水面杂波背景的统计MIMO雷达检测方法研究∗
2015-01-22马红星陈思佳
马红星,陈思佳
(1.海军驻合肥地区军事代表室,安徽合肥230000;
2.中国电子科技集团公司第三十八研究所,安徽合肥230088)
0 引言
雷达目标具有明显的闪烁特性,理论和实验都表明,雷达目标在方向和姿态上的微小变化,都会导致雷达回波(雷达散射截面积)的严重起伏,这种回波信号的起伏会严重影响传统常规雷达的检测性能,而新型的多输入多输出(MIMO)雷达[1-4],是一种发射或接收多个在时间、空间或者波形、极化等方面相互独立信号的雷达,它使用多个阵元检测目标特性,同时使用多个阵元接收回波信号的雷达阵列[5]。MIMO雷达可以利用观测目标在不同散射方向上的散射信息,减少传统雷达由于目标闪烁带来的检测性能的损失,有效提高对包括水面背景在内的多种背景下目标检测的性能。
在不同的散射方向上,雷达目标可以提供丰富的散射信号,考虑到地面、水面等环境对雷达目标不同部分散射信号的反射,雷达接收到的回波信号应该是各多径信号的叠加,这与通信中的角度扩展具有相似的特性,则相隔一定间距的两接收天线所接收到的信号有可能具有相互独立性。统计MIMO雷达天线间的距离比较大,可认为接收到的各路径信号满足不相关性。统计MIMO雷达从足够大的空间观测水面背景下的雷达目标,能够充分地利用水面杂波背景下目标的散射特性,全面地获取了目标空间散射截面积多样性的信息,与传统雷达相比,在信号检测能力、目标分辨率、参数估计精度等方面有明显的优点[6]。
通常,当分辨单元内有大量散射点时,可根据中心极限定理,考虑杂波为高斯分布。针对高斯杂波背景,MIMO雷达的算法被广泛研究,特别是针对统计MIMO雷达检测方法的研究[7],但是这些高斯背景下的检测器在非高斯杂波背景中,检测性能会受到影响。然而,在许多实际数据中,杂波背景会表现出非高斯分布的特性。
在现有针对水面杂波实测数据的分析文献中,主要针对加拿大Mc MasterIPIX雷达的实测水面杂波数据,对水面杂波数据的拟合分析结果表明:对不同情况下的实测水面杂波,非高斯簇中的K分布[8]或IG-CG分布[9]有良好的拟合效果。其中,K分布是一种用于描述实测复杂海面杂波数据的经典杂波模型,通过对海杂波物理组成机理的理论分析与实测数据的深入研究,文献[8]说明K分布可以对各种尖锐程度不同的杂波回波进行建模,对复杂的海杂波具有很宽的适应性。因此,针对K分布杂波背景,文献[10]讨论了针对MIMO雷达的纽曼-皮尔逊(NP)检测器的设计,然而,该检测器需要知道目标的先验信息,并且不具有自适应的检测特性,而最近提出的IG-CG分布对水面杂波,特别是湖面实测杂波数据具有良好的拟合结果。
因此,针对这两种对实测水面杂波数据拟合效果良好的模型,综合分析这两种分布下现有MIMO雷达自适应检测方法的推导过程,对不同水面背景上未知目标先验信息的检测器性能进行分析,对其中可用于工程上实现检测算法性能改善的参数条件进行了归纳,为MIMO雷达的工程化应用提供了目标检测方面综合性的参考。
1 信号模型
雷达目标通常由许多散射体构成,假设雷达目标包含Q个散射点,每个散射点的强度为σq,雷达波长为λ,相对波程差为Θq,则目标的雷达截面积[11]可以计算如下:

式中,exp(·)表示指数运算。从式中可知,目标的雷达截面积与目标尺寸、探测频率、形状以及观测角度都有很大的关系。而目标的雷达散射截面积决定了目标回波幅度大小。在传统雷达中,目标扫描角有1 mrad的变化,回波能量都有可能会出现10 dB的波动,而如图1所示,对于水面背景上的飞行器,其雷达散射截面积会随着空间观测角的不同而强烈地起伏,观测方向的微小变化所导致的雷达散射截面积起伏可达5~25 dB,这严重影响了传统雷达的检测性能。
同时,图1也说明了目标散射产生的回波具有空间独立性。当从差异足够大的两个角度对目标进行探测时,接收到目标的回波是独立的。如果在足够广的区域上布置雷达天线,使它们能相互独立地观测目标,然后利用这些独立的观测数据,可以获得由目标散射的角度扩展所带来的检测性能改善。这种性能提升的关键思想是:对于单个传统雷达,观测到小的目标截面积的概率较大,而多个独立的观测结果同时对应小的目标回波幅度的概率则很小。这样,通常被视为缺点的目标雷达截面积起伏被MIMO雷达加以利用,从而有效改善了系统的性能。
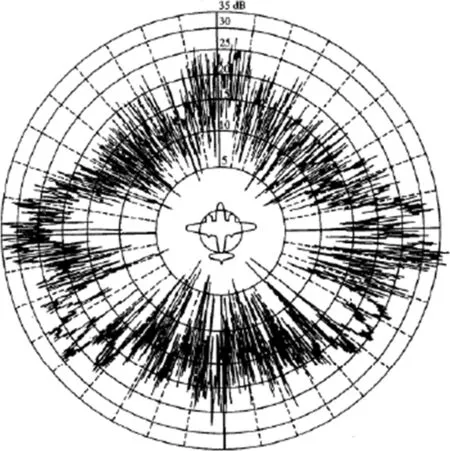
图1 目标的雷达信号后向散射
如图2所示,统计MIMO雷达系统使用具有很宽间隔的发射-接收天线,各发射天线可发射相互正交信号,它将一个发射天线经过目标到一个接收天线的信号看作为一个信道,两信道只要满足下式中的一项[12]:
那么目标就在这两个信道呈现出相对独立的反射特性。式中:(X li,Y li)和(X lj,Y lj)分别是第l i个和第l j个发射天线的坐标;(X mi,Y mi)和(X mj,Y mj)分别是第m i个和第m j个接收天线的坐标;r li和r mi分别表示第l i个发射天线和第m i个接收天线到目标的距离;ΔX和ΔY分别表示目标沿X轴和Y轴的长度。若MIMO雷达的所有信道都满足独立条件,则可称为统计MIMO雷达。
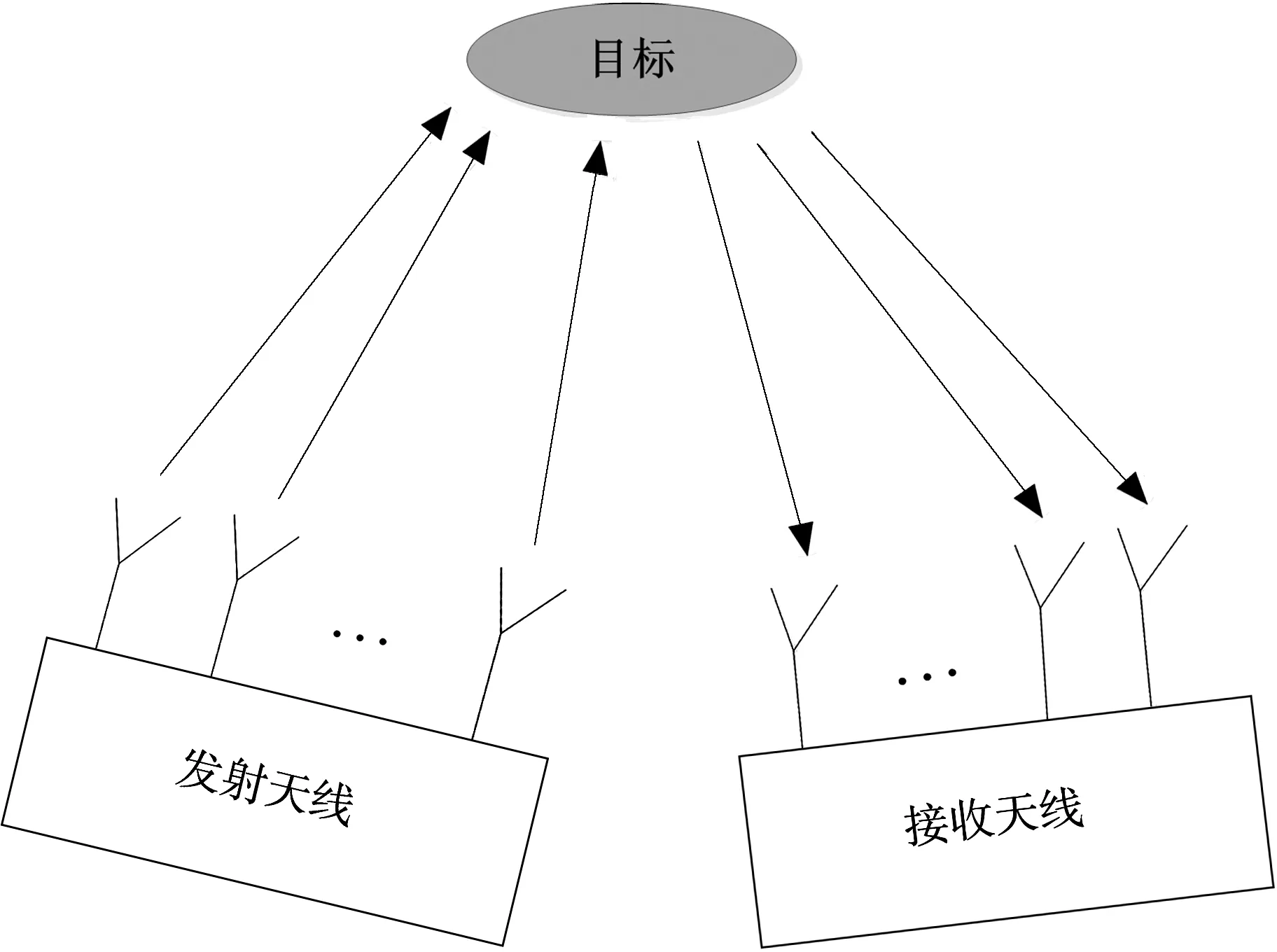
图2 统计MIMO雷达收发天线配置图
假设统计MIMO雷达系统的发射天线数为L,接收天线数为M,而发射-接收天线对之间的间隔足够大,这样使得任何发射-接收天线对,可以提供不相关的感兴趣目标的散射特性,每个发射天线发射相互正交的信号。
假定一个相干处理间隔内包含N个脉冲,同时,第m个接收天线接收到的回波可表示为:所有发射天线的发射信号经过目标散射信号的叠加,该信号经过匹配滤波采样后,可表示为待检测单元数据z m=[z m(1),…,z m(N)]T∈C N×1(C表示复数空间),m=1,…,M,(·)T表示转置操作,并且假设有K个不含有目标信号的辅助数据z mk,k=1,…,K,辅助数据和待检测单元数据具有相同的协方差矩阵结构。
在杂波为主的环境中,二元假设检验问题[11]可以表示为

式中:A=[a1,…,a L]∈C N×L表征编码矩阵,其中,假定A满足条件N>L,发射码字a l=[a l,1,…,a l,N]T∈C N×1,l=1,…,L;αm=[αm,1,…,αm,N]T∈C L×1,m=1,…,M,其中,αm,l(l=1,…,L)表征从第l个发射天线到第m个接收天线的传输通道的衰减和目标散射等因素对信号幅度和相位产生的影响;c m表示杂波信号。
2 K分布杂波背景下的检测方法
海表面主要由两种类型的波组成:波长较短的毛细波或风波;与波长较长的重力波。毛细波指的是传播速度主要由水的表面张力控制的波,长度一般小于2.5 cm的水浪被认为是毛细波;重力波则指的是由重力控制主要传播速度的波,当水浪或海浪的长度大于5 cm就被认为是重力波。因此可以使用含有两个分量的K分布模型来描述海杂波。同时,对实测无目标的海杂波数据样本进行分析,K分布模型的拟合效果也最好[8]。
K分布杂波由两部分构成,表示如下:

式中:s m为非负随机变量,可用来表示杂波纹理分量;x m表示N维零均值的复高斯向量。假定接收天线的杂波信号之间相互独立且同分布。则杂波信号的概率密度函数表示为
式中,(·)H表示共轭转置操作,‖·‖表示行列式计算,R m表示杂波协方差矩阵。
K分布的纹理分量的概率密度函数p(s m)可以表示为

式中,v和u分别表示杂波的形状参数和尺度参数,Γ(·)表示伽玛函数,假定为统计期望操作。
于是,可以算得p(c m)的闭合表达式为

式中,Kϱ(·)表示阶数为ϱ的第二类修正贝塞尔(Bessel)函数。
根据纽曼-皮尔逊(NP)准则下的最优检测理论,上述二元假设检验的最优接收机为似然比结构(LRT)[11],且接收天线间不相关,因此,可以得到
式中,Rx为单位功率杂波的复高斯向量xm的协方差矩阵结构,p(z1,…,zM|H1)和p(z1,…,zM|H1)分别为H1和H0假设下的似然函数,γ为与虚警概率Pfa有关的检测门限。
由于最优似然比检测需要对所有的参数都已知,但在实际中,αm或协方差矩阵结构Rx一般是未知的。因而,最优似然比检测器一般是无法获得的。于是,可以采用一种较有效的两步广义似然比(GLRT)准则,而广义似然比准则是在似然比结构中,用未知参数的最大似然估计来代替未知参数的真实值,而两步广义似然比准则的第一步为首先假定Rx已知,来得到广义似然比的结果:
而可以得到αm的最大似然估计为

把式(10)和K分布纹理分量的概率密度函数都代入到两步广义似然比准则中,经过必要的数学运算,可以得到[11]
而两步广义似然比准则的第二步是对协方差矩阵结构进行计算,其计算方法将在后文介绍。
3 IG-CG杂波背景下的检测方法
近年Ollila和Tyler等学者对实测湖面杂波的数据样本进行了经验分析,研究结果表明IG-CG分布模型对实测湖面杂波数据的拟合效果最佳, IG-CG分布模型可表示为

式中,ε为形状参数,斑点部分分量x是N×1维均值为零、协方差矩阵为Rx=E[xxH]的复高斯向量。
在假设H0下,根据IG-CG杂波的概率密度函数[9],可得到zm的概率密度函数,表征为其中,纹理部分分量τm服从均值为1的逆高斯分布,它的概率密度函数[9]可以表征为
在假设H1下,得到zm的概率密度函数,表征为
再根据两步广义似然比准则,第一步,可以得到IG-CG分布杂波下MIMO检测器结构[13],表征为
而αm的最大似然估计可表征为

第二步,对于K分布或IG-CG分布杂波背景中的检测器,都采用辅助数据来估计协方差矩阵,估计方法采用固定点估计方法,表征为
而采用固定点估计器[11]式(18)对纹理分量和协方差矩阵结构都具有恒虚警(CFAR)特性。
水面杂波模型可以对观测到的水面杂波的各种现象进行解释,对理解物理产生机理和电磁因素在杂波信号形成过程起作用。同时,在实测水面杂波数据还没有很充足的情况下,可以用于对MIMO雷达接收机的检测算法首先进行仿真杂波环境下的测试。
4 检测效果分析
由于复杂K分布和IG-CG分布下的MIMO雷达检测统计量的表达式[11,13]较难直接获得其相关的虚警概率的闭合表达式,因此,采用Monte-Carlo仿真方法对检测器的性能进行分析,虚警概率设为Pfa=10-2。
考虑统计MIMO雷达的发射矩阵为正交编码矩阵,且假定在一个相关处理间隔内N=8。在仿真中,目标的回波信号采用Swerling I型模型,而杂波分布的协方差矩阵结构都可以表示为

式中,|·|表示取模运算;ρ表示相关系数[13],可取值为0.9。
假定α1,…,αM为零均值独立同分布的高斯向量,其协方差矩阵表示为

在统计MIMO雷达中,信杂比(SCR)可定义为

式中,tr(·)表示迹运算。
首先对K分布下目标检测方法的性能进行仿真,实测海杂波数据测量结果表明,海情越高,海杂波的幅度分布偏离复高斯分布(或瑞利分布)越远,当形状参数越小,K分布与瑞利分布之间的差距越大[8]。在图3的仿真中,不妨假定形状参数v=0.5,分析在形状参数较小时,不同的发射或接收天线数,对检测性能的影响,而在检测性能曲线图中,通常采用Pd来表示检测概率。

图3 不同天线数下K分布杂波的检测器性能分析
从图3可以看出,当形状参数较小时,MIMO雷达对目标有良好的检测性能。同时,当目标信号的回波能量较弱或信杂比较低时,合理增加MIMO雷达的发射天线或接收天线数目能够较好地对此类目标进行检测。可见,在实际运用中, MIMO雷达检测器对目标检测具有较大的工程应用意义。而在天线数较少的情况下,增加发射天线数目(从2增加为4)比接收天线数目(从2增加为4)的检测效果要略优。
对于IG-CG分布杂波背景,分析了MIMO雷达检测器在增加发射天线数目或接收天线数目时的性能,仿真结果如图4所示。从仿真结果可以看出,对于IG-CG分布杂波,在收发天线数目较少的情况下,增加发射天线数(从2增加为4)的检测器性能优于增加接收天线数(从2增加为4)的检测器性能。
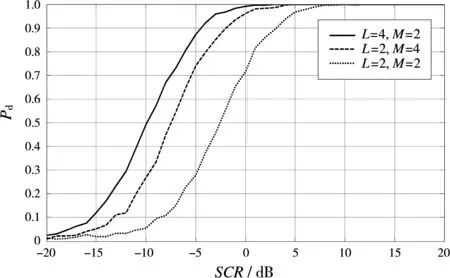
图4 不同天线数下IG-CG分布杂波的检测器性能分析
此外,还对在相同的发射天线和接收天线数下,不同情况的水面杂波中,MIMO雷达检测器的性能进行了对比。对于不同情况下的水面杂波分布,可以用不同的形状参数来表征[9]。因此,为分析多种情况下水面杂波的检测器性能,仿真参数设为:发射天线个数L=2,接收天线个数M=2,形状参数分别设为ε=0.5,2和5,检测性能的结果如图5所示。

图5 不同水面杂波的检测器性能分析
从仿真结果可以看出,对于不同情况下的水面环境背景,MIMO雷达的检测器都具有良好的检测性能,而当信杂比较低时,MIMO雷达检测器对目标也能具有良好的检测性能,而增加发射天线数目或接收天线数目,还可以提高对潜在目标的检测效果。
当天线数目较小时,在K分布杂波背景或IG-CG分布杂波背景中,当发射天线数目从2增加为4或接收天线数目从2增加为4时,增加发射天线数时的检测器性能要优于增加接收天线数时的检测器性能。因此,在实际工程的实现中,可先分析环境背景的杂波类型,再采用合适的检测方法和合理的收发天线数,实现对感兴趣目标的有效检测。
5 结束语
现代雷达针对的背景环境复杂多变,水面背景中的目标信号检测在实际中常常遇到,MIMO雷达利用了目标的散射特性,对在不同情况下水面背景中的目标具有良好的检测性能,选择合理的发射天线或接收天线数,能够有效地提高对目标的检测性能。通过对针对水面目标的典型检测算法的分析和仿真,为MIMO雷达对水面背景中目标检测的工程化应用,综合地提供了一定的技术参考。
[1]陈正辉,严济鸿,何子述.MIMO雷达OFDM-LFM波形设计与实现[J].雷达科学与技术,2013,11(1): 77-81,86. CHEN Zheng-hui,YAN Ji-hong,HE Zi-shu.Design for MIMO Radar and Implementation of OFDM-LFM Waveform[J].Radar Science and Technology,2013, 11(1):77-81,86.(in Chinese)
[2]陈正中,李小波,梁浩,等.正交频分LFM信号的MIMO雷达的匹配滤波技术[J].雷达科学与技术, 2013,11(2):197-202. CHEN Zheng-zhong,LI Xiao-bo,LIANG Hao,et al. Matched Filtering Technology for MIMO Radar with OFD-LFM Signal[J].Radar Science and Technology, 2013,11(2):197-202.(in Chinese)
[3]胡蜀徽,唐佳,王志华,等.正交频分LFM信号MIMO雷达的距离维高分辨[J].雷达科学与技术, 2014,12(6):585-591. HU Shu-hui,TANG Jia,WANG Zhi-hua,et al. High Range Resolution of MIMO Radar with OFDLFM Signal[J].Radar Science and Technology, 2014,12(6):585-591.(in Chinese).
[4]SPRENG T,PRECHTEL U,SCHONLINNER B,et al.UWB Near-Field MIMO Radar:Calibration,Measurements and Image Reconstruction[C]∥2013 European Radar Conference,Nuremberg:IEEE,2013:33-36.
[5]廖羽宇.统计MIMO雷达检测理论研究[D].成都:电子科技大学,2012:2.
[6]刘波.MIMO雷达正交波形设计及信号处理研究[D].成都:电子科技大学,2008:9.
[7]HAIMOVICH A M,BLUM R S,CIMINI L J.MIMO Radar with Widely Separated Antennas[J].IEEE Signal Processing Magazine,2008,25(1):116-129.
[8]张波.海杂波环境下的弱小目标检测方法研究[D].西安:西安电子科技大学,2013:33.
[9]OLLILA E,TYLER D E,KOIVUNEN V,et al. Compound-Gaussian Clutter Modeling with an Inverse Gaussian Texture Distribution[J].IEEE Signal Processing Letters,2012,19(12):876-879.
[10]YAZICI A,HAMURCU A C,BAYKAL B.A Practical Point of View:Performance of Neyman-Pearson Detector for MIMO Radar in K-Distributed Clutter[C]∥2009 IEEE/SP 15th Workshop on Statistical Signal Processing,Wales Cardiff:IEEE,2009:273-276.
[11]崔国龙.多天线配置雷达系统的目标检测算法研究[D].成都:电子科技大学,2012:9-12,20.
[12]晁淑媛.MIMO雷达若干关键技术研究[D].西安:西安电子科技大学,2011:2-3.
[13]CHEN S,CUI G,KONG L,et al.MIMO Radar Detection in Compound-Gaussian Clutter with Inverse Gaussian Texture[C]∥2014 IEEE Radar Conference,Cincinnati,OH:IEEE,2014:218-222.
