罐体横截面形状对液罐车侧倾稳定性影响分析
2016-04-27陈益苞SubhashRakheja上官文斌
陈益苞, Subhash Rakheja, 上官文斌
(华南理工大学 机械与汽车工程学院,广州 510641)
罐体横截面形状对液罐车侧倾稳定性影响分析
陈益苞, Subhash Rakheja, 上官文斌
(华南理工大学 机械与汽车工程学院,广州510641)
摘要:提出液罐车罐体截面形状设计方法,研究液罐横截面形状对半挂式液罐车侧倾稳定性影响,分析广泛使用的圆形截面液罐、改进的椭圆截面液罐及锥形截面液罐特点。提出两种改进的液罐截面形状,给出液罐中液体晃动产生的侧向力、侧倾力矩准静态条件的计算方法。以6轴半挂式液罐车为例计算液罐车模型的侧翻阈值、变道时横向负载转移及侧倾角响应峰值。基于准静态、动态两类指标分析该半挂式液罐车装载不同截面液罐时侧倾稳定特性。结果表明,两种改进的液罐截面形状可在较大充液比范围内提高液罐车侧倾稳定性。
关键词:液罐车;液体晃动;侧倾稳定性;联合仿真
79%的危险品由液罐车运输,而大多液罐车为半挂式[1]。事故统计表明,侧翻事故中83%由液罐车引起[2],说明液罐车较普通货车侧翻率更高,此因车罐与晃动的液体间相互作用所致[3]。部分充液罐车转弯时由于罐内液体晃动会对液罐产生附加力及力矩,会降低液罐车的侧倾稳定性[4]。液体晃动引起的附加力、力矩大小及其对车侧倾稳定性影响取决于罐车的行驶工况、车速、轴重、尺寸、充液比及液罐横截面形状等。诸多因素中液罐横截面形状及充液比对液体晃动及侧倾稳定性影响最大。
目前广泛使用的两种液罐为圆形及改进的椭圆形,改进椭圆液罐又分为水平轴对称、不对称两种结构形式。不同截面的液罐会对部分充液罐车产生不同侧倾特性[5]。充液罐车的侧倾特性主要取决于液罐液体质心高度及侧倾平面液面长度,此两因素亦决定侧倾力矩大小。圆形截面液罐因其宽度较小,液体晃动亦较小;改进的椭圆截面液罐因其宽度较宽,充液比相同时液体质心高度更低,但液体晃动会更大,尤其充液比低于70%时会显著降低液罐车的侧倾稳定性。研究表明,圆形截面液罐更适合低充液比下使用,改进的椭圆截面液罐适合高充液比下使用[6]。
针对传统圆形液罐质心高度较高及改进椭圆液罐液体晃动过大问题,林永智等[7-8]对矩形截面液罐及椭圆截面液罐形状进行改进,但改进后液罐宽度仍较宽,液体晃动仍较大。Kang[9]提出的优化锥形截面液罐具有改进椭圆液罐质心较低、圆形截面液面长度较小等特点,且可在一定充液比范围内提高液罐车侧倾稳定性,但液罐底部相对较平,不能与支撑座形状匹配,因此液体质心高度尚有进一步降低空间。
本文提出的2种改进的锥形截面液罐均满足容积、最大总宽度约束,且液体质心高度较低、液面长度较短,可提高液罐车侧倾稳定性,并通过不同充液比及侧向加速度下用准静态方法分析改进的锥形截面液罐与传统液罐质心转移特性及侧倾力矩特性。
液罐中液体的晃动为高度非线性,液体产生的最大压力及力矩可用流体动力学(CFD)精确计算[10],而准静态方法可快速计算出稳态的力及力矩[11]。为此,本文用准静态方法对装载不同液罐的半挂式罐车侧倾稳定性进行评估。液罐车模型搭建于TruckSim平台,由于TruckSim软件不能使货物质心转移,为此用TruckSim与Matlab联合仿真,将因液体晃动产生的力、力矩作为TruckSim模型输入。在相同负载下利用所建车-液罐系统模型通过仿真评估不同充液比下两种改进的锥形截面液罐及传统液罐的准静态、动态侧倾稳定特性。结果表明,本文的两种改进的锥形截面液罐较传统液罐,均可在较大充液比范围内提高罐车的侧倾稳定性。因此,本文建模方法及分析思路对改进、优化液罐横截面形状、提高罐车的侧倾稳定性具有指导意义。
1液罐模型
针对圆形截面液罐及改进的椭圆截面液罐各自缺点,Kang通过优化提出锥形截面液罐。该液罐底部接近平底,不能与向下弯曲的支撑座匹配,因此会增大液罐质心高度,对此,本文提出2种改进的锥形截面液罐,不仅满足国家关于液罐形状的规定,且具有可生产性。为分析液体质心转移及侧倾力矩大小,建立液罐横截面模型及侧倾平面准静态模型,分析、比较载荷相同时各充液比下2种改进的锥形截面液罐与传统液罐的优缺点。
1.1液罐截面形状表征
通用液罐横截面模型见图1,由8段圆弧组成,左右对称,相邻两段圆弧在交点处相切,每段圆弧的方程为

式中:Ri为i圆弧半径;Yci,Zci为i圆弧圆心坐标;H1为液罐总宽度;H2为液罐与支撑座总高度;Zl0为液罐充满液体时液体质心高度。
大部分液罐横截面形状均可用该模型表示。液罐为对称的改进椭圆截面液罐时,可令R1=R5,R2=R4(图1(a))。液罐为圆形截面液罐时可令R1=R2=R3=R4=R5;液罐为锥形截面液罐时(图1(b)),可通过改变R1~R5的任意值改变液罐宽度、高度及形状等。由于已使用的改进椭圆液罐由8段圆弧组成,锥形截面液罐相同,说明锥形截面液罐具有可生产性,仅各段圆弧半径不同而已。
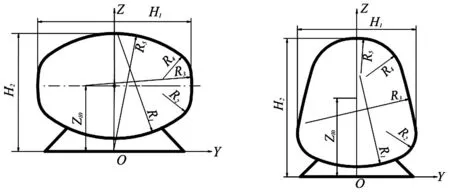
图1 液罐横截面模型Fig.1 Roll plane models of tanks
1.2液罐横截面模型设计方法
3种已用液罐横截面简图见图2(a),参数见表1。图中标出液罐充满液体时液体质心位置。3种液罐约束为:①液罐横截面积S=S0=3.258 6 m2,源于某款已生产的改进椭圆截面液罐;②总宽度H1不大于国家规定值2.5 m[12];③液罐支撑座相同且底部在同一平面上。A、B、C液罐横截面对比见图2(b)。A为圆形截面液罐,总宽度H1较小,故在侧倾平面的液面长度较短,利于减小液体晃动。B为对称的改进椭圆截面液罐,其上下两部分关于水平轴对称,较A液罐其总宽度H1大,液体质心较低,但液体晃动也较大。C为非对称的改进椭圆截面液罐,与B液罐区别在于其上下部分关于水平轴不对称,顶部半径较底部大,可一定程度降低液罐质心高度Zl0。
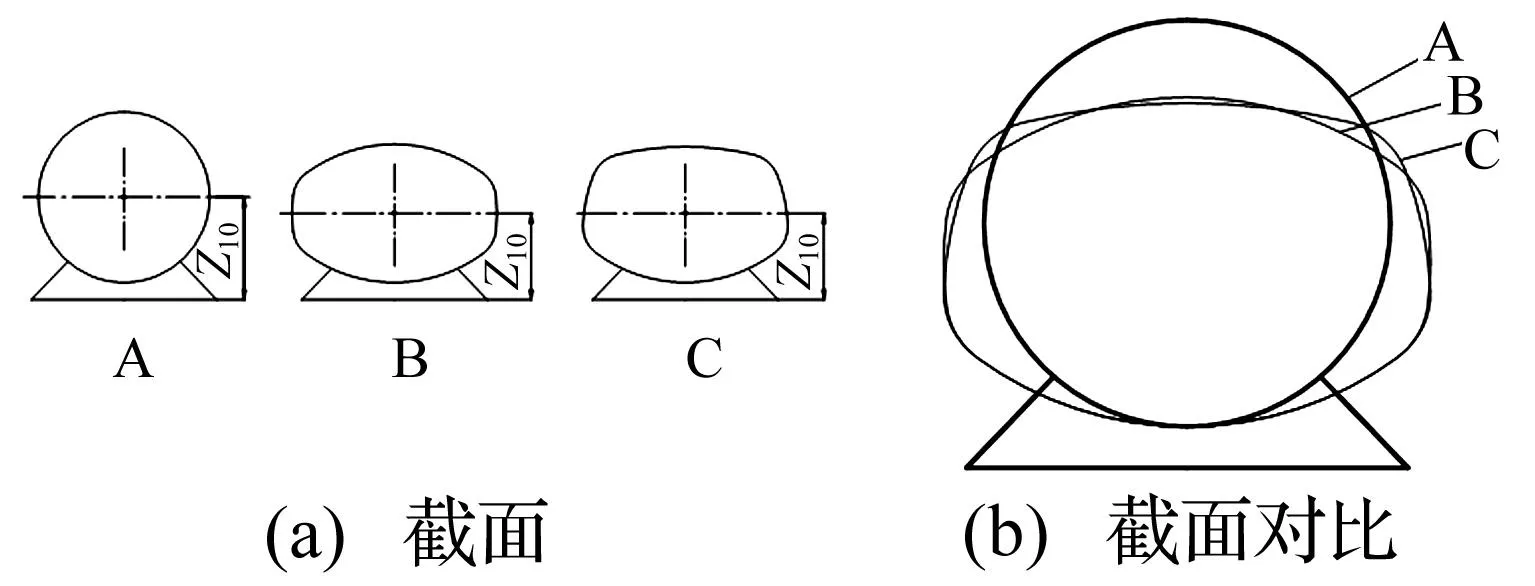
图2 液罐横截面简图Fig.2 Schematics of tank cross-sections
D、E、F液罐横截面对比见图3,约束同A,B,C,参数同表1。D液罐是Kang通过优化得出的液罐形状,其特点为上窄下宽,称为锥形截面液罐。下部分较宽,H1基本达到国家规定最大值,利于降低液体质心高度;上部分较窄可减小液面长度,从而减小液体晃动。研究表明,D液罐在一定充液比范围内可提高罐车侧倾稳定性;但其底部较平,不能与支撑座向下弯曲形状匹配,会提高整个液罐高度。
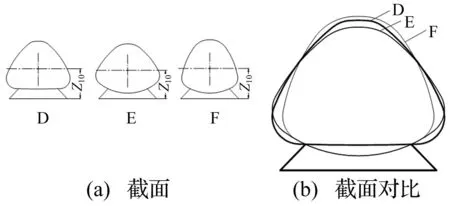
图3 锥形液罐横截面简图Fig.3 Schematics of reuleux triangle tank cross-sections
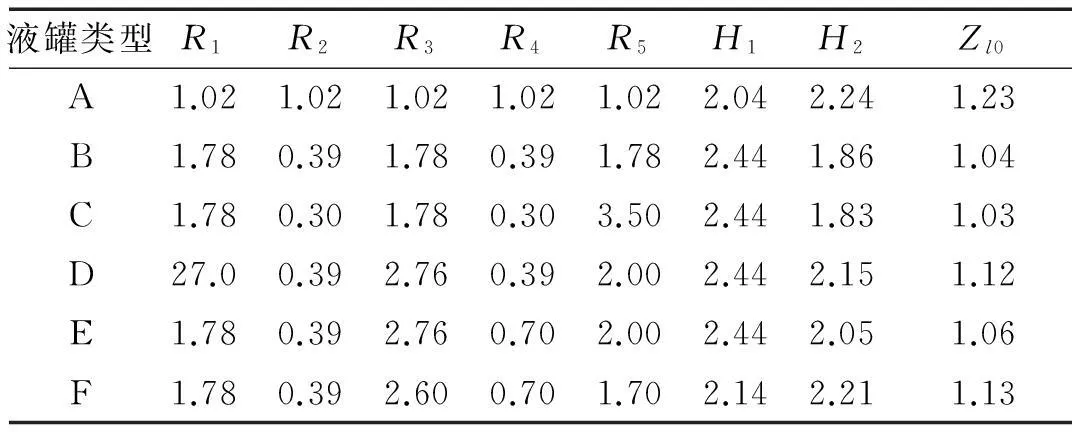
液罐类型R1R2R3R4R5H1H2Zl0A1.021.021.021.021.022.042.241.23B1.780.391.780.391.782.441.861.04C1.780.301.780.303.502.441.831.03D27.00.392.760.392.002.442.151.12E1.780.392.760.702.002.442.051.06F1.780.392.600.701.702.142.211.13
对此,本文提出在D液罐基础上改进的E液罐,其S,H1同D液罐。将E液罐底部圆弧半径R1由2.7 m改为1.78 m等于支撑座圆弧半径(图3),并调整液罐参数。建立S的表达式。需先确定该液罐模型的独立设计变量,本文R1~R5及Yc3、Zc3、Zc5作为独立设计变量。由于液罐的对称性,Yc1=Yc5=0。Zc1=R1+Zb,Zb为液罐底部到支撑座底部高度,本文选Zb=155 mm。
圆弧2因与圆弧1、3相切,圆弧2圆心坐标Yc2、Zc2可通过联立方程求出,即
(2)
Yc4、Zc4也可通过相同方法求出。圆弧i与圆弧i+1交点Yi、Zi(i=1, 2,…, 5)可由联立该两段圆弧方程求出。
由于液罐最宽处切线与Z轴平行,当某圆弧圆心纵坐标Zci(i=2, 3,4) 在Zi-1与Zi之间时,液罐总宽度为
H1=2(Yci+Ri)
(3)
液罐横截面积S表达式为
(4)
式中:fi(z)为液罐右边圆弧横坐标y关于z的函数,表达式为
(5)
由于圆弧3质心坐标(Yc3,Zc3)对S及H1均影响较大,除R1外保持其它设计变量与D液罐相同,用迭代法求出Yc3、Zc3的值,迭代约束为
(6)
式(6)中α值不能太小,否则会无解,且耗时。通过微调R4大小及圆弧5圆心纵坐标Zc5使E液罐的S及H1同D液罐,从而获得横截面形状。
由图3(b)可知,E液罐较D液罐,其底部多出部分弓形容积,因S保持不变,使液体质心高度降低;但其上部保持锥形,故称改进的锥形截面液罐,并利于减少液面长度。而在低充液比下液罐宽度仍较大。对此,本文在E液罐基础上改进F液罐。由于E罐H1= 2.44 m,A罐H1=2.04 m,为使F罐具有较小宽度,且不使液体质心过高,取F罐H1=2.14 m,并保持S及R1与E罐相同。由于F罐H1变小,若只改变Yc3及Zc3大小,较难求出其解,因此同时改变R3、Yc3、Zc3、Zc5的值,其它变量与E罐相同。迭代约束为
(7)
通过调节R5的值使F罐S=S0,可见F液罐底部与E液罐相同(图3(b)),能与支撑座形状相匹配,并有效降低液体质心高度,且H1明显小于D、E液罐,利于减小液体晃动,尤其在低充液比下。
由表1知,6个液罐中A罐Zl0最大,B、C的Zl0小很多,此因B、C的H1较A罐大。由于C罐上部分较B罐宽,其Zl0较B罐更小。D罐的Zl0介于A、B之间,因其在液体质心高度与液体晃动间妥协的结果。E液罐Zl0较D液罐小,因其在D罐基础上增加底部与支撑座相匹配的弓形部分,从而降低液体质心高度。F液罐的Zl0几乎与D液罐相同,但其宽度H1显著小于D液罐,可有效减小液体晃动。
1.3液罐在侧倾平面准静态分析
液罐在侧倾平面的准静态模型见图4。其中Wl为液体货物所受重力,单位N;ay为侧向加速度,单位g;θ为液罐侧倾角,单位度。坐标系ΣOYZ原点O位于支撑座底部中心,Z轴与液罐垂直对称轴相重合,Y轴向右。Cl0为不考虑液体晃动时货物质心位置;Cl(坐标Yl,Zl)为考虑液体晃动时货物在侧向加速度ay及侧倾角θ共同作用下液体质心位置。由图4看出,由于液体的晃动,货物质心发生偏移。A、B分别为液面线与液罐交点;h0为液面线在Z轴的截距。

图4 液罐在侧倾平面的准静态模型Fig.4 Roll plane model of the tank vehicle
液体所受侧向力为
Fyl=Wlay
(8)
液面线AB方程为
z=ky+h0
(9)
式中:k为液面线斜率,计算式为
(10)
此时罐内液体质心坐标为

(11)
式中:Q为积分区域,即液面线与液罐下方所围区域;Af为区域面积。
由图4,晃动液体关于坐标原点O的侧倾力矩为
Mxl=Wl[(Ylcosθ-ayYlsinθ)+
(Zlsinθ+ayZlcosθ)]
(12)
当Wl相同时,令Lxl=Mxl/Wl,则有
Lxl=Ylcosθ-ayYlsinθ+Zlsinθ+ayZlcosθ
(13)
式中:Lxl称为有效侧倾力矩臂,意义与侧倾力矩Mxl相同,但不受载荷大小影响,只与液体质心位置、挂车侧倾角及侧向加速度有关。
2侧倾稳定性评价指标
为分析液罐横截面形状对车侧倾稳定性影响,本文从两方面对车的操纵稳定性进行测量、评估。即①准静态评价指标:有效侧倾力矩臂Lxl(其值越小液体晃动产生的侧倾力矩越小)及准静态侧翻阈值SRT (Static Rollover Threshold);②动态评价指标:负载转移率LTR(Load Transfer Ratio)、挂车侧倾角最大值θ2max、挂车侧倾角速度最大值δ2max。两类指标中SRT、LTR、θ2max、δ2max是评价重型商用车操纵稳定性通用指标。
SRT测试方法有两种,即通过侧倾平台及稳态转弯测出[13]。用侧倾平台测量时定义为随侧倾平台侧倾角增大,第二轴外侧轮胎垂直负荷为0时侧倾角正切为SRT值。通过稳态转弯测量SRT方法为:车辆以100 km/h行驶,以2°/s速率增大转向轮转角,直到第二轴外侧轮胎垂直负荷为0,此时半挂车侧向加速度为SRT值,液罐车此时为临界侧翻状态,其值越大说明液罐车侧倾稳定极限越好。本文取第二种,因该方法更符合实际。
测量LTR工况采用轨迹跟踪法单移线行驶,车速88 km/h,运行轨迹见图5[14]。
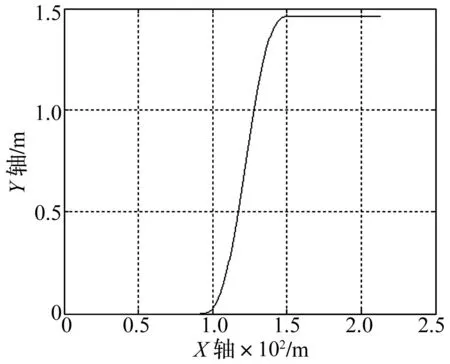
图5 单移线行驶路径Fig.5 Path coordinates of single lane change
LTR的值为
(14)
式中:FLi,FRi为第i轴左、右车轮垂直负荷。
由式(14)看出,LTR值越小车辆越稳定。车辆在平面上静止时LTR=0;LTR=1时车辆处于临界侧翻状态。
3液罐车侧倾稳定性分析
3.1液罐车系统建模
为测量、评估液罐车的SRT及LTR,建立某款6轴半挂式液罐车准静态联合仿真模型,见图6。在TruckSim软件中建立车辆模型,由于TruckSim中货物模型为刚体,质心位置不能变动,故通过TruckSim与Matlab联合仿真反映准静态下液体晃动对车的影响。仿真的每个步长TruckSim均输出液罐车动态响应,并将挂车的侧向加速度Ay2、侧倾角θ2输入Matlab的液体晃动模型中,通过计算获得液体晃动产生的侧向力Fyl及侧倾力矩Mxl,并输入TruckSim车辆模型。
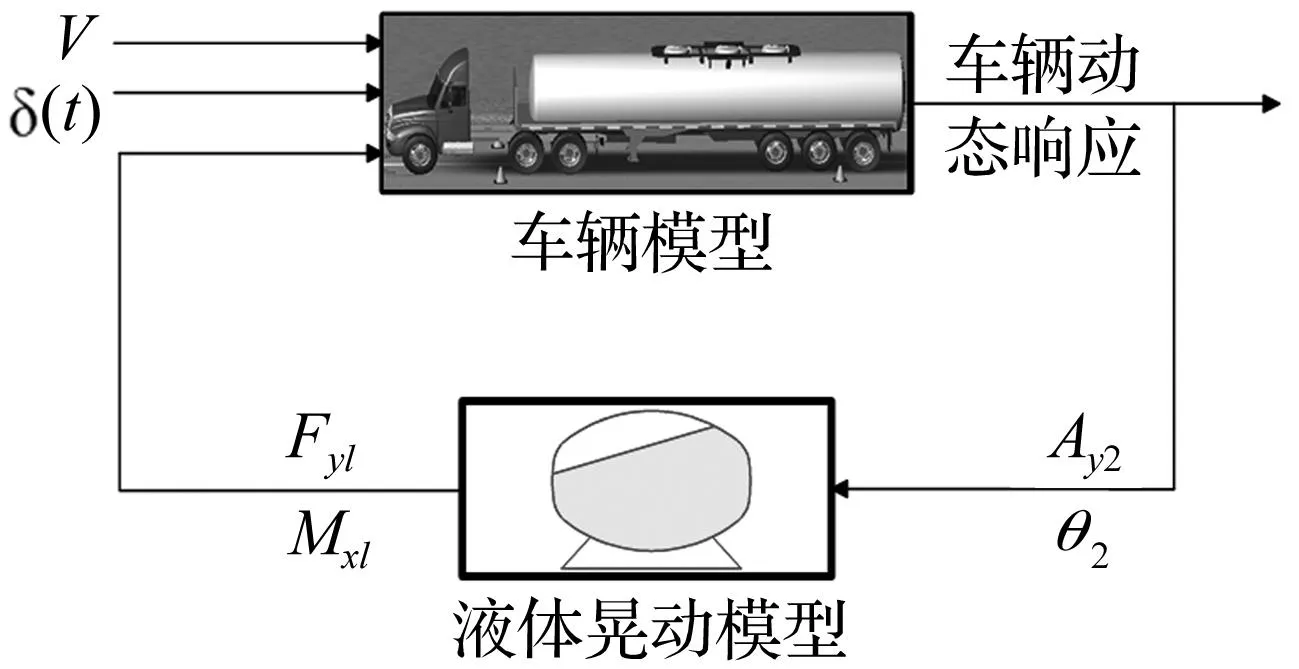
图6 液罐车准静态联合仿真流程Fig.6 Flow chart of Quasi-static co-simulation of tank vehicle
车辆模型建立于TruckSim平台,包括牵引车、挂车及货物模型,基本参数见表2,其中圆形液罐满载时的侧倾转动惯量Ixl据液罐横截面形状及充液比计算,近似等于静态时货物关于其质心的侧倾转动惯量。质量取满载时货物重量。
车辆用轮胎模型为TruckSim自带、额定载荷3 500 kg的轮胎模型,轮胎纵向力、侧向力及回正力矩为滑移率、垂向载荷函数,其值由实验室或道路测得。所用悬架模型为TruckSim自带的钢板弹簧悬架。
3.2结果分析
设液罐侧向加速度为0.3 g,侧倾角为8°,6种液罐在不同充液比下的有效侧倾力矩臂Lxl见表3。由表3可知,A罐Lxl不随充液比变化;而B、C罐Lxl随充液比增大而减小,因液面长度随充液比增大而减小,从而减小液体晃动。D、E、F液罐Lxl在充液比40%~80%之间亦随充液比增大而减小,但在100%充液比的值较80%大,此由液体质心高度增大所致。F液罐Lxl在40%~ 80%的充液比之间均最小,尤其80%充液比处,其值较A液罐减小12%。E液罐Lxl在60%~100%之间均小于平均值,与A液罐相比,其值在60%、80%、100%分别减小1.2%、11%、13%。
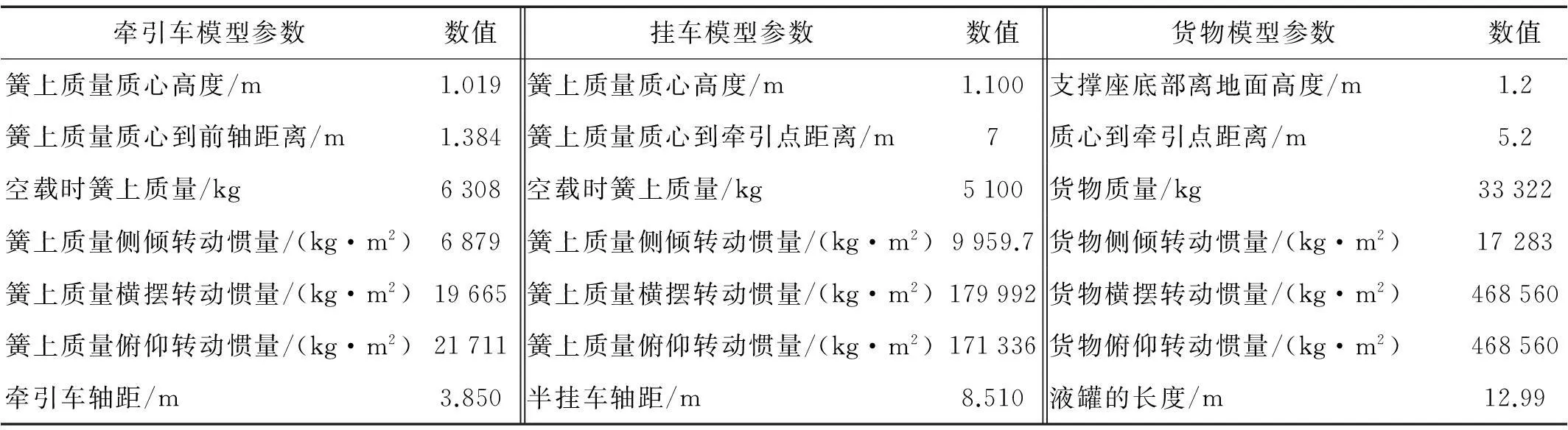
表2 液罐车模型参数
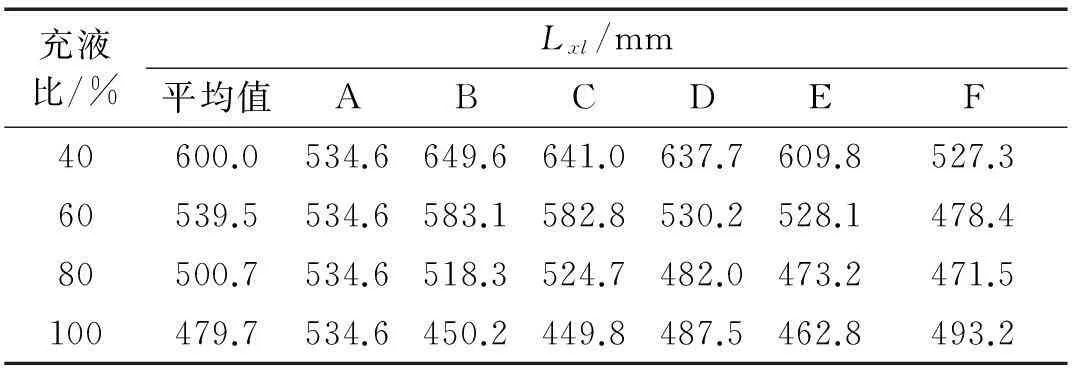
表3 有效侧倾力矩臂Lxl
6种液罐不同充液比的SRT值见表4。由表4知,A液罐SRT几乎不变,F液罐SRT在40%~80%的充液比之间为最大值,较A液罐其值在70%充液比下增大9%;E液罐在60%~100%充液比间SRT均大于平均值,与A液罐相比E液罐SRT在100%充液比下增大11%。因此,Lxl越小SRT越大,说明要提高液罐车的侧倾稳定性,设计液罐时需减小Lxl。
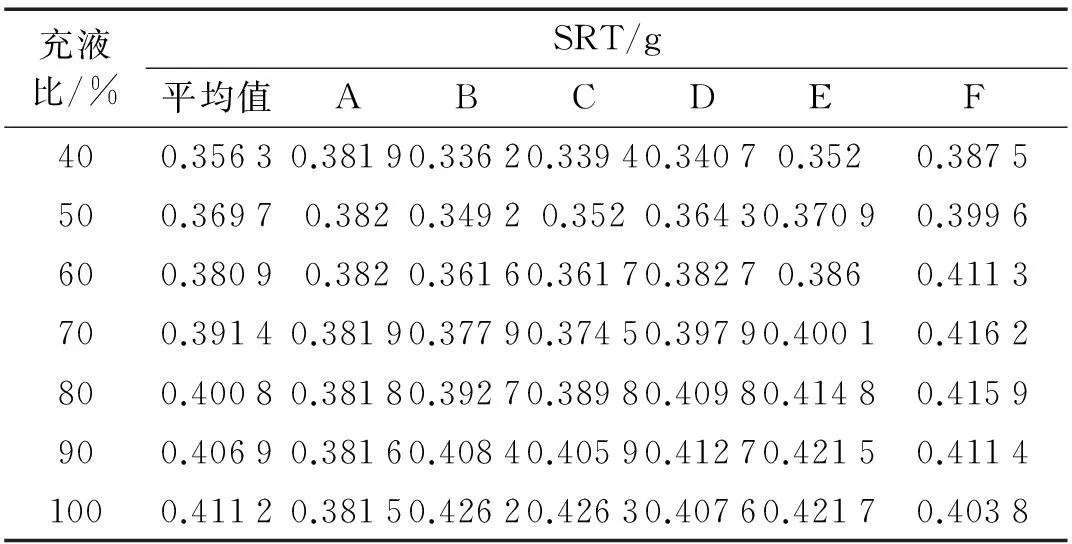
表4 侧翻阈值SRT
6种液罐在各充液比下最大值LTRmax见表5。该值反映液罐车负载转移的大小。由表5可知,A液罐LTRmax随充液比增大稍有增大,此由液罐侧倾转动惯量Ixl随充液比增大而增大所致。F液罐较其它5种液罐, LTRmax在40%~80%的充液比之间为最小值,尤其70%充液比下其值较A液罐减小8%。E液罐LTRmax在60%~100%充液比之间均小于平均值,与A液罐相比在90%充液比下其值减小7%。
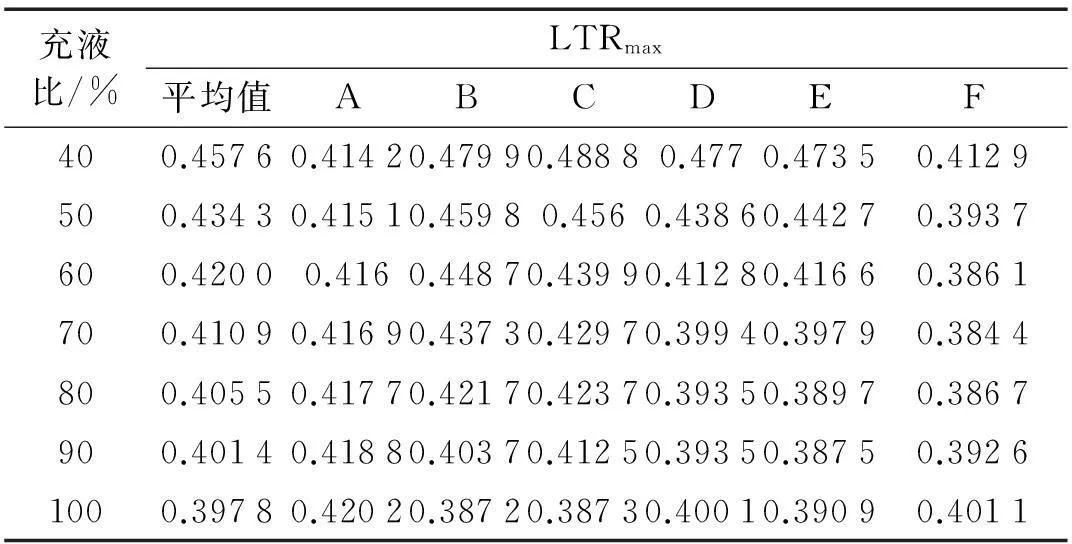
表5 负载转移率最大值LTRmax
6种液罐在不同充液比下半挂车侧倾角θ2max及侧倾角速度δ2max的最大值见表6、表7。可见F液罐θ2max、δ2max在40%~80%的充液比之间为最小值,与A液罐相比,其值在70%充液比下分别减小11%、14%。E液罐θ2max、δ2max在60%~100%充液比之间均小于平均值,与A液罐相比其值在90%充液比下分别减小12%、15%。与表5相比,θ2max、δ2max曲线与LTRmax相似。
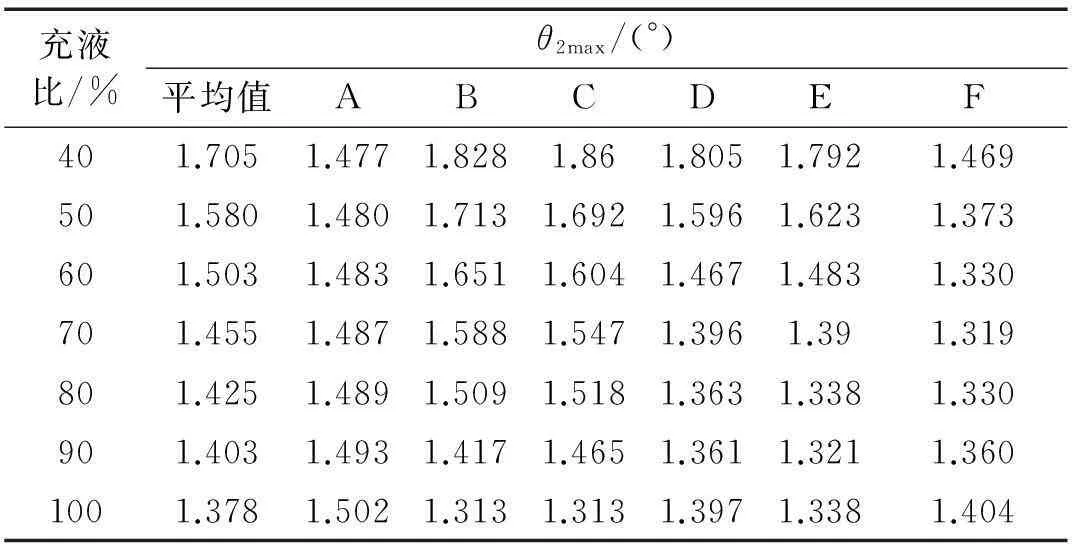
表6 挂车侧倾角最大值θ2max
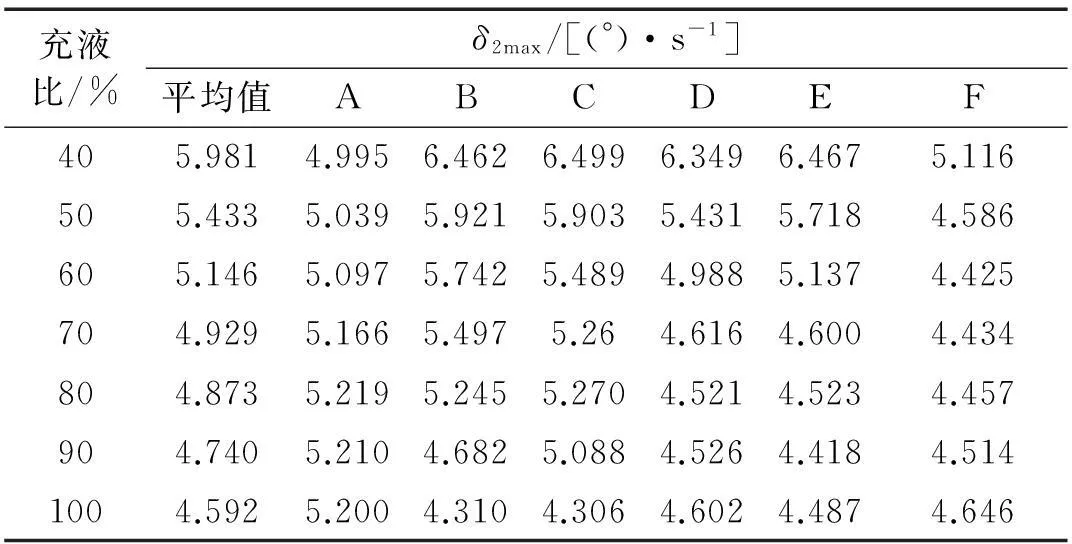
表7 挂车侧倾角速度最大值δ2max
通过对Lxl、SRT、LTRmax、θ2max、δ2max分析看出,E液罐在60%~100%充液比之间具有较小的Lxl、LTRmax、θ2max及δ2max值、较大的SRT值,说明更适合在中、高充液比下使用;F液罐在40%~80%的充液比之间具有最小的Lxl、LTRmax、θ2max及δ2max值、最大的SRT值,说明更适合在低、中充液比下使用。
4结论
通过建立半挂式液罐车准静态联合仿真模型,对液罐车侧倾稳定性仿真分析,结论如下:
(1)本文所用静态评价指标Lxl、准静态评价指标SRT、动态评价指标LTRmax、θ2max、δ2max均可表征液罐横截面对液罐车侧倾特性影响。
(2)负载质量一定时圆形液罐在所有充液比下,对液罐车侧倾稳定性影响几乎相同,可作为其它液罐的比较对象。
(3)E液罐因其底部可与支撑座形状匹配,故可降低液体货物质心高度,提高液罐车侧倾稳定性。E、F液罐均可在较大充液比范围内提高液罐车侧倾稳定性。
(4)本文对液罐车建模及液罐截面设计方法,对改进、优化液罐横截面形状,提高液罐车侧倾稳定性具有指导意义。
参 考 文 献
[1] Campbell K L. National estimates of the number of trucks, travel and accident experience of tractor semi-trailers used to transport hazardous materials[R]. State of Michigan: University of Michigan, 1989.
[2] Romero J A, Ramírez O, Fortanell J M, et al. Analysis of lateral sloshing forces within road containers with high fill levels[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2006, 220(3): 303-312.
[3] Kang X, Rakheja S, Stiharu I. Cargo load shift and its influence on tank vehicle dynamics under braking and turning[J]. International Journal of Heavy Vehicle Systems, 2002, 9(3): 173-203.
[4] Hu X, Li W, Sun L, et al. Liquid sloshing reduces driving stability of semi-trailer liquid tank[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(6): 49-58.
[5] Rakheja S. Estimation of rollover threshold of partially filled tank trucks[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 1991, 205(1): 69-71.
[6] Rakheja S, Ranganathan R. Estimation of the rollover threshold of heavy vehicles carrying liquid cargo: a simplified approach [J]. International Journal of Heavy Vehicle Systems, 1993, 1(1): 79-98.
[7] 林永智,陈铭年. 椭圆矩形液罐车截面曲线对横向稳定性的影响[J]. 机电技术, 2004, 26(B9): 175-178.
LIN Yong-zhi, CHEN Ming-nian. Effect of cross-section of modified-oval tank on tank vehicle roll stability[J]. Mechanical & Electrical Technology, 2004, 26(B9): 175-178.
[8] 李显生,郑雪莲,刘宏飞. 非满载罐式半挂汽车列车侧倾稳定性评价改进算法[J]. 吉林大学学报:工学版,2012,42(5):1089-1094.
LI Xian-sheng, ZHENG Xue-lian, LIU Hong-fei. Improved algorithm on roll stability evaluation of partially filled tractor-tank semitrailer[J]. Journal of Jilin University:Science Edition, 2012, 42(5): 1089-1094.
[9] Kang X. Optimal tank design and directional dynamic analysis of liquid cargo vehicles under steering and braking[D]. Montreal: Concordia University, 2001.
[10] 刘奎, 康宁. 罐车转向时液体晃动的仿真分析[J]. 北京航空航天大学学报, 2009, 35(7):799-803.
LIU Kui, KANG Ning. Simulation of liquid slosh in braking process of tank truck[J]. Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(7):799-803.
[11] Rakheja S, Ranganathan R, Sankar S. Field testing and validation of directional dynamics model of a tank truck[J]. International Journal of Vehicle Design, 1992, 13(3): 251-275.
[12] GB1589-2004,道路车辆外廓尺寸、轴荷及质量限值[S].
[13] El-Gindy M. An overview of performance measures for heavy commercial vehicles in north america [J]. International Journal of Vehicle Design, 1995, 16(4/5): 441-463.
[14] ISO 14791:2000,Road vehicles-Heavy commercial vehicle combinations and articulated buses-Lateral stability test methods[S].
Modified design and safety analysis of tank cross section based on roll stability
CHENYi-bao,RAKHEJASubhash,SHANGGUANWen-bin
(School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510641, China)
Abstract:The effect of tank cross-section on relative roll stability limits of a partially-filled tank trailer combination was investigated. The study includes the widely used circular and modified oval cross-sections in addition to a Reuleux triangle and two proposed modified Reuleux triangle cross-sections. The results were obtained for a six-axle tank-semitrailer combination using the TruckSim platform. The additional lateral forces and roll moment caused by the liquid cargo movement were evaluated using a quasi-static approach and integrated into the TruckSim model as an external force and a moment. The relative roll dynamic responses were evaluated, in terms of static rollover threshold, as well as the lateral load transfer and peak roll angle responses during a lane-change maneuver. The results suggest that the proposed modified Reuleux triangle cross-sections yield enhanced roll stability and roll directional performance over a wide range of fill levels.
Key words:tank vehicle; liquid sloshing; roll stability; co-simulation
中图分类号:U469.5
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.06.027
通信作者上官文斌 男,博士,教授,博士生导师,1963年生
收稿日期:2015-01-04修改稿收到日期:2015-03-30
基金项目:国家自然科学基金(51475171)
第一作者 陈益苞 男,硕士生,1991年生
E-mail:shangguanwb99@tsinghua.org.cn