无人机空中加油自主会合制导律研究
2015-07-09袁博,杨军
袁 博,杨 军
(西北工业大学航天学院,西安 710072)
0 引言
目前加油会合存在定点会合、中途会合、受油机主动会合(FTO)3种方式[1]。FTO方式下没有加油机主动配合,需要受油机自主接近加油机并满足空中加油条件,对自主FTO制导律设计提出了挑战。
关于自主FTO制导律设计的文献很少,在作者查到的文献中,大致可以分为两类方法:一类是基于最优航迹规划的制导律设计方法,如Burns[2]以Dubin曲线为基础规划出最优航迹,并利用动态逆设计了航向制导律,这类方法需要不断进行航迹规划,计算量较大;第二类是基于各种自寻的制导律及其改进型的设计方法,这类方法的特点是无需航迹规划,因此计算量相对较小,但制导律设计有一定难度,如郭军[3]提出的制导方案,航向采用带终端碰撞角约束的比例导引律和纯追踪法,纵向采用爬升角高度控制,并给出了一种速度控制方法。
文献[3]的制导律相对基于最优航迹规划的制导律来说,具有计算量小,实现简单的优点,但作者认为也有可以改进的地方。
1)带碰撞角约束的比例导引律需要在期望视线角的基础上计算期望视线角速率,稍显复杂,本文准备引用一种常见的带落角约束的比例导引律形式,以简化制导律计算;
2)文献中纵向采用了高度控制,使得航向和纵向制导律形式不统一,增加了制导律设计难度,本文依然准备采用带落角约束的比例导引律,使得制导律形式上与航向统一,简化了制导律设计;
3)文献中速度指令设计与相对控制策略引入了较强的假设,并且设计的速度指令过于复杂,本文准备引入相对距离反馈与速度反馈进行相对距离控制,形式上相对简单,也不用引入文献中的假定条件。
1 制导律设计
FTO自主会合要求无人机在保证加油机安全前提下能够自主飞行到期望的会合位置,即与加油机保持相对位置稳定;因此,从制导层面来说,需要对无人机与加油机的相对位置进行控制。本文假定无人机采用过载反馈驾驶仪结构,开展过载形式的制导律设计。
1.1 设计思路
假定无人机期望会合点与加油机相对距离为(ΔRx,ΔRy,ΔRz),那么无人机会合问题就是如何使无人机与加油机的相对距离稳定在(ΔRx,ΔRy,ΔRz)上。
以硬管加油为例,假定硬式加油管管长lm,加油时管口处于无人机纵向平面,在加油机后方,与纵轴夹角η∘,则机体系下的相对距离关系见图1。

图1 加油管锥套与加油机相对距离Fig.1 Relative distance between drogue and tanker
图1中,o为加油机质心位置,ox1为加油机纵轴,指向头部为正,oy1在加油机纵向对称平面内,垂直ox1,向上为正,oA为加油机硬管,A为管口。
根据图1可得到机体系[4]下的相对距离期望值分量,公式如下所示:

再根据机体系与地面坐标系[4]间的转换矩阵,可得到地面坐标系下相对距离期望值分量,公式如下:

式中:T11=cosψcosϑ,

本文首先引入虚拟瞄准点,即将期望会合点作为虚拟瞄准点,如每一时刻的加油机位置记为(xm,ym,zm),则虚拟瞄准点位置为(xm-ΔRx,ym-ΔRy,zm-ΔRz),且虚拟瞄准点的速度大小及方向与加油机相同,记为vm。这样无人机会合问题就转化为如何使无人机与虚拟瞄准点相对距离稳定在(0,0,0)上。
将无人机与虚拟瞄准点间的相对距离ΔRy和ΔRz稳定在0上等价于视线高低角和视线方位角稳定在0,而带角度约束的比例制导律就可以使视线角稳定在期望的角度上,因此本文的俯仰通道和航向通道制导律采用这种形式。
对于将无人机与虚拟瞄准点间的相对距离ΔRx稳定在0上的问题,本文采用直接对ΔRx进行反馈控制,即根据ΔRx的大小改变推力大小,从而改变速度,进而影响ΔRx,以通过反馈保证ΔRx稳定在0上。
1.2 纵/航向制导律设计
纵向和航向制导律采用带角度约束的比例制导律,形式如下:

式中:qεDF为视线高低角期望值,取0;
qβDF为视线方位角期望值,取-ψvm。
1.3 轴向制导律设计
轴向制导律的目的是将ΔRx稳定在0上,本文采用基于ΔRx和无人机速度的制导律,形式如下:

式中:nxc为无人机轴向过载指令;
kv为速度反馈回路比例项系数;
kR为位置反馈回路比例项系数;
vm为加油机速度。
2 仿真分析
本文基于无人机与加油机的空间质点模型来对设计的无人机空中加油制导律进行验证。
2.1 仿真模型
本文采用空间质点运动学模型来进行仿真验证,忽略了传感器特性,并且无人机飞行控制系统采用一阶等效环节来刻画,时间常数取为0.8s,仿真模型原理框图如图2所示。
图中,nx/ny/nz分别为无人机轴向过载、法向过载和侧向过载。

图2 仿真模型结构图Fig.2 Simulation model structure
2.2 仿真条件
假定加油机初始位置(2000m,6000m,500m),初始速度300m/s,水平飞行,弹道偏角10∘。
假定加油管管长l=15m,与加油机纵轴夹角η=30∘,则根据虚拟瞄准点定义,虚拟瞄准点坐标初始位置为(1987m,5992.5m,500m),基于虚拟瞄准点的期望距离值为(0,0,0)。
假定无人机初始位置为(0,5000m,0),初始速度250m/s,速度允许变化范围150~350m/s,水平飞行,弹道偏角为0°,最大允许轴向加速度200m/s2。
2.3 仿真结果及分析
无人机与虚拟目标相对位置应稳定在(0,0,0)上。相关仿真曲线如图3~图9所示。

图3 速度曲线Fig.3 Speed curve

图4 弹道倾角曲线Fig.4 Trajectory angle curve ofθ

图6 相对距离ΔRx曲线Fig.6 Relative distance curve ofΔRx

图8 相对距离ΔRz曲线Fig.8 Relative distance curve ofΔRz

图5 弹道偏角曲线Fig.5 Trajectory angle curve ofψv
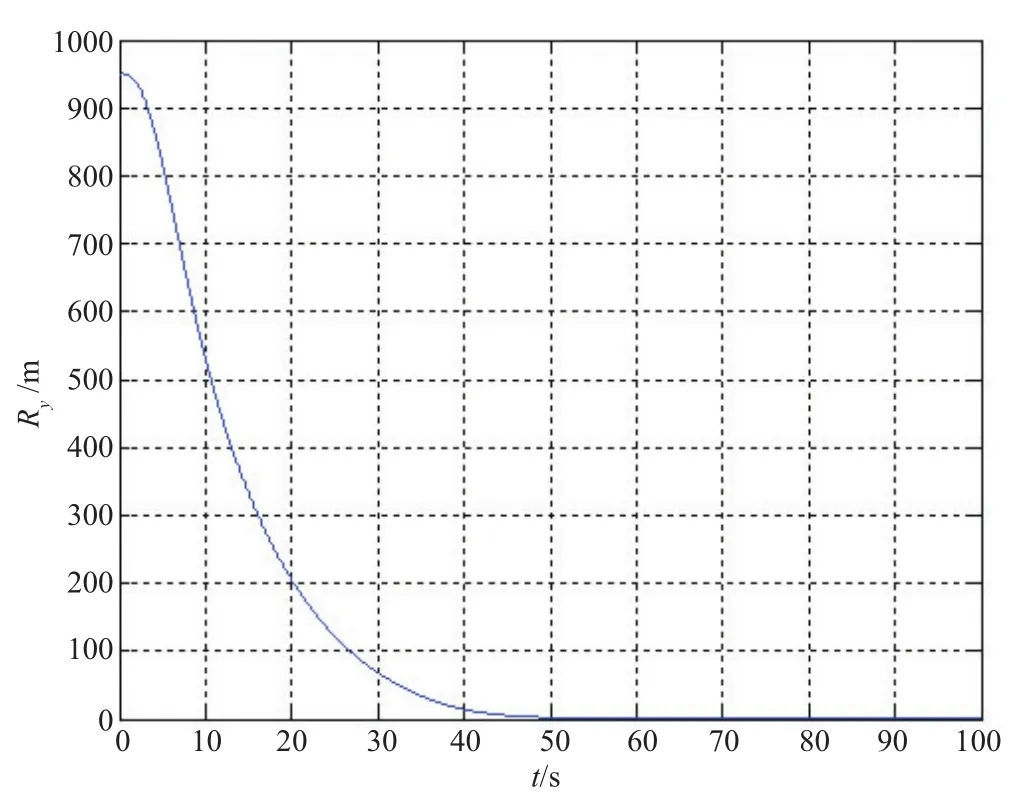
图7 相对距离ΔRy曲线Fig.7 Relative distance curve ofΔRy

图9 无人机-加油机空间会合飞行曲线Fig.9 Rendezvous trajectory between UAV and tanker
由图3~图9可知,本文设计的对接制导律能够满足空中加油的对接要求,即保证相对距离稳定在期望值 (ΔRx,ΔRy,ΔRz)上。
本文的仿真是基于空间质点模型得出的,一般导引律研究都是从质点模型入手进行研究的,因此研究结果具有一定的可信性。
4 结论
通过本文研究,得到以下主要结论:
1)基于空间质点模型的仿真证明了设计的制导律方案能够实现无人机空中加油对接;
2)基于空间质点模型的仿真证明了纵向采用带落角约束的比例导引律同样可以实现空中加油对接的目的,高度控制并不是唯一选择;
3)文中的轴向制导律设计及相应仿真结果证明,引入相对距离反馈和速度反馈的相对距离控制策略是有效的,并且避免了复杂的速度指令设计。
当然,以上结论是在简化模型基础上得到的,要进一步应用到工程上,需要在更详细的模型上进行更深入的研究。
[1]Joseph P N,Jacob L H.Automated aerial refueling:Ex tending the effectiveness of unmanned air vehicles[C]//.AIAA Modeling and Simulation Technologies Conference and Exhibit.San Francisco:AIAA,2005-6005.
[2]Brain S Burns.Autonomous unmanned aerial vehicle rendezvous for automated aerial refueling[D].Ohio:Air Force Institute of Technology,2007.
[3]郭军,董新民,徐跃鉴,等.无人机空中加油自主会合控制器设计[J].控制与决策,2010,25(4):567-571.
[4]Yoshimasa Ochi and Takeshi Kominami.Flight Control for Automatic Aerial Refueling via PNG and LOS Angle Control[C]//.AIAA Guidance,Navigation,and Control Conference and Exhibit.15-18 August 2005,San Francisco,California.
[5]Atilla Dogan,Shinya Sato.Flight Control and Simulation for Aerial Refueling[C]//.AIAA Guidance,Navigation and Control Conference and Exhibit.San Francisco:AIAA,2005-6264.