基于近似极小值原理的插电式混合动力汽车实时控制策略研究∗
2017-10-12曾育平秦大同
曾育平,秦大同
基于近似极小值原理的插电式混合动力汽车实时控制策略研究∗
曾育平1,秦大同2
(1.南昌工程学院,江西省精密驱动与控制重点实验室,南昌 330099; 2.重庆大学,机械传动国家重点实验室,重庆 400044)
将发动机的瞬时油耗拟合成由一次函数和二次函数组成的分段函数,将电池瞬时等效油耗拟合成由两个二次函数组成的分段函数,在此基础上,通过对Hamilton函数的分析,并根据凸函数的性质提出了通过缩小最优控制变量搜索空间来缩短寻优时间的近似极小值原理控制策略,然后选取一段随机工况分别对此控制策略进行仿真和整车道路试验,并分别对基于规则的CD-CS模式控制策略和基于近似极小值原理的控制策略进行整车对比道路试验。仿真和整车道路试验结果表明,本文中提出的基于近似极小值原理的控制策略实时性好,能应用于车辆实时能量管理控制,且具有良好的燃油经济性,与基于规则的CD-CS模式控制策略相比,整车等效燃油消耗约降低23%。
插电式混合动力汽车;近似极小值原理;实时控制策略
Keywords:plug-in hybrid electric vehicle; approximate Pontryagin's minimum principle; real time control strategy
前言
整车控制策略是插电式混合动力汽车的关键技术之一,其对整车的燃油经济性和排放性能具有重要影响,目前对插电式混合动力汽车整车能量管理控制策略的研究主要集中在以下两个方面。
(1)基于等效燃油消耗最小的瞬时优化控制策略研究。文献[1]和文献[2]中研究了已知行驶工况下的等效燃油消耗最小插电式混合动力汽车控制策略;文献[3]中研究了计及电池健康程度的等效燃油消耗最小的多目标瞬时优化控制策略;文献[4]中研究了在未知行驶工况条件下等效系数自适应调节的等效燃油消耗最小控制策略。
(2)基于极小值原理或基于动态规划等算法的全局控制策略研究。文献[5]和文献[6]中研究了已知行驶工况下的极小值原理控制策略;文献[7]中通过模型预测控制在线调节拉格朗日因子从而实现了极小值原理在未知行驶工况下的应用;文献[8]中研究了基于拉格朗日参数自适应调节的极小值原理控制策略;文献[9]~文献[11]中研究了基于动态规划算法的插电式混合动力汽车控制策略。虽然这些控制策略的研究比较深入,但是这些控制策略的研究都是基于Matlab/Simulink的仿真研究,由于实时性差,很少应用于实际车辆。
本文中针对某单电机并联式插电混合动力汽车,在拟合发动机的瞬时油耗和电池瞬时等效油耗的基础上,通过分析Hamilton函数,并根据凸函数的性质提出了通过缩小最优控制变量搜索空间来缩短寻优时间的近似极小值原理控制策略。并通过Matlab/Simulink/Stateflow和D2P工具包Motohawk开发整车控制软件,对该控制策略进行了实车道路试验。
1 插电式混合动力汽车系统结构
本研究对象是单电机并联式插电混合动力汽车,其动力系统结构如图1所示,主要由发动机、ISG电机、湿式多片离合器C1、CVT(continuously variable transmission)、电动油泵、电池组和充电器组成。整车控制器通过控制湿式多片离合器的接合与分离实现整车工作模式的切换;通过控制电动油泵的运转实现低转速时蓄能器油压与CVT油压的建立;通过CAN总线实现与发动机控制器、电机控制器、电池管理系统、CVT控制器的通信,监测车辆的运行状态,完成对ISG电机和发动机工作模式和转矩、转速的控制。插电式混合动力汽车动力系统参数见表1。
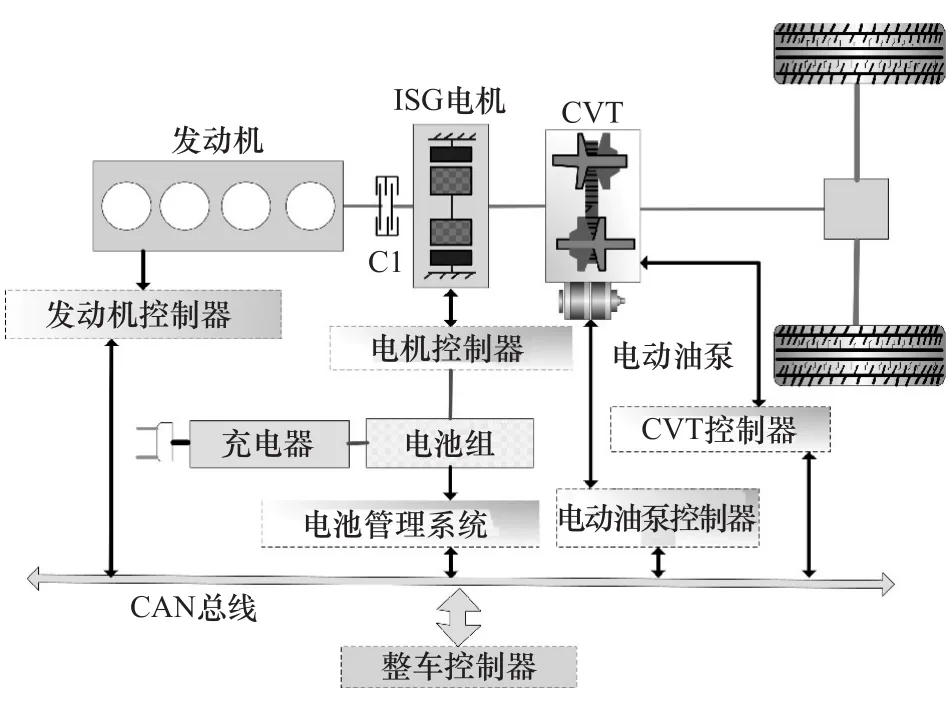
图1 插电式混合动力汽车动力系统
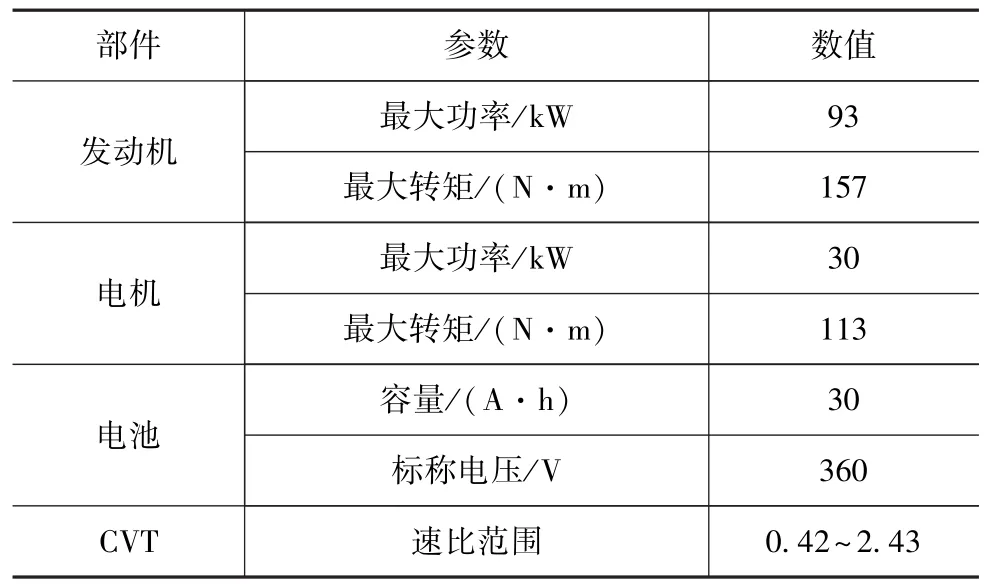
表1 插电式混合动力汽车的动力系统参数
2 基于近似极小值原理的控制策略
基于极小值原理的控制策略将全局优化转化为瞬时优化,因此理论上该控制策略可以应用于实时控制,但是由于Hamilton函数是控制变量u(t)的复杂函数,并且在搜索最优控制变量时需要遍历整个控制变量域,因此基于极小值原理的控制策略所需计算量大时间较长,实际上难以实现实时控制。为此本文中在拟合发动机瞬时油耗模型和电池瞬时等效油耗模型的基础上,提出了通过缩小最优控制变量搜索空间来缩短寻优时间的近似极小值原理控制策略。
2.1 发动机瞬时油耗拟合模型
图2为实测的发动机瞬时油耗曲线。图中每条曲线上的星号对应于发动机该转速下的燃油消耗率最低点。由图可知,在一定的转速下,发动机的瞬时油耗随发动机输出转矩的变化关系可分为3段:第1段为发动机的瞬时油耗随发动机输出转矩增大而迅速增大,其主要原因是发动机在此阶段处于低负荷区,发动机的节气门开度比较小,发动机燃烧室油/气比浓度高,燃油燃烧速度比较慢;第2段为发动机的瞬时油耗随发动机输出转矩的增加而线性增加,其主要原因是发动机在此阶段处于中负荷区,发动机燃烧室油/气比浓度较适中,发动机的输出转矩、输出功率和瞬时油耗都随节气门的开度增大而近似线性增加;第3段为发动机的瞬时油耗随发动机输出转矩增加而迅速增加,其主要原因是在此阶段发动机处于高负荷区,发动机节气门处于全开状态,发动机输出转矩只能通过供油的增加而增加。对于插电式混合动力汽车,其发动机的实际工作要求是避免其工作在低负荷区,即避免工作在第1阶段。
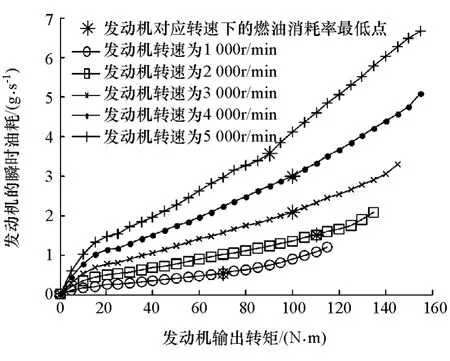
图2 实测的发动机瞬时油耗曲线
通过对实测发动机瞬时油耗曲线的分析并结合插电式混合动力汽车发动机的实际工作要求,发动机的瞬时油耗曲线可以分别用线性函数和二次函数拟合,其拟合结果如图3所示,星号左边的实线通过线性拟合获得,星号右边的实线通过二次函数拟合获得。图中虚线为各转速下发动机实测瞬时油耗曲线。由图3可知,拟合值和实测值基本一致。因此发动机的瞬时油耗可表示为式(1)。根据凸函数的定义可以判定:在一定转速下,发动机的瞬时油耗为[Temin,Temax]上的凸函数。
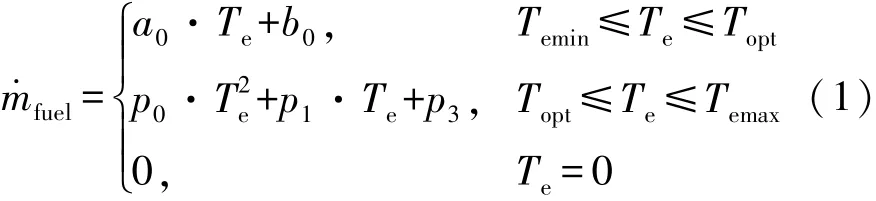
式中:a0,b0,p0,p1和 p3为拟合参数;Topt为各转速下发动机燃油消耗率最低点所对应的转矩;Temin和Temax分别为发动机在各转速下的最小和最大转矩。

图3 发动机瞬时油耗的拟合图
2.2 电池瞬时等效油耗拟合模型
将电池瞬时能耗的变化等效为发动机瞬时能耗的变化,假设它们之间的转换因子为s,则电池瞬时等效油耗可表示为
式中:pbat为电池充放电功率,W;Qlhv为燃油的低热值,J/g;Uoc为电池电动势;Qbat0为电池的额定容量;λ称为等效系数。由式(2)可知,在已知行驶工况和一定的电池SOC下,电池瞬时等效油耗是电池SOC导数的线性函数,因此电池瞬时等效油耗的拟合模型可在电池SOC导数拟合模型的基础上获得。
根据电池内阻简化模型,可计算SOC的导数:

式中:Tm为电机输出矩,N·m;ωm为电机的角速度,rad/s;Pm为电机功率,W;ηm为电机效率;I为电池电流,A;Pbatt为电池的充放电功率,W;Q0为电池的初始电量;Rint为电池内阻,Ω;Uoc为电池的开路电压,V。
根据式(3)~式(5)算得的电池SOC导数精确值拟合出曲线,图4为电池SOC为0.5时的SOC导数拟合曲线,其中小圆点为计算的数据点,每条曲线都由两个二次函数拟合组成,电机输出转矩为0的点为两段二次曲线的连接点。因此电池SOC的导数可表示为


图4 电池SOC为0.5时的SOC导数拟合曲线
图5 为电池SOC为0.5且λ为1 800时的电池瞬时等效油耗曲线。由图5和凸函数的定义可知,在一定的转速下,电池瞬时等效油耗为[Tmmin,Tmmax]上的凸函数,Tmmin和Tmmax分别为电机在该转速下的最小和最大转矩。
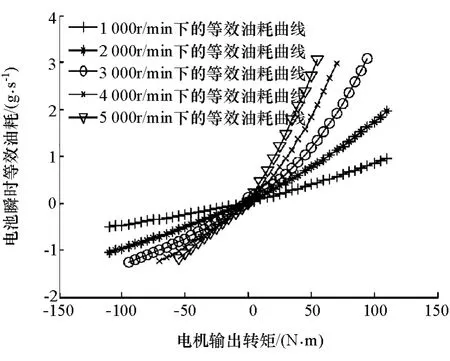
图5 电池SOC为0.5时的电池等效油耗曲线
2.3 Hamilton函数
目标函数取得最小值的条件是Hamilton函数在控制变量的容许可达集内取得极小值。式(7)为Hamilton函数,是由发动机瞬时油耗和电池瞬时等效油耗组成的总等效油耗。

由于发动机瞬时油耗和电池瞬时等效油耗分别是 Te∈[Temin,Temax]和 Tm∈[Tmmin,Tmmax]上的凸函数,且二者的中间转折点分别为Te=Topt和 Tm=0。由凸函数的性质可知,Hamilton函数为Tm∈[Umin,Umax]上的凸函数,Umin和 Umax为

式中:Treq为发动机和电机的总需求转矩,因此Hamilton函数在Tm∈[Umin,Umax]上的极小值只可能在Tm=Umin,Tm=Treq-Topt,Tm=0 和 Tm=Umax4 个点取得。 当 Te=0,即 Tm=Treq时,Tm∉[Umin,Umax],因此Hamilton函数在Tm=Treq处也可能取极小值。综上所述,Hamilton函数的极小值,即目标函数的最小值只可能从以下 5个点取得:Tm=Umin,Tm=Treq-Topt,Tm=0,Tm=Umax和 Tm=Treq,因此只需比较这 5 个点的Hamilton函数值的大小就可以确定最优解。这就将最优解的搜索区域由整个控制变量的容许可达集简化到了5个搜索点,大大减少了计算时间和计算存储空间。
3 结果与分析
3.1 基于近似极小值原理控制策略的仿真结果与整车道路试验结果对比分析
为验证本文中提出的控制策略的实时性和控制效果,在同一随机工况下对此控制策略分别进行了仿真和整车道路试验,仿真在台式电脑上进行,该电脑具有8GB内存、四核主频3.1GHz处理器和64位Win7操作系统。试验采用的控制器为D2P,其内存为64KB,处理器为 80MHz主频的 Motorola MPC5554。控制策略的仿真软件在Matlab/Simulink平台上开发,整车实车控制软件在Matlab/Simulink/Stateflow和D2P工具包Motohawk平台上开发,图6为等效系数λ=1800时的整车仿真结果和道路试验结果对比图。
图6(a)为选取的随机工况,包括需求转矩和车速随时间的变化曲线。由需求转矩曲线可知,整个过程中包括了起动、加速、急加速和减速等阶段。图6(b)对比了在此随机工况下发动机输出转矩的仿真值和道路试验值。图6(c)对比了在随机工况下电机输出转矩的仿真值和道路试验值。由图6(b)和图6(c)可见,除了在发动机起动和关闭过程外,发动机和电机输出转矩的仿真值和试验值基本一致,在发动机起动和关闭过程中,发动机输出转矩的试验值要稍微滞后发动机输出转矩的仿真值,这是因为仿真过程中未考虑模式切换,而实车的控制软件考虑了模式切换,试验结果中的发动机输出转矩相对于仿真结果中的发动机输出转矩的滞后时间即为模式切换时间。在图6(c)中,在发动机起动过程中,试验结果中的电机输出转矩会出现一个峰值,而仿真结果中没有,这是因为由纯电动切换到纯发动机驱动的模式切换过程中,电机需要提供比较大的补偿转矩。总的来说,整车道路试验结果与仿真结果基本吻合,说明本文中提出的控制策略实时性好,可应用于实车的能量管理控制。
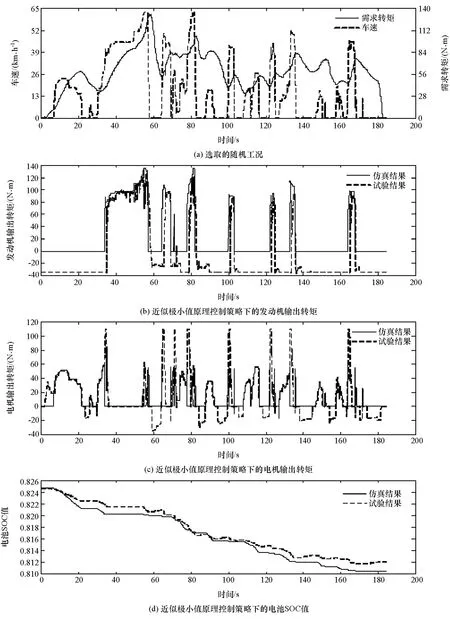
图6 近似极小值原理的仿真结果与试验结果对比图
图7 为整车仿真结果与道路试验结果中发动机工作点对比图。由图可见,仿真结果中的发动机工作点和试验结果中发动机工作点基本处于同一区域,且该区域总体为经济工作区,表明本文中提出的控制策略能合理地分配发动机和电机转矩。
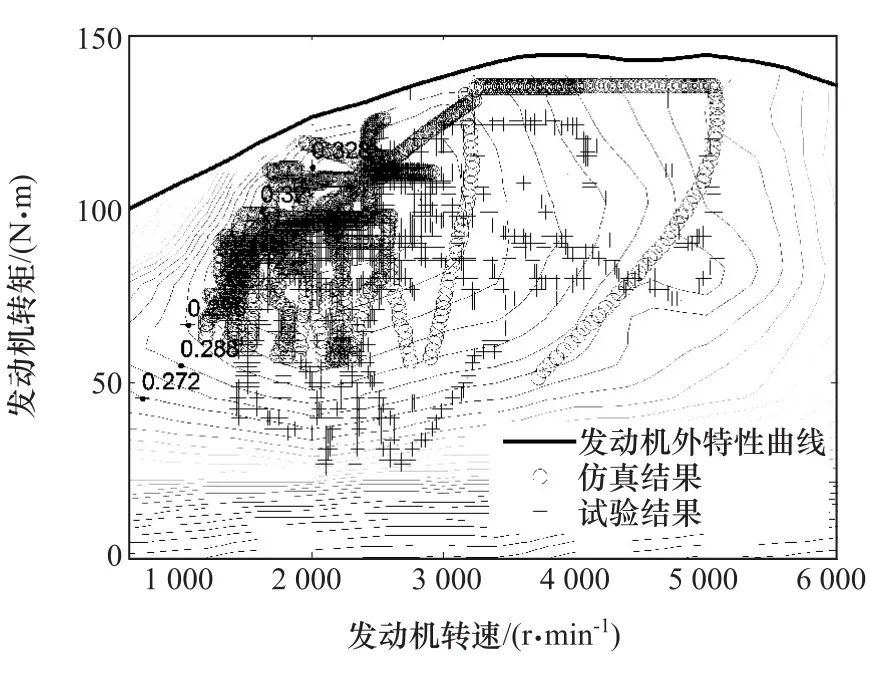
图7 发动机工作点
3.2 基于规则CD-CS模式控制策略和基于近似极小值原理控制策略的整车对比道路试验结果分析
根据国标GB/T 19753—2013《轻型混合动力电动汽车能量消耗量试验方法》,整车的燃油经济性通常是在底盘测功机上进行多个循环行驶工况测试来评价,但由于试验条件限制,本文中用实际道路试验来代替国标中的底盘测功机模拟试验。
为便于对比,同时开发了基于规则的CD-CS模式控制策略的整车控制软件,在此基础上,按照相同的试验要求和步骤对两种控制策略进行对比试验。
试验前,车辆在20~30℃的温度条件下的室内放置,直到发动机的润滑油和冷却液温度与室温之差在±2℃范围内。车辆在室内放置期间,使用车载充电器对电池组进行充电,直至电池组完全充满,然后在校园内选择一个路段进行道路试验,用车载油耗仪记录发动机的油耗,试验结果如表2所示。由表可见,与基于规则的CD-CS模式控制策略相比,基于近似极小值原理控制策略的整车燃油消耗降低了22.98%,表明基于近似极小值原理控制策略具有较好的燃油经济性。
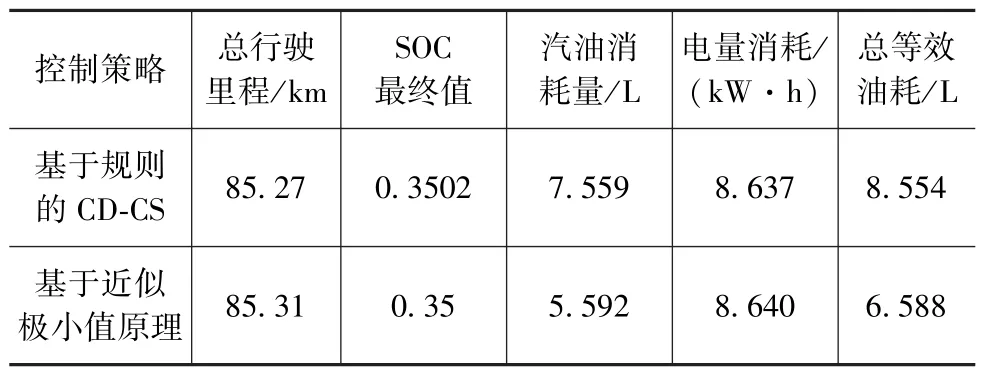
表2 两种控制策略下的道路试验结果
3.3 不同等效系数下的整车道路试验结果分析
图8为在同一路况下等效系数λ分别为1 200,1 800和2 000时的转矩分配和电池SOC变化曲线。初始SOC为0.9,设定基于近似极小值原理控制策略下的SOC最低值为0.82,SOC低于0.82进入CS模式,即电量维持模式。由图8可见,a1,b1和c1为整车工作在近似极小值原理控制策略模式,而a2,b2和c2为整车工作在CS模式。随着等效系数λ的增加,发动机参与工作的比例增加,整车工作在近似极小值原理控制策略模式下的行驶里程增加。由图8(d)可知,在λ=1200,λ=1800和λ=2000时,整车工作在近似极小值原理控制策略模式下的行驶里程分别为 Sa=4.78km,Sb=8.18km 和 Sc=13.53km。因此,等效系数λ需根据电池SOC值、行驶里程和路况参数进行在线调整。

图8 在不同等效系数下的转矩分配及电池SOC曲线
4 结论
(1)本文中在获得发动机瞬时油耗和电池瞬时等效油耗模型的基础上,通过分析Hamilton函数,提出了基于近似极小值原理的插电式混合动力汽车控制策略,该策略将最优解的搜索区域由整个控制变量的容许可达集简化到5个搜索点,大大缩短了计算时间并减小了计算存储空间。
(2)在同一随机工况下,对本文中提出的控制策略分别进行了仿真和整车道路试验,仿真结果与道路试验结果能很好吻合,且发动机工作点基本都分布在其经济工作区,说明本文中提出的控制策略实时性好,能应用于实车能量管理控制,并能合理分配发动机和电机转矩。
(3)进行了基于规则CD-CS模式控制策略和基于近似极小值原理控制策略的整车对比道路试验,结果表明,与基于规则的CD-CS模式控制策略相比,基于近似极小值原理控制策略的整车燃油消耗降低了26.02%,表明基于近似极小值原理的控制策略具有较好的燃油经济性。
(4)道路试验还测试了整车在不同等效系数λ下的转矩分配情况,结果表明随着等效系数λ的增加,发动机参与工作比例增加,整车在近似极小值原理控制策略模式下的行驶里程增加。
[1] TULPULE P,MARANO V,RIZZONI G.Energy management for plug-in hybrid electric vehicles using equivalent consumption minimisation strategy[J].International Journal of Electric and Hybrid Vehicles,2010,2(4):329-350.
[2] ZHANG C,VAHID A.Real-time optimal control of plug-in hybrid vehicles with trip preview[C].American Control Conference(ACC),2010.IEEE,2010:6917-6922.
[3] GENG B,MILLSJK,SUN D.Two-stage energy management control of fuel cell plug-in hybrid electric vehicles considering fuel cell longevity[J].IEEE Transactions on Vehicular Technology,2012,61(2):498-508.
[4] HE Y M,CHOWDHURY M,PISU P,et al.An energy optimization strategy for power-split drivetrain plug-in hybrid electric vehicles[J].Transportation Research Part C:Emerging Technologies,2012,22:29-41.
[5] KIM N,ROUSSEAU A,LEE D.A jump condition of PMP-based control for PHEVs[J].Journal of Power Sources, 2011, 196:10380-10386.
[6] STOCKAR S,MARANO V,CANOVA M,et al.Energy-optimal control of plug-in hybrid electric vehicles for real-world driving cycles[J].Vehicular Technology, IEEE Transactions on,2011,60(7):2949-2962.
[7] ZHENG C,XU G,ZHOU Y.Realization of PMP-based power management strategy for hybrid vehicles based on MPC scheme[C].Information Science and Technology(ICIST),2014 4th IEEE International Conference on.IEEE,2014:682-685.
[8] ONORI S,TRIBIOLI L.Adaptive pontryagin's minimum principle supervisory controller design for the plug-in hybrid GM chevrolet volt[J].Applied Energy,2015,147:224-234.
[9] GONG Q,LI Y,PENG Z R.Trip-based optimal power management of plug-in hybrid electric vehicles[J].Vehicular Technology,IEEE Transactions on,2008,57(6):3393-3401.
[10] MOURA SJ,FATHY H K,CALLAWAY D S,et al.A stochastic optimal control approach for power management in plug-in hybrid electric vehicles[J].Control Systems Technology,IEEE Transactions on,2011,19(3):545-555.
[11] SHAMS-ZAHRAEI M,KOUZANI A Z,KUTTER S,et al.Integrated thermal and energy management of plug-in hybrid electric vehicles[J].Journal of Power Sources,2012,216:237-248.
A Study on Real-time Control Strategy for a Plug-in Hybrid Electric Vehicle Based on Approximate Pontryagin's Minimum Principle
Zeng Yuping1&Qin Datong2
1.Nanchang Institute of Technology, The Jiangxi Province Key Labruary of Persision Drive and Contorl, Nanchang 330099;2.Chongqing University, The State Key Laboratory of Mechanical Transmission, Chongqing 400044
The instantaneous fuel consumption of engine is fitted with a piecewise function consisting of a linear function and a quadratic function,while the instantaneous equivalent fuel consumption of battery is fitted with a piecewise function consisting of two quadratic functions.On this basis, through the analysis of Hamilton function,and according to the properties of convex function,a control strategy based on approximate minimum principle is proposed,which shortens the optimization time by reducing the search space of optimal control variables.Then both simulation and vehicle road test are conducted on the control strategy with a chosen section of random driving condition,and a vehicle test to compare rule-based CD-CS mode control strategy and the control strategy based on approximate minimum principle is performed.The results of simulation and vehicle road test show that the control strategy based on approximate minimum principle has a better real-time performance and can be applied to the real time energy management control of vehicle with also a better fuel economy:its equivalent fuel consumption is around 23%lower than that with rule-based CD-CSmode control strategy.
10.19562/j.chinasae.qcgc.2017.09.005
∗国家自然科学基金(51665020)、重庆大学机械传动国家重点实验室2016年开放基金(SKLMT-KFKT-201617)和江西省教育厅科学技术项目(GJJ161123)资助。
原稿收到日期为2015年4月20日,修改稿收到日期为2016年12月18日。
曾育平,博士,E-mail:zengyp198410@163.com。
