一种管道测绘系统螺旋误差精密补偿方法
2015-07-09李海军裴玉锋冯庆善闫春星
李海军,裴玉锋,冯庆善,闫春星,李 睿
(1.北京自动化控制设备研究所,北京100074;2.中国石油管道公司,河北廊坊 065000)
0 引言
石油、天然气管道在服役期内,需要定期采用检测设备进行检修维护。管道测绘系统是管道检测设备的重要组成部分之一。其作用有:一,精确确定管道缺陷部位(金属探伤、漏磁检测等)的位置,以便维修作业[1-3];二,测量管道的相对形变以确定其目前是否正常。其中,管道相对形变测量的精度要求极高,一般需要达到厘米级才能精确地计算管道的曲率、曲率半径、相对位移等参数。
在管道测绘系统研制过程中发现,垂直于管道中心线方向的测量数据中存在规律性的测量误差,该误差随着测绘系统的行驶里程和滚动角呈螺旋状变化,变化的幅值可达分米级,因此会严重影响管道参数的测量精度。针对这一误差,将对其产生机理进行分析并给出误差模型和工程上的标定补偿方案,进行试验验证。
1 基本组成与原理
管道测绘系统主要由惯导系统、里程计以及用于位置修正的路标点组成。管道一般铺设在地底,很难通过有效的高精度定位装置对其具体位置以及管道轨迹进行精确测量。而惯导系统是一种相对有效的测量装置,具有全自主性等特点,但惯导系统定位精度随时间发散,因此需要通过里程计的数据利用组合算法对惯导系统的误差进行修正。
惯性/里程计组合导航方案是利用里程计提供的速度测量信息和惯导系统提供的姿态角信息进行航位推算[4],建立导航解算和航位推算的组合导航系统卡尔曼滤波模型,利用卡尔曼滤波进行最优滤波,得到测绘系统的各项误差值,并对其进行修正[5-7]。最后,利用Mark点处已知的高精度位置信息结合里程计航位推算结果对系统的导航误差进行修正,以进一步提高定位精度,从而完成对管道轨迹的精确测量。通常,如果只是为了对管道进行定位,则测量精度达到米级即可,而如果需要对管道的应力等参数进行计算,则在短距离内的测量精度需达到厘米级。
2 机理分析
由于管道测绘系统一次工作时间较长,为了防止在管道运行过程中支撑轮和里程轮出现单边磨损,通常通过设计手段,使系统在运行过程中不断进行旋转。测绘系统的旋转对Kalman滤波器来说,有利于提高惯导系统与里程计的各误差量可观测度,提高估计精度。但是由于惯导系统并不能保证放在管道中心,同时管道系统与测绘系统前进方向存在一定的安装误差,因此当系统进行旋转时,将影响测绘系统所获得的管道轨迹数据。
文献[1]中给出了惯导与里程计跑车试验时轨迹的测量精度为0.5m(1σ)左右,但是跑车试验不能真实模拟管道检测时的旋转状态,当检测装置旋转时,如果惯导系统安装的轴向与管道的走向存在安装误差角,则将额外引入旋转误差,该误差对管道的定位影响较小,而对管道应力、曲率半径等参数的计算将会产生影响,需要进行补偿。
图1给出了某次直线管道验证试验中惯导系统测量获得的滚动角曲线。由图中可以看出,测绘系统旋转了三圈左右。图2给出了测量获得的轨迹曲线,由图可见,测量轨迹中明显存在随测绘系统旋转的螺旋状的轨迹误差(以下简称为“螺旋误差”)。

图2 测量获得的轨迹曲线Fig.2 Track of pipeline
对于螺旋误差的产生原理,一般认为是惯导未安装在管道的中心线位置,测量出的螺旋曲线。但是通过对系统的工作原理和误差特性进行分析后发现,惯导相对里程计的安装误差,是造成螺旋误差的根本原因。当惯导系统轴向与系统的前行方向存在一定的安装误差时,在进行航位推算的过程中,将在侧向和垂向产生随滚动角交变的速度误差,积分后造成侧向和垂向随滚动角交变的位置误差,即螺旋误差。下面进行误差模型的详细推导。
里程计与惯导系统之间的安装误差关系如图3所示,其中dθ为Z轴向安装误差角,dψ为Y轴向安装误差角,dφ为综合安装误差角。

图3 惯导系统与里程计安装误差示意图Fig.3 Installation error between INS and odometer
设系统旋转的角速率为ω,速度为v,运行的时间为t。系统的垂向速度误差、侧向速度误差与旋转角度的关系为:

一般情况下,系统旋转的快慢与行进的速度正相关,即

式(2)代入式(1)可得:

对式(3)在时间t内进行积分,可得位置误差:

式(4)即为通过误差分析得到的螺旋误差的数学模型。其中,γt为t时刻的滚动角,Ky、Kz分别为两个方向的安装误差引起的螺旋误差振幅;根据误差产生原理和数学模型,可制定相应的标定补偿方案。
3 标定与补偿方案
如果惯导轴向与管道轴向之间没有安装误差角,则测量获得的轨迹将不会出现随滚动角变化的螺旋状误差,该螺旋误差对管道轨迹的相对变形的测量精度以及管道曲率半径等参数的计算有较大的影响,因此,需要进行精密补偿。下面讨论标定补偿方案。
对于特定的管道测绘系统来说,在完成组装之后,由于安装误差也随之固定,所以螺旋误差振幅基本为固定值。一种简易可行的标定方案如下:
1)设置一段水平放置的直线管道进行标定试验;
2)设置不同的初始滚动角进行多次测量计算,选取多个支撑点处(支撑点处管道不会因为自身重力而出现下垂)的位置为测量点,记录测量点处的高度值;
3)每次测量获得的高度值可按照式(4)得到高度误差方程(管道水平放置,垂向位置误差即高度误差);
4)根据多次测量获得的误差方程利用最小二乘法计算,获得螺旋误差因子Ky、Kz。
计算获得螺旋误差因子之后可以作为系统的一个参数在数据中进行补偿。令dSb=[dSbxdSbydSbz]T,其中:

在实际应用中,管道测绘系统需要在不同的管道内进行测量,如果测绘系统需要进场拆卸,则已经标定好的参数可能发生一定的变化;为提高系统在不同管道内的适用性,在进行了初始的误差补偿后,同时也将螺旋误差方程扩充到后处理程序的数学模型中,在程序处理过程中自动进行剩余误差估计和补偿,以进一步消除由于旋转引起的各种测量误差。
4 验证试验结果
为验证模型的正确性,采用实际系统,在某一管道内进行了验证试验,试验条件如下:
管道长度96.6m,里程计刻度系数2mm,惯导航向精度优于0.1°。试验时通过人为改变管道形状,每次通过改变垫块的厚度使管道高度变化5cm,以分析测绘系统对管道变形的测量精度。每种形状管道进行两次试验。管道位置测试情况入图4所示。

图4 管道轨迹测量时的位置示意图Fig.4 Position of Pipeline
如果不对螺旋误差进行补偿,则可得图5的垂向位置轨迹曲线,可以看出所得高度明显存在螺旋变化,这将严重影响管道重要参数曲率半径的计算,导致测量结果与实际情况相差较大。利用上面的标定方法,在B位置对测绘系统的旋转因子进行标定试验,可以获得Y和Z向旋转因子的数值为Ky=-0.0424,Kz=-0.0023,因此可以对螺旋误差进行补偿,图6给出了经过补偿之后的高度曲线,可以看出已经消除了由于旋转引起的高度误差。
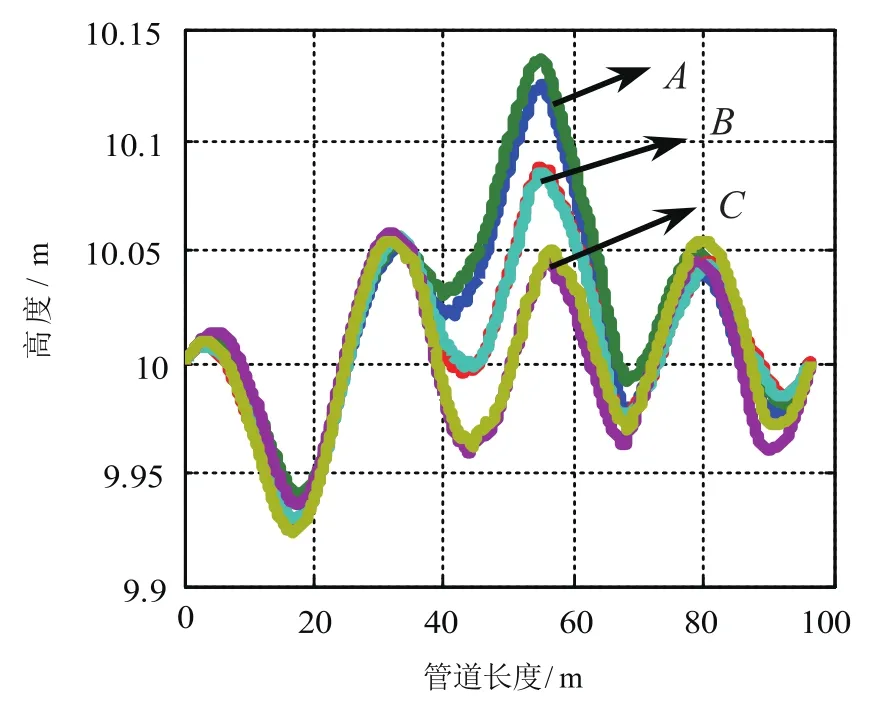
图5 不补偿螺旋误差时管道轨迹曲线Fig.5 Track of pipeline without compensating rotatory error

图6 补偿螺旋误差后管道轨迹曲线Fig.6 Track of pipeline after compensating rotatory error
对测量获得的轨迹数据按照每16m的长度计算曲率半径,可得表1的曲率半径对比数据,其中A1表示位置A第一次测量结果,A2表示位置A第二次测量结果,其他位置含义于此类似。曲率半径的大小反映了管道的弯曲程度,存在螺旋误差时,曲率半径的计算结果虽明显存在误差,且数值明显偏小。
由补偿螺旋误差前后的曲率半径数据可以看出,补偿前,由于轨迹存在旋转,曲率的数值明显小于补偿后的数值,以位置A1的第一段计算结果为例,补偿前曲率半径的计算结果为660m,而经过补偿后曲率半径为730m,补偿后数值明显大于补偿前,可以看出如果不对螺旋误差进行补偿,则将严重影响曲率半径的计算。另外,经过补偿后的轨迹,其两次测量的重复性优于1cm,各次形变测量精度优于1cm。可见,通过精密补偿螺旋误差,将大大提高管道参数的测量精度。

表1 曲率半径对比Tab.1 Compare of curvature radius
5 结论
针对管道测绘数据中的螺旋误差,本文进行了如下研究:
1)分析了螺旋误差的产生机理,给出了误差模型,并进一步通过分析给出了工程应用的简化模型;
2)给出了螺旋误差的标定方案,通过预先的误差标定来补偿大部分的螺旋误差,通过误差模型扩充在后处理中自动补偿剩余误差,从而提高系统对不同管道的适用性。
3)通过实际试验验证,表明该方法可对螺旋误差进行精密补偿,补偿后测量误差达到1cm左右,有效地提高了曲率半径、相对变形等管道参数的测量精度。
[1]岳步江,唐雅琴,张永江,等.组合导航技术在油气管线测绘系统中的应用[J].惯性技术学报,2008,16(6):551-555.
[2]刘绍亮.油气管道缺陷无损检测与在线检测诊断技术[J].天然气与石油,2007,25(2):10-14.
[3]Grid.New Technologies for Natural Gas Operations[J].Pipeline&Gas Journal,2000,226(10):40-45.
[4]朱庄生,万德钧,王庆.航位推算累积误差实时修正算法研究[J].中国惯性技术学报,2003,11(3):7-11.
[5]K R Britting.Inertial Navigation Systems Analysis[M].New York:Wieley-Interscience,1971.
[6]R M Rogers,Applied Mathematics in Integrated Navi gation System(2nd Edition)[C]//.AIAA,2003.
[7]Litmanovieh Y A,Lesyuchevsky V M,Gusinsky V Z.Two new classes of strapdown navigation algorithms[J].Journal of Guidance,Control,and Dynamics,2000,23(1):34-44.