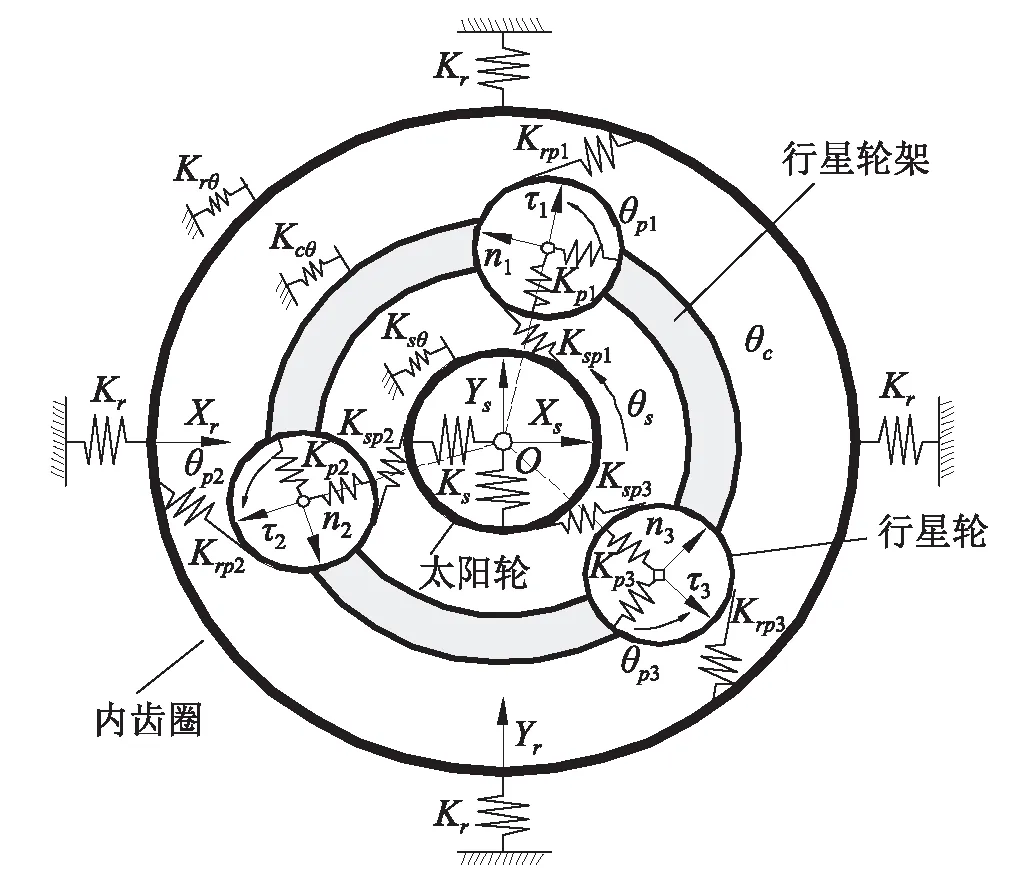
图3 行星传动平移-扭转动力学模型Fig.3 The planetary gear transmission system dynamic model
根据各个零件受力关系构建系统振动微分方程:

将式(3)写成矩阵形式得

(4)
式中:m为质量矩阵;ka(t)为支撑刚度矩阵;km(t)为时变啮合刚度矩阵;kn(t)为扭转刚度矩阵;T(t)为外部激励;系统各个构件的位移向量q表示为
q=(uc,xs,ys,us,xr,yr,ur,ξpi,ηpi,upi)T
(5)
系统中各支撑刚度与扭转刚度分别为:太阳轮支撑刚度Ks=5×106N/m;太阳轮扭转刚度Ksθ=1.5×105N·m/rad;行星轮支撑刚度Kpi=2×107N/m;行星架扭转刚度Kpθ=3.3×108N·m/rad;内齿圈支撑刚度Kr=3×108N/m;
2 参数计算
2.1 啮合刚度计算
本文通过有限元法,进行系统内外啮合刚度的求解,同时考虑太阳轮轴向偏载的情况下,太阳轮与行星轮之间外啮合刚度的变化情况。在求解外啮合刚度时,采用太阳轮施加转矩,行星轮全约束的形式进行求解,如图4(a)所示。在求解内啮合时,采用行星轮施加纯扭矩,内齿圈施加全约束的形式进行求解,如图4(b)所示。

图4 齿轮副分析模型Fig.4 Gear pair analysis model
在施加边界条件时,对从动轮内圈施加全约束,并且约束主动轮内圈的横向自由度,施加转矩在主动轮上[14]。在施加转矩时,需要将坐标系转换成圆柱坐标系,以节点的形式将转矩施加在主动轮内圈处,计算如式(6)所示
(6)
式中:Ta为单个节点施加转矩;n为节点数目;rn为主动轮内圈半径;rb为主动轮基圆半径。
通过变形云图计算出主动轮内圈变形量μ1,利用式(7)求得主动轮变形角度δ1,最终求得啮合线位置处的等效变形μ:
(7)
式中:δ1为主动轮变形角度;rn为主动轮内圈半径;μ1为主动轮内圈变形;μ为啮合线处等效变形。
求解时,选用罚函数法进行求解,该方法允许接触目标存在一定量的渗透,并可通过改变接触刚度值来控制表面渗透的程度[15]。最终使用刚度计算式(8)进行刚度求解

(8)
通过上述计算方法,我们依次算出一个啮合周期内,10种啮合状态下的齿轮啮合刚度。并通过数值计算的插值法,拟合成一个周期内的曲线,进行求解内外啮合时刚度的变化情况,并绘制曲线图,如图5(a)所示。

图5 啮合刚度变化图以及应力分布图Fig.5 Meshing stiffness variation and stress distribution diagram
从图5中可以清楚的看出,啮合刚度为时变啮合刚度,为拱形分布。双齿啮合刚度大于单齿啮合刚度,双齿啮合状态下,轮齿啮合变形减小,从而刚度增大。齿轮的啮合周期为双齿-单齿-双齿啮合,最后退出啮合的过程,为时变啮合刚度,因此存在刚度的突变,容易产生较大刚度激励。
现将接触位置的轮齿轮廓曲线长度延展后的长度定义为轮廓曲线长度,为图5(b)中的纵坐标。从图5(b)中可以清楚的看出接触区域应力成带状分布,并且越接近理论接触位置等效应力值越大。由于齿面摩擦的原因,接触线沿齿高方向的两侧并未呈现对称性的情况,接触线上方向着齿顶的方向等效应力变化较为剧烈,反之,接触线下方向着齿根的方向等效应力变化较为平缓。接触线区域为主要的承载区域,该区域载荷分布较大,并且分布较为均匀,但由于存在边缘效应的原因,齿轮接触区域的两端存在较大的应力集中,接触范围变化最明显。本次所绘的啮合位置应力分布图与文献9中基本相同,但本文所绘图在齿端两侧出现了明显边缘效应区域。
2.2 系统的固有特性分析
当系统外部激励T(t)=0时,式(4)可得自由振动方程为
(9)
将系统固有特性变化为求解特征值问题,即:

(10)

(11)
将计算的刚度结果带入行星传动平移-扭转动力学模型中,通过求解即可得到系统固有频率,如表2所示,可以看出该行星传动系统的固有频率范围420~16 703 Hz,共16阶。由于行星传动动力学模型的对称性,会引起系统固有频率产生重频现象。本文分析对象中心构件平移振动模式出现6对重频(分别为ω1=ω2、ω3=ω4、ω6=ω7、ω12=ω13、ω14=ω15和ω8=ω9)与系统6构件横向自由度数相等;行星轮振动模式共有3阶固有频率等于系统3个行星轮扭转自由度数[16]。所得结论与文献[16]基本相同。

表2 固有频率Tab.2 The natural frequency
行星传动系统振型分为3种,分别为中心构件平移振动模式、中心构建扭转振动模式、以及行星轮振动模式,其中中心构件包括行星架,太阳轮,内齿圈。如图6所示。
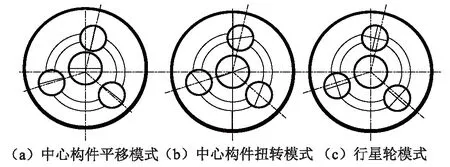
图6 行星传动系统振型Fig.6 Planetary transmission system vibration mode
3 偏载对行星系统的影响
3.1 轴向偏载对于刚度的影响
对于主要承受弯曲的梁和轴,挠度和转角过大会影响构件或零件的正常工作。齿轮轴的挠度过大会影响齿轮的啮合,或增加齿轮的磨损并产生噪声,同时当轴承支撑的轴在支撑处的转角如果过大时,会增加轴承的磨损。
连接太阳轮的轴存在较大弹性浮动,在工作状态下,易发生弯曲,从而受载不均匀,产生弯曲,形成轴向偏载的情况,最终导致齿面载荷分布不均匀。现定义γ为轴偏载位移量,如图7所示本文讨论γ为正常情况下,1μ,3μ的情况下,齿轮刚度的变化曲线如图8所示。
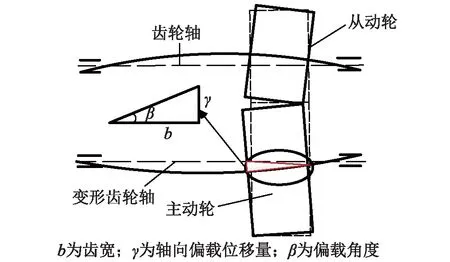
图7 轴向偏载示意图Fig.7 Diagrammatic sketch when the axis bending
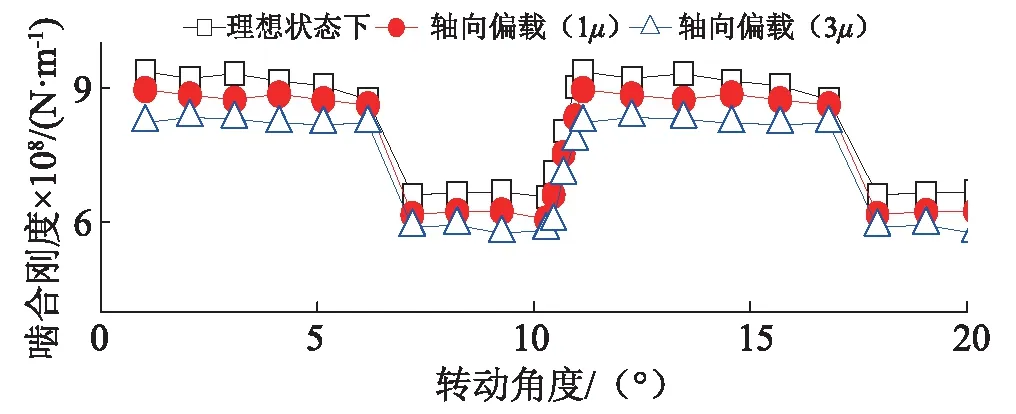
图8 轴向偏载时刚度的变化曲线Fig.8 Stiffness variation curve when the axis bending
当轴发生轴向偏载时,对齿轮刚度的分布状况是有影响的,随着偏载的增大,齿轮啮合刚度逐渐降低。从图8中可以清楚的看出双齿啮合区域降低幅度远大于单齿啮合区域。刚度随着轴向偏载的变化原因是由于齿轮在啮入啮出的过程中发生了齿顶的干涉情况,造成齿顶处等效应力较为集中,从而产生相应的影响。
从图9中可以清楚的看出接触区域的改变,结合刚度随轴向偏载变化曲线如图8所示。如图9,可以看出随着轴向偏载的增大,最大接触区域逐渐向轴向偏载位置移动,局部位置呈现较大的应力分布情况,并呈现不规则分布。如图9(b),接触线两侧的应力分布范围同样存在较大改变,接触线上方沿着齿顶方向接触应力变化更加剧烈,同时,接触线下方沿着齿根方向接触应力变化也较为剧烈。综上所述,当轴向偏载发生时,会导致接触区域的应力分布变化,齿轮产生变形,进而影响齿轮刚度的变化。

图9 啮合区域应力分布图Fig.9 Stress distribution of meshing area
3.2 轴向偏载对固有频率的影响
现探讨轴向偏载对行星齿轮传动系统的固有频率的影响,当连接太阳轮的弹性细杆发生弯曲时,行星系统的结构将发生改变,转动轨迹近似于椭圆形的方式转动,故而探讨偏载状态下,固有频率的变化。通过改变偏载量分别为1μ,3μ时,观察固有频率的变化规律。
如图10所示,通过观察可以看出,在1~9阶时,其固有频率基本保持不变,由此可得结论:轴向偏载对行星传动系统的低阶固有频率影响较小。但10阶、12阶、13阶、14阶、15阶、16阶情况下,其行星系统的固有频率随着偏载的增大,在逐渐减小,因此轴向偏载对行星系统的高阶固有频率的影响较明显。随轴向偏载的增大,系统低阶固有频率基本不变,高阶固有频率减小,但各阶振型基本不变。由于本文只是改变了其连接太阳轮的细杆的轴向偏载,故其主要影响高阶扭转振形的固有频率,以及与太阳轮啮合的行星轮平移振动模式的固有频率。
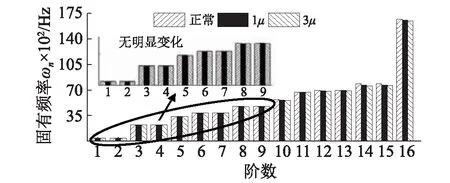
图10 偏载对系统固有频率变化图Fig.10 System natural frequency change when the axis bending
3.3 轴向偏载对动态特性的变化
当太阳轮发生轴向偏载时,行星系统的动态特性将发生改变,由于偏载量较小,动态特性的变化情况并不明显,为了能充分研究偏载对系统动态特性的影响,将偏载量进行增大。偏载量为1μ,3μ,5μ,10μ,15μ,20μ,研究动态特性的变化。
在一定负载作用下,保证齿轮副始终处于接触状态,通过式(12)计算啮合频率,其转速为700 r/min,转矩为500 N·m时计算行星传动系统的动载荷,如图11所示。
(12)
式中:nc为行星架转速;ns为太阳轮转速;np为行星架转速;zs为太阳轮齿数;zp为行星轮齿数;fp为啮合频率。
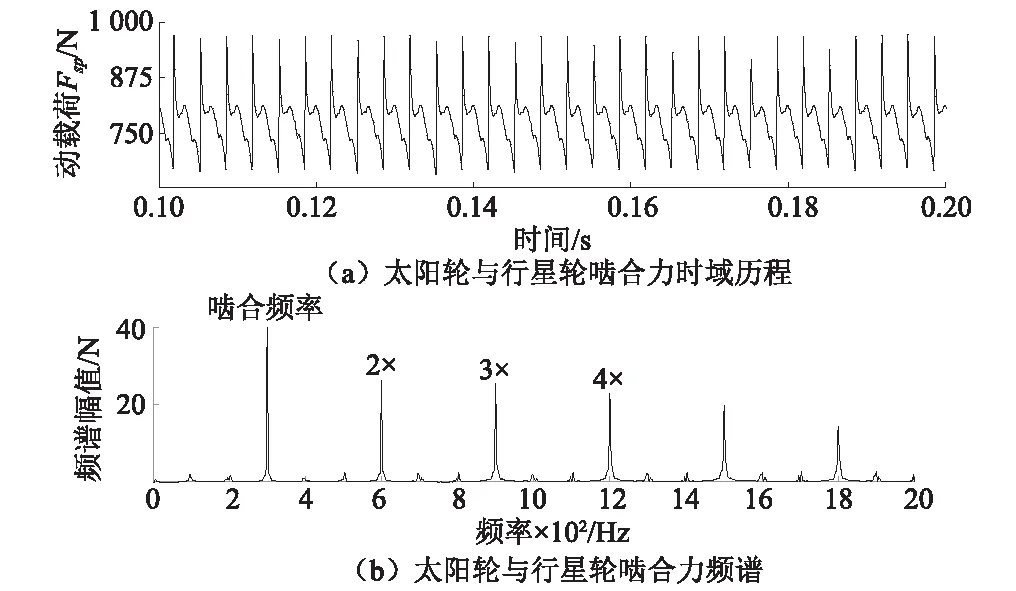
图11 正常情况下太阳轮与行星轮动载荷 Fig.11 The dynamic force of sun gear and planet gear in the normal condition
太阳轮与行星轮外啮合时域历程如图11(a)所示,可以看出,外啮合的动载荷成周期变化,周期为T,其动载荷均值为778 N,波动幅值为194 N;太阳轮与行星轮的外啮合动载荷的主要频率成分为啮合频率(292.6 Hz),2倍频,3倍频及4倍频,其中啮合频率成分能量最大。
当太阳轮轴向偏载为20μ时,通过计算行星轮绕太阳轮公转一周的各个位置处的时变啮合刚度,引入至系统动力学模型,采用时域积分方法求解模型,即可得到系统动载荷,如图12(a)所示,由于转速保持700 r/min不变,则系统的啮合频率保持一致为292.6 Hz,并且啮合频率的成分能量最大。由于轴向偏载的缘故,外啮合的动载荷呈周期变化,其曲线图为波动情况,近似于正弦曲线图,其动载荷均值为783 N,波动幅值高达230 N。此时各频率成分的幅值代表该时域状态下所具有的能量。由于太阳轮发生偏载后,太阳轮类似于凸轮的形式进行转动,其轮齿啮合区域发生了明显变化,类似于偏心轮接触的方式,则其动载荷也变成正弦的波动形式。行星系统正常情况下太阳轮无转频成分,但偏载为20μ时,太阳轮出现转频成分,其幅值为21 N,即该时域状态下转频所具有的能量。由此可见轴向偏载的增大,改变了太阳轮的频率成分,出现了转频成分。由于轴向偏载情况的存在,太阳轮发生不平衡或倾斜的现象,当太阳轮存在轴向偏载时,太阳轮与其相啮合的3个行星轮的接触区域均发生了改变,并且接触区域均向不同方向发生了偏移,由于接触区域的变化,则太阳轮将存在转频成分。
通过研究偏载状态对啮合频率幅值以及转频幅值影响如图13所示,由于转速固定为700 r/min的情况下,观察各种偏载情况下的啮合频率幅值并未存在明显的变化,同时,其各倍频也无明显变化,其幅值基本稳定,所以偏载的存在对其啮合频率的影响并不显著。通过观察太阳轮的转频曲线,正常状态下的动载荷频域图,太阳轮无转频成分,但随着偏载的增大,其转频能量明显增大,当偏载量增大到20μ的时候,其转频的幅值为21 N,太阳轮转频幅值随偏载增大而逐渐增大,呈线性递增的方式,转频成分的能量明显增大。由于啮合齿轮在转动过程中,齿顶位置存在间隙,当发生轴向偏载时,对齿轮啮合频率等相关成分影响较小。
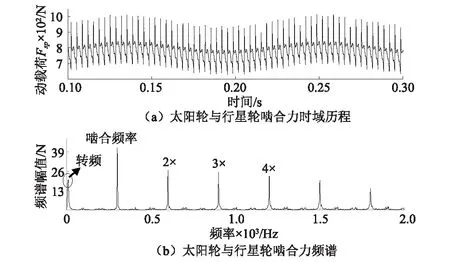
图12 偏载情况下太阳轮与行星轮动载荷 Fig.12 The dynamic force of sun gear and planet gear when the axis bending
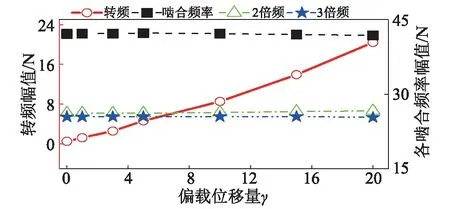
图13偏载对于啮合频率幅值以及转频幅值变化图 Fig.13 The change of meshing frequency amplitude and rotating frequency amplitude
3.4 轴向偏载对中心轮浮动轨迹影响
通过研究偏载状态下,太阳轮的浮动轨迹变化如图14所示,正常情况下太阳轮浮动轨迹,当转速为700 r/min时,太阳轮浮动轨迹近似为圆形,浮动范围为-10.9 μm~10.9 μm,浮动轨迹的内圈为太阳轮所运动的轨迹,正常情况下,载荷施加均匀并无误差存在时,太阳轮的运动轨迹为圆形。由于太阳轮的扭转固有频率作用,太阳轮产生了振动。在不同偏载情况下,其太阳轮的浮动轨迹也发生了相应变化。观察下图14(a)中太阳轮浮动轨迹可得,随着偏载的增加,其X方向以及Y方向的位移范围也在相应增大,当偏载达到5μ时,其X方向上的位移量为-12 μm~12 μm,Y方向上的位移浮动范围为-11.2 μm~11.2 μm,近似为椭圆形分布。通过计算X方向上的变形量为6.3 μm,Y方向上的变形量为4.6 μm。当偏载达到20μ时,浮动轨迹呈椭圆形分布。其X方向上的变形量为21 μm,Y方向上的变形量为19.5 μm。轴向偏载越大,其浮动轨迹图呈椭圆趋势越明显,其偏载方向X的浮动位移量相对较大,并且由于X方向为主要倾斜方向,所以X方向的变形比较大。Y方向浮动位移量相对较小,且Y方向上的变形量略小于X方向,其主要变形在X方向上。通过研究表明,当轴向偏载存在时,其太阳轮的浮动轨迹发生了相应变化,随着轴向偏载的增大,太阳轮的浮动量越大,太阳轮的变形也在增大,其运动轨迹也逐渐趋近于椭圆形。由于偏载的情况,偏载越大,行星系统的载荷分布越不均匀,需要越大的浮动量来平衡载荷。因此偏载方向处的浮动位移量较大,也同样会产生较大的冲击力,进而增大该方向的变形量。
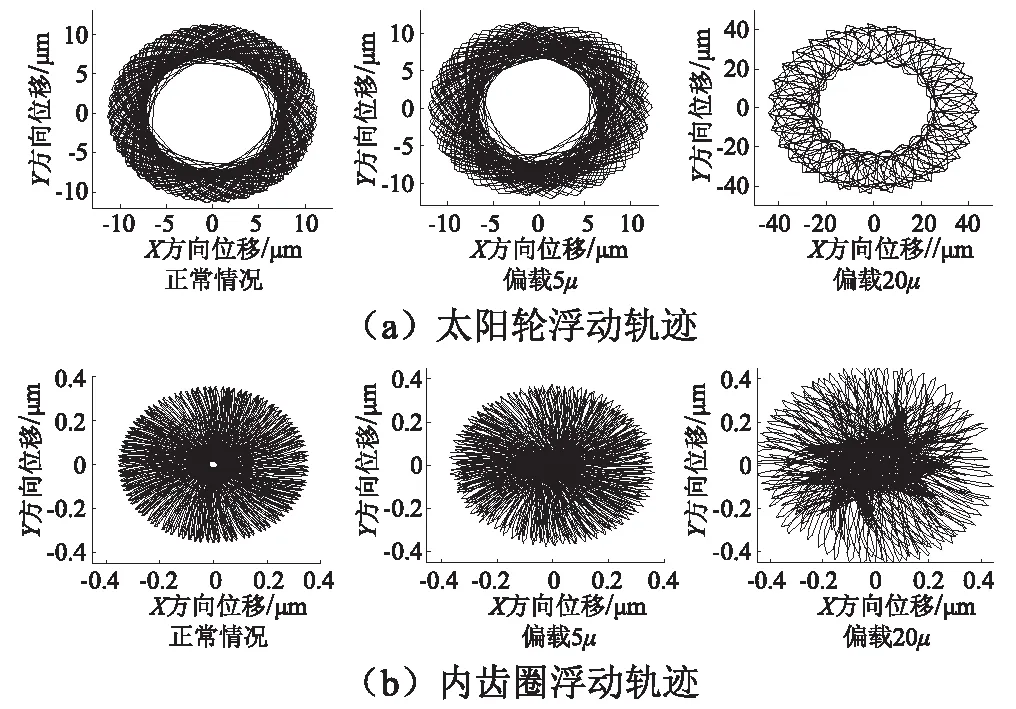
图14 各偏载下中心轮与内齿圈的浮动轨迹Fig.14 Floating track of the center wheel and the ring gear
图14(b)所示,当内齿圈处于正常状态下时,其内齿圈浮动轨迹近似于圆形分布,X、Y方向上的变形量均为0.36 μm,偏载越大,内齿圈的浮动轨迹同样越趋近于椭圆形分布,偏载为20μ时,其浮动轨迹成发散状。通过研究表明,偏载的增大,内齿圈的变形量也在增大,但增加幅度较小,则偏载对内齿圈的变形量变化影响并不显著。主要影响其浮动轨迹的形状,由于内齿圈的浮动能够完成构件误差对内啮合轮齿的法向位移要求。内齿圈固定在支架上,其支撑刚度较大,则内齿圈的浮动轨迹较不明显,内齿圈的变形量也相对较小。
4 结 论
(1)轴向偏载会导致齿轮在啮合过程中啮合刚度的降低,单齿啮合区域中的啮合刚度降低幅度比双齿啮合区域中啮合刚度降低幅度小,接触位置也发生偏移。
(2)轴向偏载变化时,对系统高阶固有频率影响较为显著,低阶固有频率基本稳定。随着轴向偏载的增大,其高阶固有频率降低。
(3)对系统动态特性而言,太阳轮与行星轮的外啮合动载荷将出现转频成分,并且当偏载增大时,其转频成分将明显增大,其他频率成分基本保持不变。
(4)通过研究发现,当随着轴向偏载的改变,其太阳轮的浮动轨迹也发生了相应变化,由于轴向偏载的增大,太阳轮浮动轨迹变大,其变形量变大。偏载的改变,对内齿圈的变形量影响较小,只影响其浮动的轨迹。
[1] LIN J,PARKER R G. Planetary gear parametric instability caused by mesh stiffness variation[J]. Journal of Sound and Vibration, 2002,249(1): 129-145。
[2] 王春光. 行星齿轮传动动态特性的研究[D].北京:中国舰船研究院,2005.
[3] 孙涛,沈允文,孙智民,等. 行星齿轮传动非线性动力学方程求解与动态特性分析[J]. 机械工程学报,2002,38(3):11-15.
SUN Tao,SHEN Yunwen,SUN Zhimin, et al. Nonlinear dynamic equation and dynamic characteristics analysis[J].Journal of Mechanical Engineering,2002,38(3) : 11-15.
[4] 张锁怀,沈允文,董海军,等. 单级齿轮系统拍击特性研究[J]. 机械工程学报,2003(3): 28-31.
ZHANG Suohuai, SHEN Yunwen, DONG Haijun, et al. Research on rattling dynamics of one-stage gear system[J]. Journal of Mechanical Engineering, 2003(3): 28-31.
[5] 张锁怀,沈允文,董海军,等. 齿轮拍击系统的动力响应[J]. 振动工程学报,2003(1): 66-70.
ZHANG Suohuai, SHEN Yunwen, DONG Haijun, et al. Dynamic response of a gear rattling system[J]. Journal of Vibration Engineering, 2003(1): 66-70.
[6] 刘国华,李亮玉. 含间隙和时变啮合刚度的渐开线齿轮副齿廓修形研究[J]. 中国机械工程,2007(12): 1409-1413.
LIU Guohua, LI Liangyu. Research on conjugating tooth profile of involute gear transmission with backlash and time—varying stiffness[J]. China Mechanical Engineering, 2007(12): 1409-1413.
[7] 秦大同,田苗苗,杨军. 变风载下风力发电机齿轮传动系统动力学特性研究[J]. 太阳能学报,2012(2):190-196.
QIN Datong, TIAN Miaomiao, YANG Jun. Study on dynamic characteristics of gear transmission system of wind generator under varying wind load [J]. Acta Energiae Solaris Sinica,2012(2): 190-196.
[8] 杨军. 风力发电机行星齿轮传动系统变载荷激励动力学特性研究[D].重庆:重庆大学,2012.
[9] LI Shuting. Effects of misalignment error,tooth modifications and transmitted torque on tooth engagements of a pair of spur gears[J].Mechanism and Mechine Theory, 2015, 83: 125-136.
[10] LIN J, PARK R G. Structured vibration characteristics of planetary gears with unequally spaced planets[J]. Journal of Sound and Vibration,2000,233(5): 921-928.
[11] PARKER R G, AGASHE V, VIJAYAKAR S M. Dynamic response of a planetary gear system using a finite element/contact mechanics mode[J]. Journal of Mechanical Design, 2000, 122: 304-310.
[12] ZHOU Jianxing, SUN Wenlei, YUAN Liang. Nonlinear vibroimpact characteristics of a planetary gear transmission system[J]. Shock and Vibration, 2016(4): 1-11.
[13] 李润方,王建军. 齿轮系统动力学——振动、冲击、噪声[M].北京: 科学出版社, 1997: 380-405.
[14] 周建星,孙文磊,曹莉,等. 行星齿轮传动系统碰撞振动特性研究[J]. 西安交通大学学报,2016(3): 16-21.
ZHOU Jianxing,SUN Wenlei,CAO Li,et al. Vibro-impact characteristics of planetary gear transmission[J]. Journal of Xi’an Jiaotong University,2016(3): 16-21.
[15] 卜忠红,刘更,吴立言. 行星齿轮传动动力学研究进展[J]. 振动与冲击,2010,29(9): 161-166.
BU Zhonghong, LIU Geng, WU Liyan. Research advances in planetary gear trains dynamics [J]. Journal of Vibration and Shock,2010,29(9): 161-166.
[16] 许华超,孙文磊,周建星,等. 风电机组行星传动系统固有特性灵敏度研究[J]. 太阳能学报,2016(1): 201-207.
XU Huachao,SUN Wenlei,ZHOU Jianxing,et al. Sensitivity of planetary natural characteristics used in wind turbine [J]. Acta Energiae Solaris Sinica,2016(1): 201-207.
[17] 邱星辉,韩勤锴,褚福磊. 风力机行星齿轮传动系统动力学研究综述[J]. 机械工程学报,2014(11): 23-36.
QIU Xinghui,HAN Qinkai,CHU Fulei. Review on dynamic analysis of wind turbine geared transmission systems [J]. Journal of Mechanical Engineering, 2014(11): 23-36.
[18] WU S, ZUO M J, PAREY A. Simulation of spur gear dynamics and estimation of fault growth[J]. Journal of Sound and Vibration 2008,317 (3/4/5): 608-624.
[19] PEETERS J L M, VANDEPITTE D, SAS P. Analysis of internal drive train dynamics in a wind turbine[J]. Wind Energy, 2006(9): 141-164.
[20] AMBARISHA V K, PARKER R G. Nonlinear dynamics of planetary gears using analytical and finite element models[J]. Journal of Sound and Vibration, 2007, 302: 577-595.
[21] 石万凯,刘敬,龚建春. 同轴对转行星齿轮传动系统动态特性分析[J]. 振动与冲击,2014,33(7): 99-104.
SHI Wankai, LIU Jing, GONG Jianchun. Dynamic characteristics analysis for a co-axial counter-rotating planetary gear transmission system[J].Journal of Vibration and Shock, 2014,33(7): 99-104.
[22] 刘辉,蔡仲昌,项昌乐. 两级行星齿轮传动非线性啮合力频率耦合与动态特性研究[J]. 振动与冲击,2015,34(19): 13-23.
LIU Hui, CAI Zhongchang, XIANG Changle. Frequency coupling and dynamic characteristics pf nonlinear meshing force for two-stage planetary gears[J]. Journal of Vibration and Shock, 2015,34(19): 13-23.
Astudyonthedynamiccharacteristicsofaplanetarygearsystemwithconsideringcontacttoothsurface
CHENRuibo,ZHANGJianjie,ZHOUJianxing,SUNWenlei
(SchoolofMechanicalEngineering,XinjiangUniversity,Urumqi830047,China)
Axial partial load is an important factor influencing the stability of a planet wheel drive system. Based on the planet wheel drive system and the Newtonian dynamics theory, a planetary transmission dynamics model was established. The effect of axial load for meshing stiffness was studied. At the same time, considering the influence of the tooth surface contact characteristics of mesh stiffness, the axial partial load impact on the natural frequency of the planetary system, the influence of the axial partial load on the system dynamic characteristics was studied. The research shows that: the sun wheel connects thin rod axial after partial load, the meshing stiffness decreases with the increase of partial load. Axial deviation of the existence of a planet wheel has obviously influence on high order natural frequency. When the partial load increases, the high order natural frequency decreases. With the increase of axial partial load round the sun and the planets round of external gear dynamic load changes into a sine curve, frequency domain figure appeared switch frequency. And partial load increases, the frequency amplitude increases obviously. Meshing frequency amplitude is basically stable, does not affect the frequency doubling amplitude.
planetary gear transmission; meshing stiffness; axial eccentric load; contact area; dynamic characteristics
国家自然基金(51665054;51565055)
2016-10-10 修改稿收到日期: 2016-11-17
陈锐博 男,硕士生, 1993年生
张建杰 男,副教授,硕士生导师,1973年生
TH113
A
10.13465/j.cnki.jvs.2017.20.028
