惯性卫星紧组合导航系统仿真分析
2015-07-09王振凯黄显林
王振凯,黄显林
(哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨 150080)
0 引言
近年来,SINS/GPS松组合导航系统已经日趋成熟,在军民领域发挥了重要作用。松组合方案主要以GPS辅助SINS,它又可分为GPS重调SINS以及位置、速度组合[1]。其中后者相对于前者具有精度高、性能及可靠性好的特点,目前研究和应用较多[2-6]。它采用GPS和SINS输出的位置和速度信息的差值作为量测值,经由Kalman滤波器估计出SINS的误差,对SINS进行校正,结构简单,便于工程实现[1,7]。但由于其固有缺陷,也暴露出一些不容忽视的问题。例如:当可见卫星数目低于4颗时,由于信号机无法提供载体的位置和速度而无法与INS进行组合[8];信号接收机提供的位置和速度并非原始测量数据,而是经过最优滤波估计得到的,这会给组合导航系统带来量测相关问题[9]。基于以上不足,为了从根本上克服松组合系统的缺点,各主要发达国家相继进行到紧组合即伪距、伪距率组合的研究中。基于伪距、伪距率的SINS/Satellites组合导航。
紧组合导航系统是一种高水平的组合方式,其主要特点是GPS接收机和INS相互辅助,它利用导航卫星提供的星历数据与INS给出的位置和速度信息,计算出相应的伪距和伪距率,与接收机接收的伪距和伪距率相比较得出的误差作为量测值,通过Kalman滤波估计GPS和INS的误差量,从而实现系统的校正。文献[7]采用UKF方法避免了非线性模型线性化引入的误差,具有较高的精度和鲁棒性。文献[8]提出了一种惯性/卫星伪距/伪距率组合导航算法的实现方法,并进行了离线仿真。文献[9]搭建了硬件系统,通过实验表明,松散组合时误差为紧耦合导航系统的3倍。文献[10]根据GPS误差模型及惯性导航系统在地固坐标系中的误差方程,以伪距差作为测量量,设计了组合导航系统的Kalman滤波器,仿真表明可以充分利用GPS信息修正INS导航误差,并且INS可以辅助GPS重新捕获卫星信号。
本文首先推导了惯性系统、伪距、伪距率组合导航系统的数学模型,对紧组合系统量测方程进行了分析,由于量测方程的推导是对每颗可见星分别进行泰勒展开得到的,这就消除了星与星之间的噪声相关性问题。然后分别对可见星为4颗和3颗时进行仿真研究,通过PWCS方法分析了各个阶段可观测矩阵的秩,随着机动方式的增加,系统的可观测性增强。仿真结果表明,对于可见星为3颗的情形,虽然相比于可见星多于4颗的情形,紧耦合组合导航系统精度会降低,但是也能保证一定的导航精度,提高了组合导航系统的容错率。
1 SINS/Satellites紧组合导航系统的数学模型
1.1 紧组合误差状态方程
SINS以东北天地理坐标系作为导航坐标系,SINS的主要误差有位置误差、速度误差、姿态角误差、加速度计误差、陀螺漂移。Satellites接收机中主要有钟偏误差和钟漂误差。
建立SINS/Satellites组合系统的线性状态方程


式中βtru=1/τf为反相关时间,τf为相关时间。
根据文献[5]可得FI(t)、FG(t)、GI(t)和GG(t)的具体表达式,其中WI(t)和WG(t)均为零均值高斯白噪声。
1.2 紧组合量测方程
在紧组合系统中,载体的真实位置可用维度、精度、高度(L,λ,h)表示,与此对应的载体在地心地固坐标系中的真实位置(x,y,z)可以通过式(3)~式(5)求出:
设SINS解算出的载体位置为[xIyIzI]T,卫星星历解算出的卫星位置为[xsyszs]T,载体的真值[xyz]T;根据载体位置和卫星位置计算的距离称为INS伪距ρI,Satellites接收机输出的伪距为ρG。将INS和Satellites伪距之差作为组合导航系统的观测量。
Satellites接收机测量得到的与第j颗卫星之间的伪距可以表示为:

式中δtr为时钟误差等效的距离;vρ为伪距测量噪声,由多路径效应、对流层延迟误差、电流层误差等引起。


取几何位置最佳的4颗可见星时,伪距率差的测量方程为:


联立上述推导的伪距、伪距率量测方程,可得伪距、伪距率组合量测方程为:

式中Vρ(t)、Vρ˙(t)为伪距、伪距率测量噪声,假定为零均值高斯白噪声。
由观测方程的推导过程可以看出,各个卫星信号之间是独立提供信息的,当卫星信号少于4颗时,观测方程相应行去掉,还具备一定的观测能力。
2 紧组合导航系统的可观测性分析
文献[11]证明紧组合导航系统的可观测性分析可以通过PWCS提取的可观测矩阵SOM来进行分析,由1.2节量测方程的推导过程可知,当可见星的个数减少时,对应的独立观测方程数目将减少,这势必会影响组合导航系统的可观测性。采用表1飞行方案,当可见星数目由4个逐渐减少时,SOM的秩的变化情况如表2所示。
当可见星的数目逐步减少时,可以通过增加载体机动方式来提高导航系统的可观测性,这也充分体现了可观测性与载体路径有关。并且也可以看出当可见星为1颗时,可以通过机动的方式提高系统的可观测性,保持一定的导航精度。而当可见星数目小于4颗时,松组合系统由于没有Satellites提供可靠信息,不能进行有效导航。
3 仿真分析
由第2节可知,本文仅对可见星为4、3颗的情况进行分析。仿真条件设为:初始位置误差分别为0.3″,0.3″,12m;初始速度误差为0.1m/s,初始姿态误差分别为2500″,2500″,1°。陀螺常值偏差为0.1(°)/h,随机漂移为0.01(°)/h,加速度计常值偏差为1mg,随机误差为500mg。Satellites更新速度为0.1s,伪距观测误差分别为:偏置误差10m,随机误差32m,随机伪距率误差0.05m/s,相关时间为1000s。

表1 仿真飞行方案Tab.1 Scheme of the flight
图1~图3为可见星为4颗时紧耦合系统的位置、速度、和姿态误差曲线。从图中可以看出,位置的误差变化曲线比较理想,误差最后稳定在3.317×10-7rad,3.082×10-7rad,1.008m。而速度误差会在转弯加速时出现较为剧烈的变化,随后误差也会减小,且这些变化是在误差允许的范围内的。虽然仿真中初始姿态误差设置值比较大,但是各个方向的姿态误差最后分别稳定在0.1084″,1.27″,4.033″。仿真结果表明,基于伪距、伪距率的紧耦合导航系统能够取得较高的导航精度。
从图3~图6可以看出可见星为3颗时紧耦合系统的位置、速度、和姿态误差曲线。由于轨迹设定转弯时过载过大,导致位置、速度在第一次转弯加速时产生过多漂移,与3颗Satellites不能进行定位解算一样,位置和速度都会在一定范围内出现较大误差,较4颗可见星时精度要低一个数量级。这是由于在可见星减少为3颗后,通过增加机动方式,达到了提高系统可观测性的目的,保证了一定的导航精度。

图1 4颗可见星位置误差Fig.1 Position error with 4 seen satellites
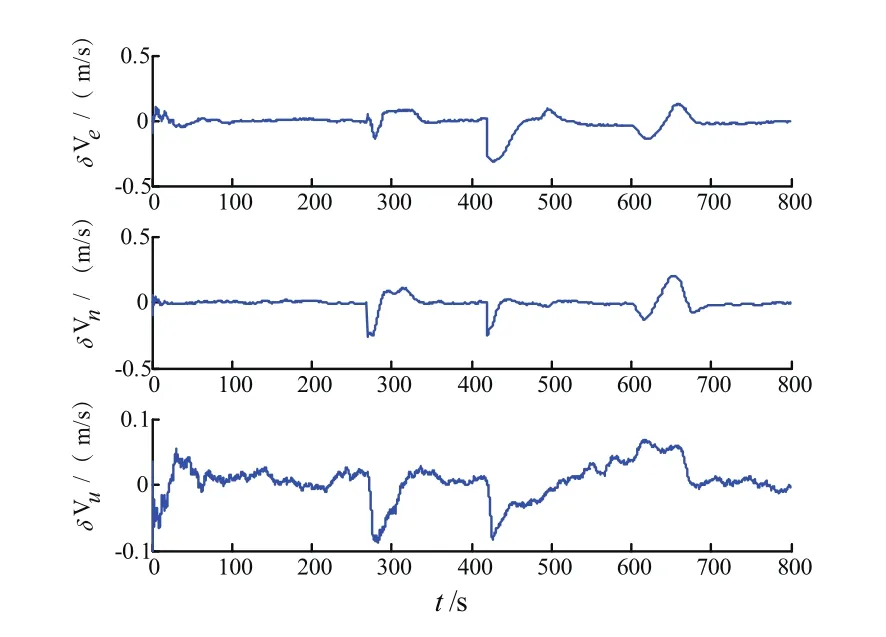
图2 4颗可见星速度误差Fig.2 Velocity error with 4 seen satellites

图3 4颗可见星姿态误差Fig.3 Attitude error with 4 seen satellites

图4 位置误差Fig.4 Position error

图5 速度误差Fig.5 Velocity error

图6 姿态误差Fig.6 Attitude error
4 结论
从以上推导过程和仿真分析可以得出以下结论:
1)由于测量方程推导过程,是对每颗星分别进行处理的,因而各星所提供的观测量之间是相互独立的,因此紧组合SINS/Satellites导航系统,直接利用伪距、伪距率信息作为观测量,消除了松组合导航系统定位解算式最优滤波所导致的噪声相关性问题。
2)由于已经把时钟偏差和时钟漂移纳入状态方程,基于观测量之间的独立性,当可见星数目减少时,松组合系统Satellites接收机没有输出,将没有办法对SINS系统进行校正,而基于伪距、伪距率的紧组合导航系统,仍可以通过观测量进行反馈,甚至当可见星数目较少时,通过增加载体的机动方式,提高可观测性,达到一定的导航精度。
[1]Schimdt G,Phillips R.“INS/GPS Integration Architectures”and“INS/GPS Integration Architecture Performance Comparisons”[R].NATO RTO Lecture Series,RTO-EN-SET-116,Low-Cost Navigation Sensors and Integration Technology,2008.
[2]Itzik Klein,Sagi Filin,Tomer Toledo etal..Assessment of Aided-INS Performance[J].The Journal of Navigation,2012,1(65):169-185.
[3]Mohammed,EI-Diasty,Spiros Pagiatakis.A Frequency-Domain INS/GPS Dynamic Response Method for Bridging GPS Outages[J].The Journal of Navigation,2010,04(63):627-643.
[4]Christopher Hide,Terry Moore and Martin Smith.Adaptive Kalman Filter for low-cost INS/GPS[J].The Journal of Navigation,2010,01(56):143-152.
[5]王惠南.GPS导航原理与应用[M].科学出版社.206-267.
[6]张国良,曾静.组合导航原理与技术[M].西安交通大学出版社.2008.
[7]鲍其莲,周媛媛.基于UKF的GPS/SINS伪距(伪距率)组合导航系统设计[J].中国惯性技术学报,2008,16(1):78-81.
[8]王黎斌,尚克军,王孝利,等.一种惯性/GPS伪距/伪距率组合导航算法[J].战术导弹控制技术,2011,28(1):16-18,43.
[9]郑辛,付梦印.SINS/GPS紧耦合组合导航[J].中国惯性技术学报,2011,19(1):33-37.
[10]袁俊刚,范胜林,刘建业,等.GPS/SINS紧组合系统导航性能研究[J].航天电子对抗,2011,27(2):17-20.
[11]刘飞,胡小毛,翁海娜,等.SINS/GPS紧耦合系统可观测性分析[J].天津大学学报,2011,44(5):391-395.