空空导弹越肩发射侧向运动控制器设计
2015-07-09赵玉杰赵艳辉张公平
闫 亮,赵玉杰,赵艳辉,张公平
(中国空空导弹研究院,河南洛阳 471009)
误差e渐近趋近于0,可得出系统在滑模面上渐近稳定。证毕。
对横滚运动,可以设计滑模面为
0 引言
未来空战对空空导弹提出了更高的要求,能够实现以载机为中心的全向攻击,需要导弹应具有后向攻击能力,即越肩发射。导弹被载机发射攻击后半球的目标时,将进行敏捷转弯,在此过程中经历大攻角阶段。由于在此阶段,传统的气动力控制效率不足,不能使之快速敏捷转弯,因此需采用推力矢量装置或反作用喷气装置来提供控制力[1]。在文献[2]中已经研究了在俯仰平面内,导弹敏捷转弯时俯仰通道的控制系统设计。但由于大攻角阶段,不对称分离气流会产生诱导的侧向力、偏航力矩和滚转力矩[3],因此还须考虑偏航通道和横滚通道的控制系统设计。滑模控制对未建模特性具有很强的鲁棒性,结合大攻角阶段的气动特性,本文采用滑模控制方法,对空空导弹越肩发射过程的偏航/横滚运动进行控制器设计。
1 大攻角阶段的气动特性
大攻角气动问题主要表现在,低马赫数情况下脱体涡和高超声速情况下空气流的可压缩性影响,使得导弹在大攻角时的气动特性具有明显的非线性与非对称性特征[4]。其中,具有大长细比的导弹在大攻角时出现的非对称涡,可以诱导出较大的侧向力、偏航力矩和滚转力矩。同时,这种非对称涡与弹体尾部的气动面相互作用,使空气流动变得异常复杂。
从图1、图2中可以看出,侧向力和偏航力矩随舵偏角的变化很小,说明侧向力和偏航力矩主要的贡献来自于导弹的弹体及位于中部的狭长的极小展弦比弹翼。
文献[2]在设计俯仰平面内导弹越肩发射的控制器时,仅考虑了俯仰通道的控制器设计,没有考虑侧向运动。由于导弹在大攻角阶段会产生诱导的侧向力、偏航力矩和滚转力矩,因此需要对俯仰平面内导弹大攻角阶段的偏航运动和横滚运动进行控制,目的就是消除诱导侧向力、诱导侧向力矩以及诱导滚转力矩的影响,维持导弹侧滑角基本为零,并对滚转运动进行控制。
由于在大攻角阶段气动舵基本不起作用,因此在此阶段仅考虑采用直接力装置。

图1 亚声速时不同舵偏下侧向力随攻角的变化Fig.1 Lateral force changes with angle of attack under different elevator at subsonic

图2 亚声速时不同舵偏下偏航力矩随攻角的变化Fig.2 Yaw moment changes with angle of attack under different elevator at subsonic
2 侧向运动建模
偏航通道运动方程为:

式中α是攻角;β是侧滑角;ωx是滚转角速度;ωy是偏航角速度;ωz是俯仰角速度;δy是方向舵舵偏角;Frcs是反作用喷气装置产生的直接力;urcs是直接力装置的开关;Lrcs是直接力装置距离质心的距离;m是导弹质量;V是导弹速度;b1、b2、b3、b4、b5是气动力系数;Jx是滚转转动惯量;Jy是偏航转动惯量;Jz是俯仰转动惯量;Cz
′是诱导侧向力;M′y是诱导偏航力矩。
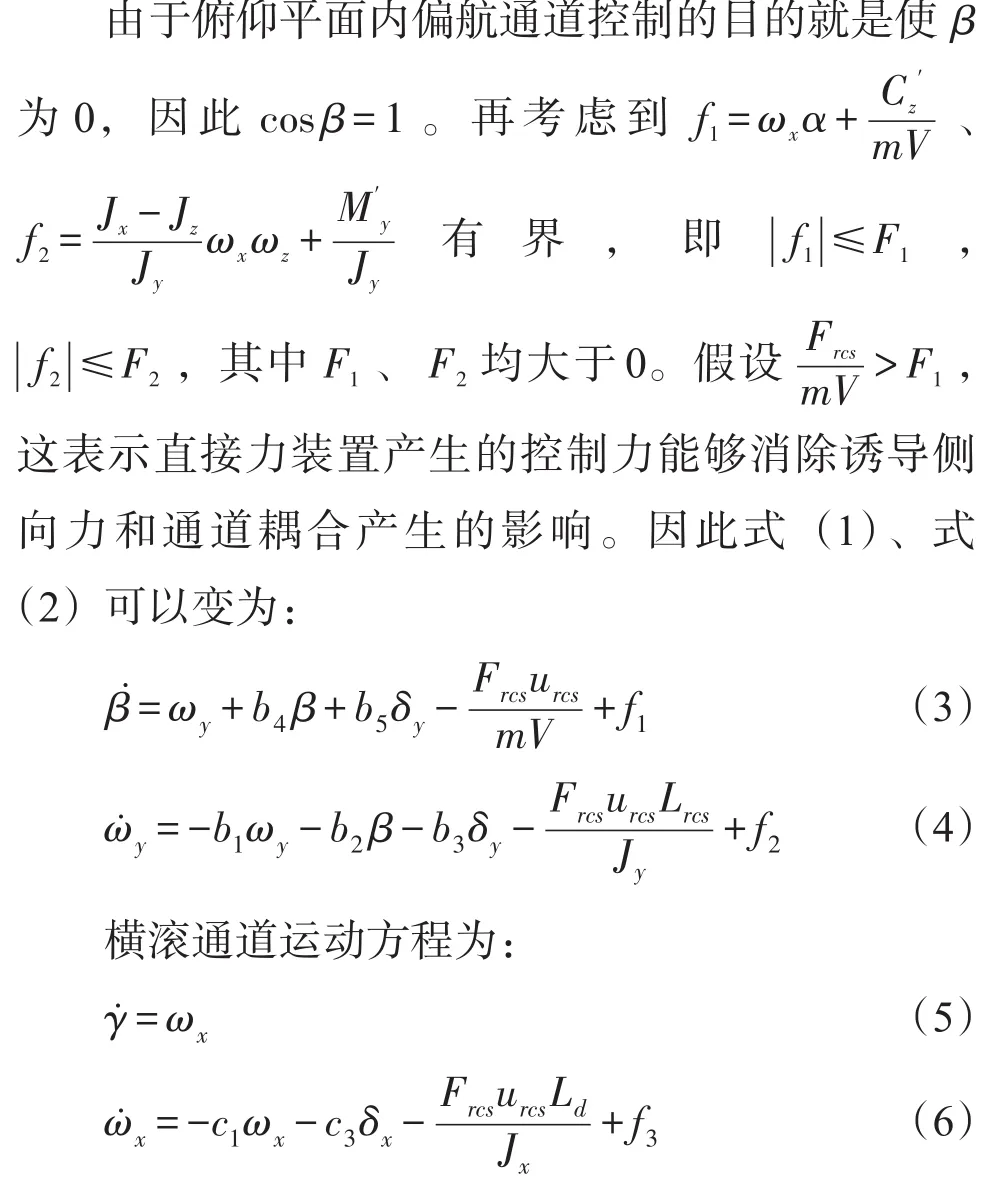
式中γ是滚转角;ωx是滚转角速度;c1、c3是动力学系数;δx是气动舵;Ld是横滚力矩的力臂;Jx是滚转通道转动惯量;f3是诱导滚转力矩产生的干扰,且 |f3|≤F3,F3大于0。假设>F,这表示直接力产生的控制力矩可以消
3除诱导滚转力矩的影响。
采用文献[5]中的直接力装置,可以产生滚转控制力矩,对横滚通道进行控制。如图3所示。

图3 反作用喷气装置示意图Fig.3 Schematic diagram of reaction jet device
3 侧向运动控制器设计
滑模控制的优点在于系统在滑模面上运动时,对参数摄动和干扰具有鲁棒性。结合上一节中系统方程,我们选择滑模控制理论进行偏航运动和横滚运动的控制器设计。
对偏航运动,根据文献[6]中的相关论述,本文设计滑模面为

式中,k1为设计参数,且k1>0。两边求导可得:

先令直接力开关urcs为0,可以得到等效控制,即气动力控制为

再取切换控制,即侧向直接力开关为

命题1:在等效控制(9)和切换控制(10)的作用下,系统(3)、(4)渐近稳定。
证明:取Lyapunov函数为

对式(11)两边取导可得

将式(8)代入式(12)可得

将式(9)、式(10)代入式(13),又由于

所以系统状态将向滑模面趋近。当系统在滑模面上运动时,有s=0,令:
误差e渐近趋近于0,可得出系统在滑模面上渐近稳定。证毕。
对横滚运动,可以设计滑模面为
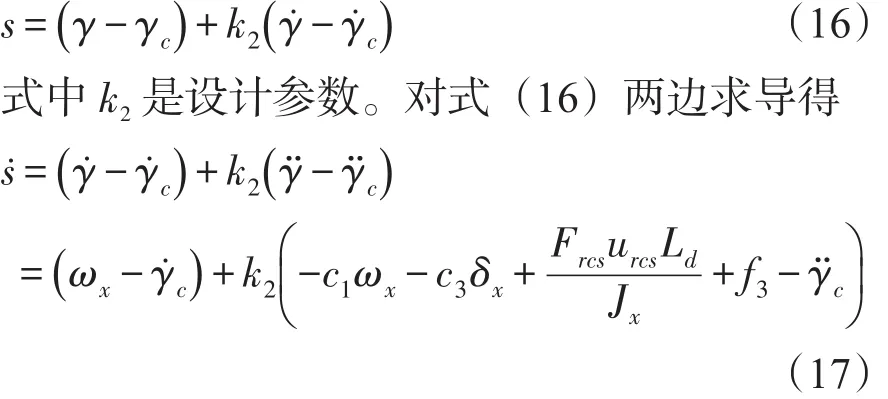
先令直接力开关为0,可以得到等效控制,即气动力控制为

再取切换控制,即横滚直接力开关为

同命题1的证明,在式(18)、式(19)的作用下,滑模面存在,且系统在滑模面上渐近稳定。
4 仿真结果
在仿真中,对气动舵的作用时间进行限制,在大攻角阶段令气动舵控制为0。结合前述研究结果,在俯仰平面内,导弹的姿态角变化如图4所示,那么认为在0.2s到1.5s之间气动舵偏为0。在大攻角阶段仅直接力装置工作。这么考虑的合理性在于系统在大攻角阶段之前已经进入滑模状态,如果系统状态偏离滑模面,在直接力的作用下系统状态向滑模面运动,维持滑动状态。这就对直接力装置的控制效果提出了要求,即系统在仅有直接力装置作用时,能够维持在滑模面上运动。大攻角阶段结束即1.5s之后,气动舵开始作用,如式(9)和式(18)所示,此时直接力装置不工作,即urcs=0。

图4 俯仰平面内导弹姿态角变化曲线Fig.4 Curve of the change of attitude angle in pitch plane
另外设计直接力装置的开关阈值来减小开关次数。开关阈值的设计与滑模面相关,如果|s|<ε,则认为直接力装置不作用,否则直接力装置工作。
偏航通道运动仿真结果如图5~图7所示。

图5 侧滑角变化曲线Fig.5 Curve of the change of sideslip angle

图6 偏航舵舵偏变化曲线Fig.6 Curve of the change of actuator deflection

图7 直接力开关曲线Fig.7 Switch of reaction jet control
从图5中可以看出,在大攻角阶段,侧滑角基本维持在零附近。
横滚通道运动仿真结果如图8~图11所示。

图8 横滚角变化曲线Fig.8 Curve of the change of roll angle

图9 横滚舵舵偏变化曲线Fig.9 Curve of actuator deflection of roll channel
图10 直接力开关曲线Fig.10 Curve of switch of reaction jet control
图11 横滚角速度变化曲线Fig.11 Curve of the change of roll angular velocity
从图11中可以看出,在大攻角阶段,横滚角保持不变,横滚角速度基本维持在0附近。
5 结论
本文研究了空空导弹越肩发射过程中偏航运动和横滚运动控制器设计的问题。结合大攻角阶段的气动特性,建立了包含不确定性的偏航运动方程和横滚运动方程。在此基础上,利用滑模变结构控制理论,分别设计了偏航运动和横滚运动的控制量。最后通过仿真研究,证明了采用直接力和气动力复合控制的方法可以满足大攻角阶段偏航运动和横滚运动的要求,消除了诱导侧向力、诱导侧向力矩及诱导横滚力矩的影响,使导弹的侧滑角、横滚角速度基本保持为0。
[1]Kevin A.Wise,David J.Broy.Agile missile dynamics and control[J].Journal of guidance,control and dynam ics,1998,5:441-449.
[2]闫亮,马克茂,董继鹏,等.采用直接力的空空导弹越肩发射控制设计[J].航空兵器,2013,6:3-8.
[3]曾广存.大攻角绕流非对称气动现象形成机理及抑制方案研究[C]//.空气动力学研究文集,第一卷:211-217.
[4]李东,侯清海.某型空空导弹大攻角测力风洞试验及分析[C]//.2009年院学术交流论文集:119-124.
[5]万东,何国强,王占利,等.针栓喷管技术在固体姿轨控系统中的应用研究[J].现代防御技术,2011,39(3):48-54.
[6]岳明桥,雷军委,李高鹏.采用一类积分型滑模的导弹控制系统设计[J].航天控制,2010,28(6):29-32.