相控阵跟踪系统测角与角度跟踪算法∗
2015-01-23
(电子科技大学电子工程学院,四川成都611731)
0 引言
在各类卫星通信系统中,由于载体在运动过程中,姿态和地理位置发生变化,会使天线的指向偏离卫星,造成通信中断。为了能达到最佳通信效果,需要天线在通信过程中始终对准卫星,必须对载体的这些变化进行隔离,使天线始终对准卫星[1],自跟踪系统的作用就在于此。
自跟踪接收系统将天线馈源处接收到的射频微弱信号放大、变频、滤波及角误差(包括方位误差和俯仰误差)检测,并把角误差信号传入跟踪滤波器,通过稳健的跟踪滤波算法实现对卫星目标位置的准确预测,控制天线波束对准目标信号[2],实现对目标信号的自动跟踪,最终使双向微波综合信道达到最佳的通信效果。
本文所研究的课题正是在上述背景下产生,设计并实现对相控阵天线接收到的卫星信号的预处理和角度测量,为后续自跟踪系统提供信息,并对跟踪算法进行分析。
1 系统方案设计
天线波束自跟踪系统架构设计如图1所示,采用单脉冲跟踪方式[3],利用接收阵列接收到的信号完成对通信卫星的连续跟踪,并控制发射波束自动指向卫星方向。
图1 天线波束自跟踪系统架构图
实现相控阵天线角度测量的方法主要有比相和差波束法、比幅和差波束法、顺序波瓣法、基于空间谱估计的测角法。根据项目的具体特点,本系统采用子阵相关测角方法。
为实现基于相位比较的单脉冲跟踪,需将接收阵列划分成若干个子阵,这里按最小子阵数设计,划分成4个2×4的子阵。各天线单元的信号合成4个子阵,进行4路A/D变换,得到的基带数字信号在接收信号处理部分形成和波束,得到的和波束接收信号通过信号输出端,送给解调、解码分系统。同时在图1中的接收信号处理部分采用比相法提取出角度误差信息,送入数字波束定向系统进行跟踪滤波运算,得到波束指向控制的跟踪滤波结果,处理过程中将利用运动平台主机送达的平台姿态角信息,完成单脉冲闭环跟踪处理,实时调整收发阵列波束指向,确保收发天线波束[4]一直对准卫星方向。
本文所要完成的任务为框图中深色部分,即接收信号处理,包括下变频、滤波、抽取、角误差参数测量等。利用Matlab完成对角度误差测量的仿真及角度跟踪仿真。
DAPS(数字天线波束自定位)系统是根据卫星在惯性空间的初始位置信息,给出波束在惯性空间的搜索方向指向(实际中为惯性空间方向余弦参数),利用平台姿态数据将波束指向信息转换为平台和天线坐标系下的波束指向,实现对搜索波束的指向控制。搜索/捕获的方案设计如图2所示,对每一个驻留波位,DAPS系统首先进行4通道接收,利用子阵间的信号互相关进行信号检测,若超过检测门限,则利用下面介绍的顺序多波束方法实现方向捕获,来波方向经捕获过程确定后,在来波方向形成接收和波束,对信号进行解扩、解调等,以确认接收的信号是期望的协作通信信号,然后转入跟踪模式;否则进入下一个波位重新搜索。
图2 搜索/捕获模式实现原理
在跟踪状态下,各模块之间控制与连接的逻辑关系如图3所示。接收阵列接收得到的信号经过A/D采样变成数字信号[5],经数字下变频、滤波、抽取过程,变成适宜于实时处理的数字信号,再经相关处理剔除噪声的影响,保留子阵之间的相位差信息;这些相位信息包含了入射信源相对于接收阵列的角度偏差εα,εβ。利用运动平台惯性设备传递过来的平台姿态数据,可以将阵面坐标系下的角度信息转化成惯性坐标下的角度信息;跟踪滤波器完成惯性坐标系下的角度跟踪,再将预测角信息转换到阵面坐标系下,用于控制接收阵列的波束指向,最终完成对入射信源的角度跟踪。此时,角度预测信息还送至发射阵列,用于控制其波束对准卫星方向。

图3 波束跟踪状态软硬件实现逻辑关系
2 测角算法与角度跟踪算法
2.1 天线位置与角度定义
如图4所示,在相控阵雷达目标探测等应用场合,阵列通常垂直放置(如图中的4子阵),阵面的法线方向指向水平方向,仍以X轴为参考,角度的定义有:方位角φ,-90°~90°,射线在XOZ面投影与Z轴(法线)的夹角;俯仰角θ,-90°~90°,射线与XOZ面投影的夹角。
图4 阵列垂直放置-雷达应用场景
射线在3个坐标轴的方向余弦为

信号方向向量为

以第1子阵为参考,子阵2,3,4的坐标为

其相移分别为(信号先到这些子阵,移相是负的)
设相控阵波束指向角为φ0,θ0,则各子阵的波束指向相位为

经过子阵移相器后,各子阵接收信号的相位差为
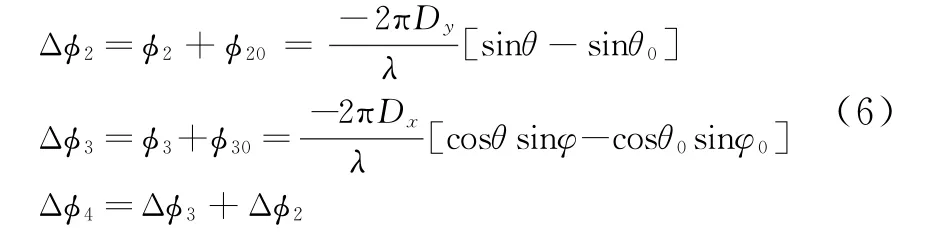
俯仰角误差近似为

方位角的近似解为

因为俯仰角可以根据式(7)估计出来,所以方位角近似解又可以表示为

2.2 角度跟踪测角方案选择
常用的测角方法有比相和差波束法、比幅和差波束法、顺序波瓣法、基于空间谱估计的测角法等。考虑本系统具体特点,适用的测角方法有直接比相法测角、相位和差单脉冲测角、子阵相关法测角,现从测角精度和实际接收信号特点方面选择最佳测角方法。
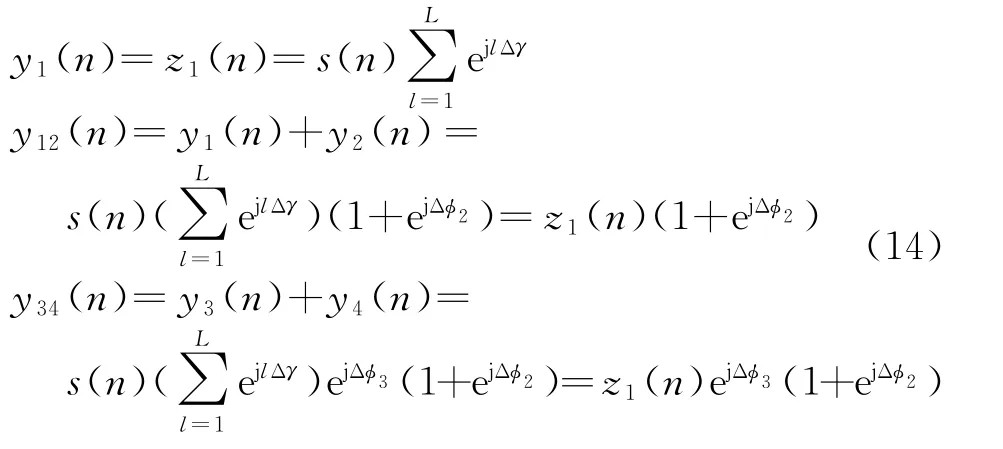
设各子阵结构完全相同,第1子阵输出信号为y1(n)=z1(n),为L个阵元的合成,即

且Δγ=γ0-γ,γ0是阵元波束指向的控制相位,γ是来波的实际空间相位。则其他各子阵输出为
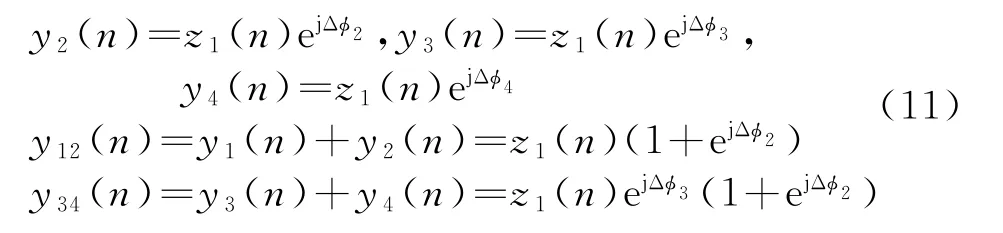
对于直接比相法测角

求得Δϕ2,Δϕ3,为

从式(11)可以看出,直接比相法测角中的两路信号均为理想信号,当信号的信噪比很低时,两路信号作除法运算难以得到相位差信息,即测角精度与输入信噪比有很大关系,当信噪比较低时,测角误差将会很大。
对于子阵相关法测角
求上述两子阵输出的互相关,有
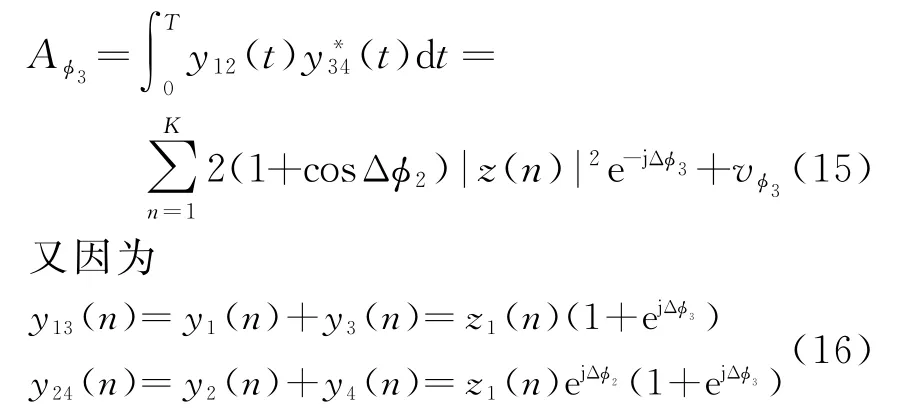
求上述两子阵输出的互相关,有
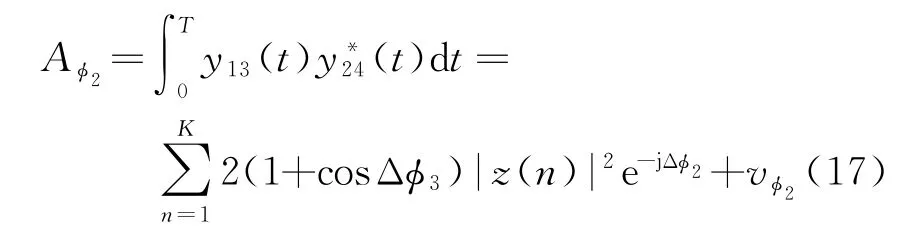
一般来说,上式的噪声功率可忽略,此时分别求出Aϕ3和Aϕ2的相位,需注意,此时的Aϕ3和Aϕ2的相位Δϕ3与Δϕ2之间的关系为

2.3 角度跟踪坐标变换
天线波束控制在阵面余弦坐标系中比较方便,目标位置跟踪滤波往往在地理坐标系下比较理想,系统工作离不开坐标的变转。
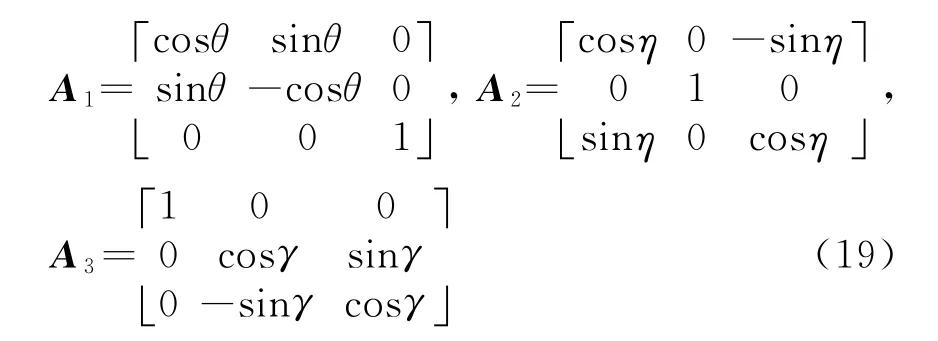
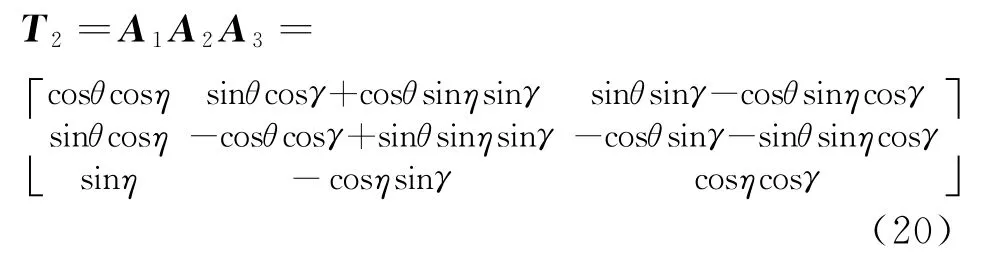
载体的姿态变化一般由载体分别沿机体坐标轴的滚动角来表示,包括航向角θ、俯仰角η和滚动角γ,它们分别表示绕机体坐标轴Z轴、Y轴和X轴的旋转角度,其相应的坐标转换矩阵为
根据上述变换矩阵,可获得从载机地理坐标系到机体坐标系的旋转矩阵为
此外,若天线坐标系与机体坐标系在各个轴向上存在一定的旋转角度,则可首先将天线坐标系按照上述类似方法转换至机体坐标系,再变换至载机地理坐标系。若统一坐标系为地固坐标系,还需要根据载机的状态信息,将载机地理坐标系变换至地固坐标系。
当在地固坐标系下确定指向的方位和俯仰角,则需要按照上述逆过程,依次转换至载机地理坐标系、机体坐标系和天线坐标系,用于控制波束指向。
2.4 角度跟踪算法
卡尔曼滤波(KF)算法为实现目标跟踪[6]的经典算法,该算法基于的目标运动状态方程和观测方程均为线性方程。该项目背景下,若建立常规的目标运动状态向量,其中的分量分别代表在统一惯性坐标系下,目标的位置、速度和加速度信息,它与观测向量[A,E]T之间建立的观测方程很显然为非线性方程,无法直接采用KF算法。
考虑到在统一惯性坐标系下,目标的方位和俯仰信息与之方向余弦信息之间存在着如下对应关系:
式中,X c,Y c和Z c分别代表惯性坐标系3个方向的方向余弦。KF算法用于估计方向余弦的值,下面以一个通道的方向余弦估计为例进行说明,其余两个通道类似。
假设离散化的运动状态方程为

观测方程为

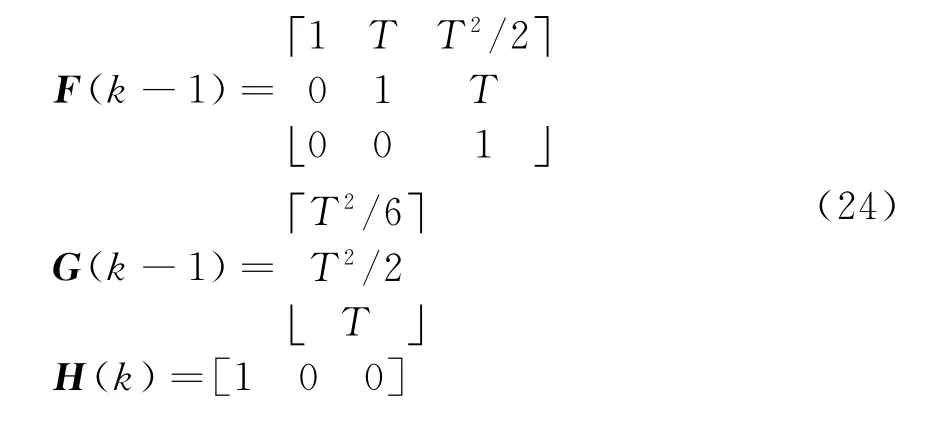
w(k)为该模型的过程噪声且服从零均值、方差为Q(k)的高斯分布,v(k)为量测噪声且服从零均值、方差为R(k)的高斯分布,它与过程噪声相互独立。滤波步骤如下:
在前面相同场景下,采用基于方向余弦的KF算法对目标方位和俯仰角跟踪。图5给出了对方位和俯仰角跟踪的均方误差曲线,与上面EKF算法的跟踪精度相比,基于方向余弦的KF算法精度较前者有所下降。
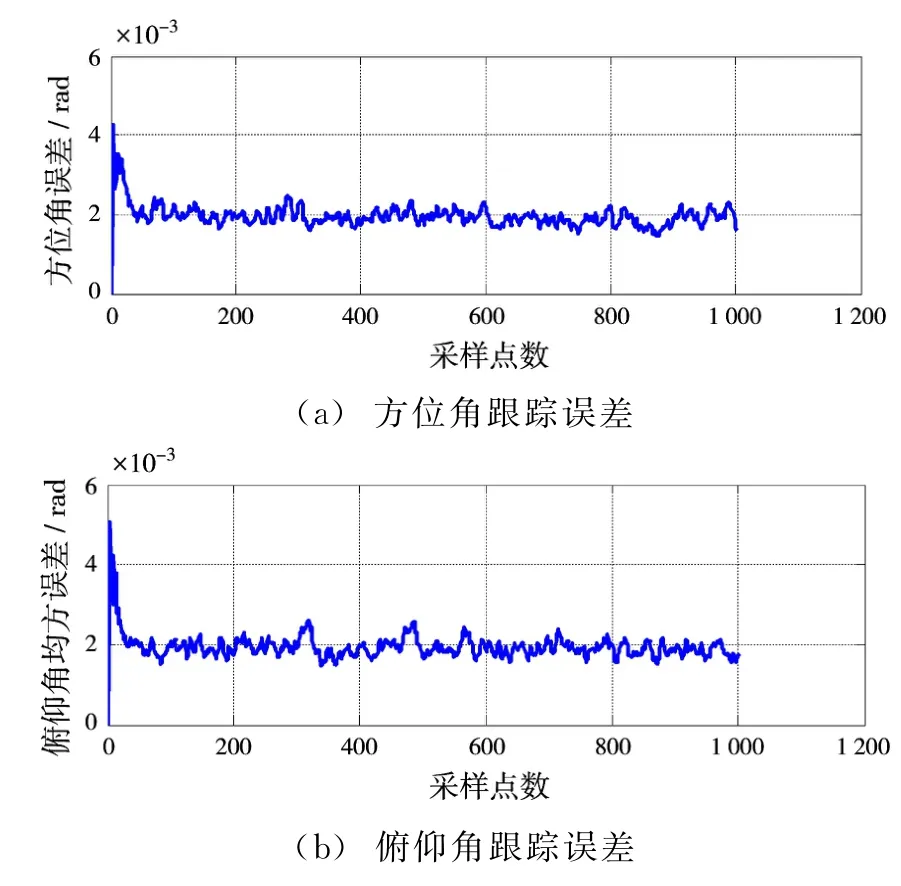
图5 方位和俯仰跟踪精度曲线
3 结束语
本文主要针对高速运动平台条件,完成相控阵卫星自跟踪系统方案设计;以双工通信为应用背景,建立卫星自跟踪系统大闭环跟踪模型。结合阵天线结构与接收通道特点,研究子阵相关测角方法,确定测角方案,针对平台运动特性和卫星运动特点,研究和发展稳健高效的Kalman滤波理论和实用算法,是实现高速运动平台的相控阵卫星自跟踪系统的关键。本文的讨论对工程实践具有一定的指导意义。
[1]张德.临近空间卫星通信天线伺服跟踪的研究[J].无线电通信技术,2013,39(2):52-54.
[2]王忠,张继宏.一种改进的数字式波束形成的快速自适应算法[J].电子对抗,1996(4):16-23.
[3]甘明.基于相控阵天线单脉冲测角算法的测角精度研究[J].现代电子技术,2013,36(7):89-93.
[4]YANG K,OHIRA T.Realization of Space-Time Adaptive Filtering by Employing Electronically Steerable Passive Array Radiator Antennas[J].IEEE Trans on Antennas and Propagation,2003,51(7):1476-1485.
[5]吴越,严济鸿,何子述.基于FPGA的多通道高速数据采集系统[J].雷达科学与技术,2012,10(6):671-676.WU Yue,YAN Ji-hong,HE Zi-shu.Multichannel High-Speed Data Acquisition System Based on FPGA and USB 2.0[J].Radar Science and Technology,2012,10(6):671-676.(in Chinese)
[6]PIEPMEIER J A,MCMURRAY G V,LIPKIN H.Tracking a Moving Target with Model Independent Visual Servoing:a Predictive Estimation Approach[C]∥Proceedings of the 1998 IEEE International Conference on Robotics&Automation,Leuven,Belgium:[s.n.],1998:2652-2657.
