基于GPS和里程计的列车定位方法*
2017-08-30陶汉卿蔡煊吴昕慧
陶汉卿蔡煊吴昕慧
基于GPS和里程计的列车定位方法*
陶汉卿1蔡煊2吴昕慧1
(1.柳州铁道职业技术学院电子技术学院,545616,柳州;2.西南交通大学牵引动力国家重点实验室,610031,成都//第一作者,讲师)
列车测速轮对的空转/滑行和车轮磨损是影响车载里程计(ODO)测速、测距精度的主要原因。针对该问题,通过传感器定位特性分析,在列车里程计基础上引入GPS技术,构建车载组合定位系统。通过GPS和ODO的信息融合,建立空转/滑行和车轮磨损的检测与误差校正计算模型,完成相关检测和误差校正。仿真试验结果表明,所提出的列车定位方法是有效的,可以提高车载定位系统的自主定位能力。
列车定位;全球定位系统;里程计;轮对空转;轮对滑行;车轮磨损
First-author′s addressSchool of Electronic Technology,Liuzhou Railway Vocational Technical College,545616,Liuzhou,China
列车定位子系统是轨道交通列车运行控制系统的重要组成部分,列车定位子系统提供的列车即时速度和位置信息是实现列车有效控制的基本参数,定位信息是否精确、可靠直接影响列车行车安全和运营效率。随着我国高速铁路和城市轨道交通的快速发展,列车测速定位技术已成为列车运行控制系统的关键技术之一[1]。
里程计(ODO)成本低、技术成熟,是目前列车定位领域应用最为普遍的测速、测距传感器,但由于其安装在车轮轮轴上,通过测量车轮转速得到列车运行速度和走行距离,故直接受到车轮转动状况的影响。测速轮对空转/滑行和车轮磨损是造成里程计测速/测距误差的主要原因[2]。列车运行过程中轮对空转/滑行和车轮磨损无法完全避免,如何有效减少空转/滑行和车轮磨损对列车定位的影响,是基于里程计的列车定位方法必须要解决的关键问题[3]。
针对上述问题,传统解决的方式一般是采用轨旁辅助定位设备(地面应答器等)向列车提供精确位置信息,用以修正里程计的测距累积误差。但这种方式的缺点也很明显,即无法提供速度校正,且建设和维护成本高,不支持线路的动态配置变化[4]。随着列车运行控制技术的发展,如何在尽量减少轨旁辅助设备的情况下保证车载定位系统的精确、可靠和连续定位能力成为当前列车定位技术的研究热点[5]。显然,依靠单一的车载传感器无法实现这一目标,而采用多个不同类型的车载传感器构成组合定位系统可能是一种可行、有效的方法。
针对ODO测速、测距存在的固有问题,本文在现有的基于ODO的列车定位方法中引入GPS技术,构成一种较低成本和较高性能的车载组合定位系统。通过GPS和ODO的信息融合,建立轮对空转/滑行和车轮磨损检测及误差校正计算模型,实现对空转/滑行和车轮磨损的检测和误差校正,达到提高列车定位精度和可靠性的目的。
1 车载传感器组合方案
1.1 ODO定位
目前轨道交通中使用的ODO大多为轮轴脉冲传感器。本文采用车载HS221G1A型轮轴脉冲传感器,其测速范围为0~20 kHz,列车速度V和走行距离增量△S的计算公式为[6]:

式中:
N——车轮转一圈传感器发出的脉冲个数;
D——车轮直径;
Δn——本周期脉冲计数;
T——测速周期。
由式(1)、(2)可知,通过ODO测量列车速度和走行距离时,车轮直径是基本计算参数。随着列车运行里程增长,车轮会逐渐磨损导致轮径变小,如果一直不对设定的轮径值进行修正,则会导致列车速度和走行距离的计算误差增大,而且测距误差会累积增加。另外,由于ODO测量的是车轮转速,当列车正常运行时,车轮转速和列车走行速度相同;但当车轮发生空转/滑行时,车轮转速和列车实际走行速度之间会出现较大偏差,导致测速、测距误差显著增大。为提高ODO的测速、测距精度,在解算列车走行距离之前需要对空转/滑行进行检测并补偿脉冲计数误差,解算过程中需要对原设定的轮径值进行误差校正。基于ODO的列车定位基本流程如图1所示[7]。

图1 列车ODO定位基本流程
1.2 GPS定位
卫星导航系统是能够在全球范围内提供精确、实时导航定位信息的无线电导航系统,具有成本低、连续性好、机动性强、精度高等先天优势,其在是轨道交通列车定位技术中的应用是未来的发展方向。目前投入使用的卫星导航系统有美国的GPS、俄罗斯的GLONASS、中国的北斗导航系统等。由于我国的北斗导航系统尚未完善,因此本文仍然以GPS作为研究对象用于列车定位。GPS卫星定位采用伪距测量方式直接计算列车在三维空间坐标系中的绝对经纬度坐标,再结合轨道电子地图进行相应的换算即可得到列车在线路中的具体位置,列车走行距离增量计算公式如下[7]:

式中:
α1、β1——列车在前一周期的经纬度;
α2、β2——列车在后一周期的经纬度;
R——地球半径。
卫星定位不受轮对空转/滑行和车轮磨损的影响,其定位原理和误差来源都与ODO完全不同。卫星测速定位误差主要由星历误差、用户接收机测量误差、卫星信号传播延迟误差等造成,且其定位误差不累积,可以利用GPS提供的列车位置信息有效消除里程计的测距累积误差。由于单独依靠ODO无法提供列车的初始位置信息,传统方式一般是采用轨道电路或者应答器辅助里程计完成初始定位,而采用GPS和ODO组合的方式,通过GPS采集的绝对位置信息就可以得到列车的初始位置。本文采用了价格相对低廉的SUPERSTARⅡ型单频伪距卫星接收机[4],采样速率为1 Hz,定位精度不大于5 m。
ODO高频特性较好、低频特性较差,而GPS正好与之相反。利用ODO的高频输出可弥补GPS低频测量的不足和卫星信号受遮挡时无法准确定位的缺陷,依靠GPS的测量结果可以为列车提供类似应答器的绝对位置信息,及时消除ODO的定位累积误差。综上可知,二者具有较好的互补性,GPS和ODO是一种较为理想的车载传感器组合方案。采用GPS进行列车定位,可以对现有的基于ODO的列车定位方法进行有效补充,减少诸如应答器等地面设备,以较低的成本实现列车运行控制系统对列车定位的需求。
1.3 车载组合定位系统
对于GPS和ODO构成车载组合定位系统,采用2个ODO和2个GPS接收机的冗余配置以提高系统可靠性。以3取2车载ATP安全控制平台为例,车载组合定位系统硬件结构如图2所示。
2 传感器数据滤波修正模型
为了防止噪声干扰和误差因素导致模型计算误差增大,首先需要对ODO和GPS的测量数据进行滤波修正。
2.1 ODO测量数据滤波修正
由于轨面平整程度对安装在两轴上的ODO有影响,导致两轴的速度测量值存在差异从而导致测速不准确。通过对两轴的速度取平均值的方法可以有效消除此误差,计算公式如下:

式中:
vodo1(i)——第i周期ODO 1的计算列车速度;
vodo2(i)——第i周期ODO 2的计算列车速度;
vodo(i)——第i周期ODO的计算列车速度。然后对里程计的测速值做如下修正:

式中:
P——低通滤波参数,P=6;
vtrain(i-1)——上一周期列车运行速度。
ODO的测速值作为主要测速依据,当列车未发生空转/滑行时,vodo_train(i)即作为第i周期的列车速度vtrain(i)。根据式(5),并结合上一周期列车速度,可得根据ODO计算的本周期列车加速度为:

式中:
T——测速周期。
2.2 GPS测量数据滤波修正
对GPS的测速值修正如下:

式中:
vgps_train(i)——上一周期列车速度;
vgps(i)——本周期GPS计算列车速度;
P——低通滤波参数,P=7.5。
根据式(7),并结合上一周期列车速度,可得根据GPS计算的本周期列车加速度为:

3 空转/滑行检测及误差校正计算模型
3.1 算法原理
根据ODO获取的车轮转速信息计算列车的速度和加速度,根据GPS获取的列车速度信息计算列车速度和加速度,然后比较二者计算的列车加速度差异,判断是否发生空转/滑行。由于车载ATO主要功能是精确控车,对速度的安全性要求不高,如果列车未发生空转/滑行,则根据ODO计算的列车速度/位移作为车载ATO的速度/位移,同时考虑里程计的测量和计算误差,计算车载ATP的安全速度/位移;若列车发生空转/滑行,则根据上一周期列车速度和本周期GPS计算的列车速度计算本周期列车的速度/位移,以此作为车载ATO的速度/位移,同时考虑GPS的测量和计算误差,计算车载ATP的安全速度/位移。算法原理如图3所示。
3.2 检测及误差校正计算
目前实际应用中,空转/滑行的检测都是基于ODO进行的,通过比较不同周期的ODO测量值完成空转/滑行的检测,但仅根据ODO的测量数据不足以完全区分列车正常运行时的加速度改变和空转/滑行造成的加速度改变,因此,导致检测精度有限,容易产生误判。为了进一步提高空转/滑行检测精度,本文通过比较不同传感器得到的列车运动状态数据完成空转/滑行的检测。
对ODO和GPS的列车加速度计算值进行比较,利用加(减)速度检测法检测列车是否发生空转/滑行。采用低通滤波的方式对ODO和GPS的计算加速度差值进行计算,计算公式如下:
式中:
adif(i-1)——上一周期两个传感器的计算加速度差值;
P——低通滤波参数,P=2。
若该差值超过最大限定值(alimit),则认为列车发生了空转/滑行,即当adif(i)≥alimit时,判定列车发生空转/滑行;当adif(i)<alimit时,判定列车未发生空转/滑行。
当空转/滑行发生时,车载ATP根据上一周期的列车运行速度和位移,以及考虑GPS的测速误差,计算列车本周期的运行速度和走行距离:

式中:
verror1——GPS星历误差造成的测速误差;
verror2——用户接收机测量误差造成的测速误差;
verror3——卫星信号传播延迟误差造成的测速误差;
Strain(i-1)——截止上一周期的列车走行距离。
4 车轮磨损检测及误差校正计算模型
由于测速轮对随着列车的运行会不断磨耗导致轮径减小,因此,必须根据车轮磨损情况及时对轮径值进行修正,以减少车轮磨损造成的里程计测速测距误差。现有修正方式主要是利用信号发码频率变化、列车运行监控装置或司机手动按键来完成,但这些方式受人为因素影响较大,会引入较大误差[10]。由于GPS在正常工作时定位精度很高且不存在定位误差累积现象,故可通过下式计算得到新的轮径值:

式中:
ΔS——通过GPS测量的列车走行距离增量;
m——列车在运行△S过程中记录的车轮转数。
列车每运行1 km,进行一次轮径计算,得到新轮径值Dn,完成车轮磨损的检测。对于轮径误差的校正,采用判断每次计算得到的Dn与原轮径值D的差值δ=Dn-D是否大于D的1%的方法[10],若大于则用新值Dn替换原值D,若不大于则保留原值。
5 仿真验证
5.1 仿真环境
为了验证所建立的计算模型有效性,采用通过建立列车运动模型仿真模拟产生列车运行数据来进行验证。完整的VOBC(vehicle on-board controller)仿真测试平台搭建在实验室环境下,该平台由3取2结构的车载ATP、双机热备结构的车载ATO、ODO、GPS接收机、车辆动力学模型仿真软件、ATR(automatic train regulation)仿真软件、区域控制器仿真软件和人机交互界面DMI组成,平台结构如图4所示。
5.2 仿真结果及分析
设定列车初始轮径值为856 mm,轮径测量误差±1 mm,轮径线磨损速率为0.005 mm/s,采用ODO和GPS作为速度信号的采集输入,GPS数据采样周期为1 s,ODO数据采样周期为100 ms。列车初始位置为东经:104.06°、北纬:30.67°,以80 km/h向正东方向运行。对ODO单独定位和ODO/GPS组合定位分别进行仿真,仿真结果如图5和图6所示。

图2 车载组合定位平台硬件结构
从图5可看出,单独定位时的定位误差呈现随着列车运行逐渐增长的趋势,这是由于轮对空转/滑行和车轮磨损带来的模型计算参数误差所造成,依靠里程计自身无法克服。从图6可以看出,ODO/ GPS组合定位误差得到了很好的抑制,有效减少了轮对空转/滑行和车轮磨损对定位精度造成的影响。
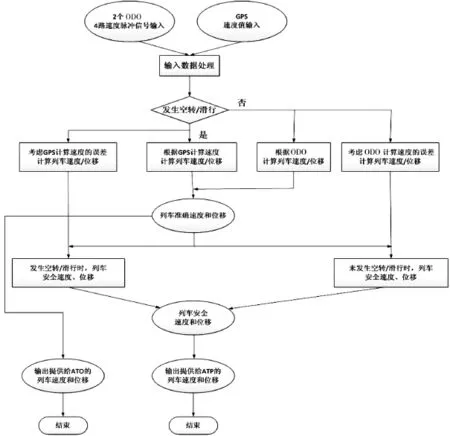
图3 算法原理流程图

图4 VOBC仿真测试平台

图5 ODO单独定位误差
仿真测试时,将定位系统中的轮径值设定为810 mm,列车每运行1 000 m进行一次轮径校正并记录校正结果,仿真结果如表1所示。
通过表1可见,当列车运行到5 000 m时,轮径计算值与初始轮径值(856 mm)的误差降低到初始值的1%以下;当列车运行到10 000 m时,轮径计算值与初始轮径值的误差已经降低到初始值的0.5%以下。可见随着列车运行里程的增长,轮径计算值逐渐接近真实值,证明了本文提出方法的有效性。

图6 ODO/GPS组合定位误差

表1 轮径校正结果
6 结语
针对列车运行过程中测速轮对空转/滑行及车轮磨损影响ODO定位精度的问题,根据GPS测速定位不受轮对空转/滑行和车轮磨损影响的特点,设计了一种GPS/ODO车载组合定位系统。在此基础上,建立了空转/滑行和车轮磨损检测及误差校正计算模型,实现了相关检测和误差校正。仿真实验结果验证了本文所提出方法的有效性,提高了车载定位系统的自主定位能力。为了进一步提高系统精度和可靠性,采用更高精度的差分GPS设备可更好地抑制列车空转/滑行时测速误差持续变大的趋势,采用齿数较大的车载ODO则可进一步提高未发生空转/滑行时的测速精度。
[1]刘宏杰.CBTC系统中列车安全定位方法的研究[D].北京:北京交通大学,2008.
[2]乔超,唐慧佳.列车里程计定位方法的研究[J].兰州铁道学院学报,2003,22(3):116-119.
[3]周达天.基于多传感器信息融合的列车定位方法研究[D].北京:北京交通大学,2007.
[4]殷琴,蔡伯根,王剑,等.GPS/ODO列车组合定位系统[J].现代电子技术,2010(19):168-171.
[5]ERNEST P,MAZL R,PREUCIL L.Train locator using inertial sensorsand odometer[C]//IEEE Intelligent Vehicles Symposium. Parma:2004:860-865.
[6]蔡煊,王长林,林颖.基于多传感器的列车空转及滑行检测与校正方法研究[J].城市轨道交通研究,2015,18(1):22-27.
[7]刘江,蔡伯根,王剑,等.基于灰色理论的列车组合定位轮径校准方法研究[J].铁道学报,2011,33(5):54-59.
[8]刘立月.基于GNSS的高速列车组合定位模型[J].实验室研究与探索,2011,30(10):46-48.
[9]蔡煊,王长林,林颖.基于轮轴速度传感器和加速度传感器的混合测速测距算法研究[J].城市轨道交通研究,2015,18(3):32-37.
[10]张辉.基于GNSS/ODO的列车定位方法研究[D].北京:北京交通大学,2008.
Train Positioning Method Based on GPS and ODO
TAO Hanqing,CAI Xuan,WU Xinhui
Wheel set slip/slide and wheel abrasion are the main causes to influence the speed and distance measurement accuracy of on-board ODO.Aiming at this problem,through sensor positioning performance analysis,GPS technology is introduced in on the basis of ODO to constitute a train integrated positioning system.By using the GPS/ODO integrated positioning system,a model for wheel set slip/slide,wheel abrasion detection and error correction is established,which could complete the correlation detection and error correction.Simulation results demonstrate the effectiveness of the proposed method,which can improve the independent positioning capability of vehicle on-board positioning system.
train positioning;GPS;odometer(ODO);wheel setslip;wheelsetslide;wheelabrasion
U284.48+2
10.16037/j.1007-869x.2017.08.031
2016-01-15)
*广西省高校科学技术研究基金项目(2013YB358);2016年度广西高校中青年教师基础能力提升题目(KT2016YB763)
