纬度未知条件下罗经系统行进中启动方法研究
2015-07-09李新纯徐海刚李海军裴玉锋
原 润,李新纯,徐海刚,李海军,裴玉锋
(北京自动化控制设备研究所,北京 100074)
0 引言
罗经系统在初始对准时,需要纬度信息。然而在某些情况下,纬度信息无法获得,例如GPS受到干扰无法定位;舰船遭到攻击,定位设备损坏等,这时可以采用纬度未知条件下的启动方法。文献[1]研究了静基座条件下地理纬度未知时捷联惯导系统的初始对准问题,它直接利用陀螺和加速度计的输出来估计地球自转角速度和重力加速度之间的夹角,该方法只适用于静基座条件下。文献[2]研究了晃动基座条件下地理纬度未知时的捷联惯导系统的初始对准问题,它基于惯性系中的重力加速度来估计纬度和进行初始对准,但其受晃动干扰的影响依然很大,且无法适用于动基座条件。
本文介绍了一种纬度未知条件下的罗经系统航行中启动方法。一方面通过引入辅助速度信息,补偿掉由于载体机动所产生的误差,从而实现航行中启动;另一方面对测量重力加速度进行积分,以进一步降低测量噪声的影响。启动后采用组合导航或纯惯性导航的方式,实现方位的保持。
1 坐标系定义
1)导航坐标系(n系):原点位于载体重心,xn轴指向北,yn轴指向天,zn轴指向东。
2)载体坐标系(b系):原点位于载体重心,xb轴指载体前方,yb轴指载体上方,zb轴指向载体右方。
3)凝固惯性坐标系(ib0系):对准开始时刻的b系凝固后形成的惯性坐标系。
4)地心惯性坐标系(i系):原点位于地球中心,xi轴、yi轴在地球赤道平面内,xi轴指向春分点,zi轴沿地球自转轴,且xi轴、yi轴与zi轴构成右手坐标系。
5)初始时刻导航坐标系(n0系):把初始时刻的导航坐标系定义为n0系,它相对地球表面固定不动,即不随捷联惯导在地球表面运动而运动。
2 启动方法
本方法的启动过程为:纬度估计与初始对准同步进行,待纬度估计结束后,将估计纬度值代入初始对准计算量中,完成初始对准。
2.1 纬度估计方法
凝固惯性坐标系与任意起始时刻t0的载体坐标系重合,载体坐标系随地球一起转动而凝固惯性坐标系保持不变。随着地球的转动,重力加速度在惯性空间内的方向会发生改变。两个不同时刻t1与t2的g1ib0与g2
ib0之间的夹角θ与纬度L之间存在几何关系(如图1),可以通过求出θ角来间接地求取纬度L。

图1 纬度估计原理图Fig.1 The schematic diagram of latude estimation

结合式(1)~式(3),可得

根据时间t1与t2计算角度α。

2.2 初始对准方法

在初始对准起始时刻t0,惯性坐标系与地球坐标系重合,经过时间tk后,地球坐标系绕地轴ze以地球自转角速率ωie顺时针转动一个角度ωie(tk-t0)。由导航坐标系与地心惯性系之间的几何关系可知

(2)矩阵Cib0b的解算

(3)矩阵Ci ib0的解算
将重力加速度在ib0系和i系上投影,得:

式中⊗表示矢量叉乘。
2.3 实现方案
当舰船处于航行状态时,由于载体的机动,重力加速度的测量值会引入误差,从而使纬度估计和初始对准产生误差。可以通过舰船上的测速装置,如电磁计程仪,来补偿掉这一部分误差。具体方法如下:
当载体存在机动时,由捷联惯导比例方程式可以得出:


罗经系统启动后,需要保持方位角不发散。可以根据纬度估计值和初始对准结果,采用组合导航或者纯惯性导航的方法,实现方位保持。
2.4 误差分析
罗经系统对准原理与惯导系统对准原理相同,其方位角误差主要由等效东向陀螺漂移引起。其对应关系为:

而纬度估计误差主要由等效北向陀螺漂移引起。其对应关系为:

式中εn为北向陀螺漂移,εe为东向陀螺漂移,R为地球半径。
由于电磁计程仪测量的速度存在一定的误差,当采用电磁计程仪速度进行机动补偿时,其北向测速误差会等效为东向陀螺漂移,引起方位角误差;东向测速误差会等效为北向陀螺漂移,引起纬度估计误差。
3 仿真及试验
3.1 理论仿真
3.1.1仿真条件
设陀螺常值漂移ε=0.02(°)/h;陀螺随机游走系数εR=0.0005(°)/;加速度计零偏 ∇=100μg。
假设典型海况下的摇摆模型为:

式中γ、φ和θ分别为载体滚动角、方位角和俯仰角;t为时间。
载体北向速度Vn=10m/s,东向速度Ve=10m/s。
3.1.2仿真结果
为了检验该方法在不同纬度下的适应性,分别在纬度20°、40°、60°、80°进行仿真。启动时间300s。表1为纬度估计与对准结果。
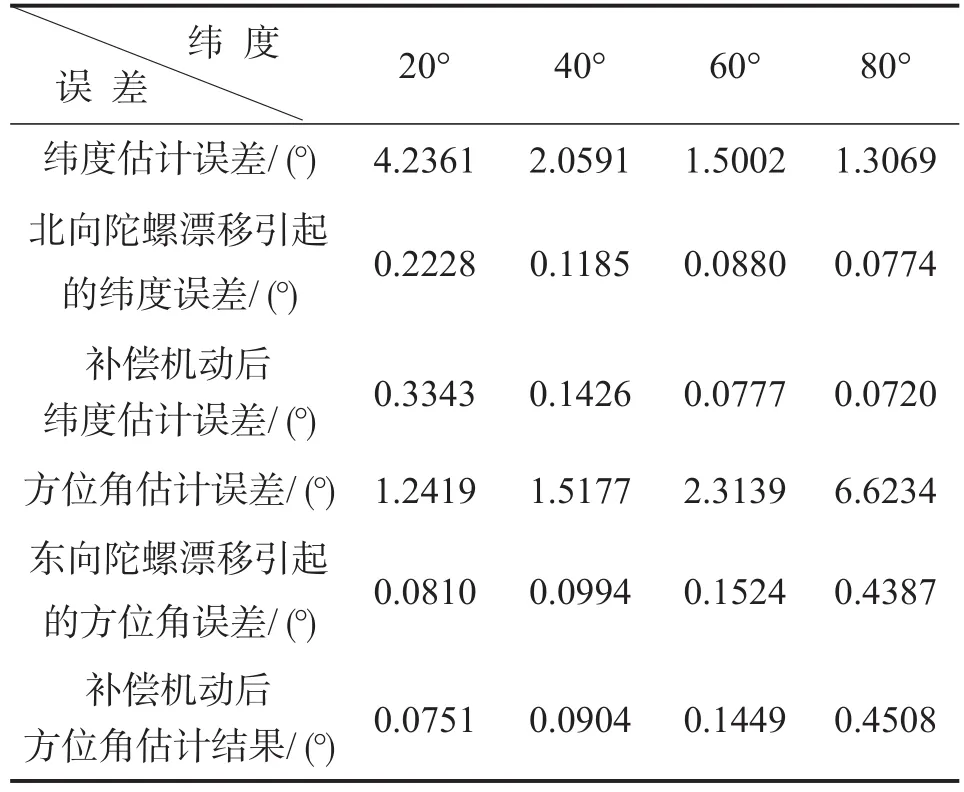
表1 动基座下纬度估计和对准结果Tab.1 The results of latude estimation and alignment on moving base
在动基座条件下,可以通过电磁计程仪获取载体速度信息,从而补偿掉由载体机动引起的纬度估计误差和方位角估计误差。剩余误差主要由陀螺漂移引起,验证了纬度估计误差和方位角估计误差与陀螺漂移关系的正确性。
在纬度40°的条件下,启动结束后,纯惯性导航40小时,图2为方位角误差。

图2 方位角误差Fig.2 The error of yaw
结果表明,启动结束后,采用纯惯性导航的方式可以实现方位保持。
3.2 试验验证
为了验证本方法的正确性,利用某型激光捷联惯导系统舰载试验数据进行仿真,以启动时间为300s,截取100条次数据进行验证。对启动结果进行了统计,图3和图4为纬度估计误差和方位角误差。

图3 纬度估计误差Fig.3 The error of latude estimation

图4 方位角误差Fig.4 The error of yaw
可以看出,300s的启动时间,纬度估计精度达到0.09°(RMS),方位角估计精度达到 0.07°(RMS)。
启动结束后,采用纯惯性导航方式工作,图5为方位角误差。
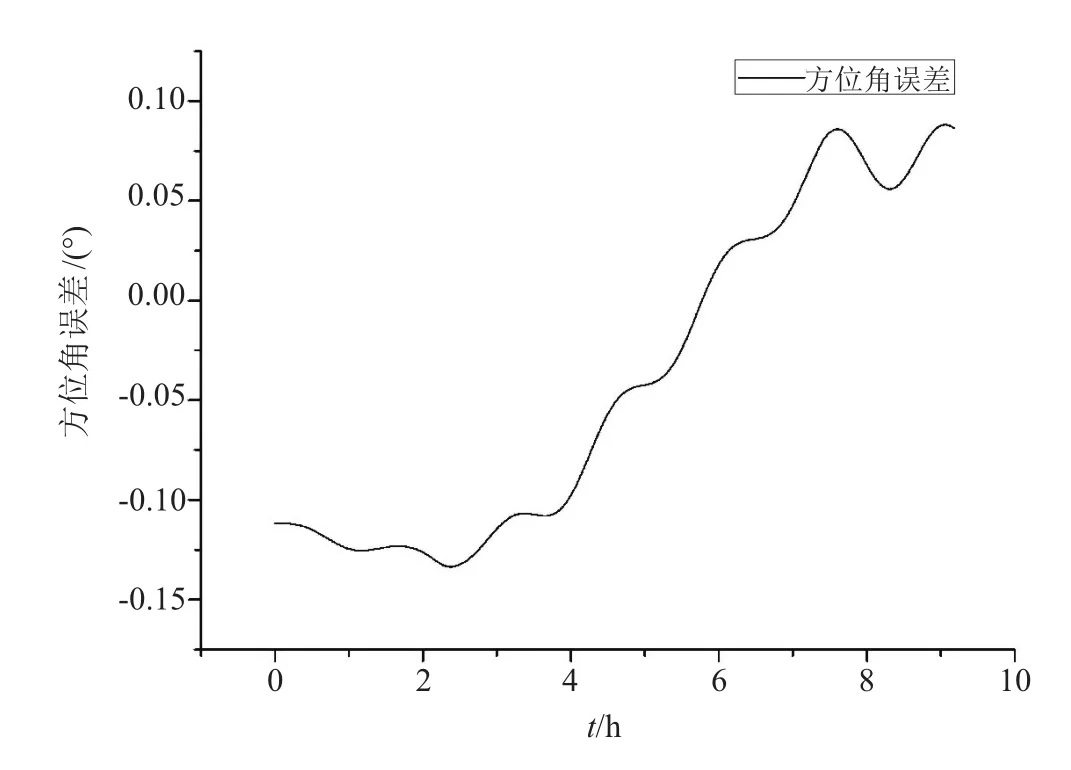
图5 方位角误差Fig.5 The error of yaw
结果表明,启动结束后,采用纯惯性导航的方式可以实现方位保持。
4 结论
本文针对纬度未知条件下罗经系统行进中的启动问题,介绍了一种纬度估计与初始对准方法。罗经系统启动后,采用组合导航或纯惯性导航的方式实现方位的保持。理论仿真及舰载试验数据仿真验证了该方法的正确性。纬度未知条件下的动基座启动方法是罗经系统的一项关键技术,可以极大地提高罗经系统的应急启动能力和生存能力。
[1]严恭敏,严卫生,徐德民,等.纬度未知条件下捷联惯导系统初始对准分析.航天控制,2008,26(2):31-37.
[2]王跃钢,杨家胜,杨波.纬度未知条件下捷联惯导系统晃动基座的初始对准.航空学报,2012,33(12):2322-2329.
[3]Acharya A,Sadhu S,Ghoshal T K.Improved self-alignment scheme for SINS using augmented measurement.Aerospace Science and Technology 2011,15(2):125-128.
[4]Wei C L,Zhang H Y.SINS in-flight alignment using quaternion error models.Chinese Journal of Aeronautics,2000,14(3):166-171.
[5]Fang J C,Wan D J.A fast initial alignment method for strapdown inertial navigationsystem on stationary base.IEEE Transactions on Aerospace And Electronic Systems,1996,32(4):1501-1504.
[6]赵长山,秦永元,白亮.基于双矢量定资的摇摆基座粗对准算法分析与试验[J].中国惯性技术学报,2009,17(4):436-440.
[7]Gu Dong-qing,EI-Sbeimy N,Hassan T,et al.Coarse alignment for marine SINS using gravity in the inertial frame as a reference[C]//.IEEE/ION Position,Location and Navigation Symposium.Monterey,USA,2008.
[8]Jiang Y F.Error analysis of analytic coarse alignment[J],IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):334-337.
[9]严恭敏,秦永元,卫育新,等.一种适用于SINS动基座初始对准的新算法[J].系统工程与电子技术,2009,31(3):634-637.