空间目标双基地雷达ISAR成像技术研究∗
2015-01-22
(北京跟踪与通信技术研究所,北京100094)
0 引言
随着航天技术的不断发展,人类的空间活动日益频繁,空间人造物体的数量和密度不断增加。为了保证载人航天、探月工程等飞行器安全,开展空间目标监视、识别等技术,已经成为十分重要的课题。
地基逆合成孔径雷达(ISAR)技术,由于其良好的横向距离分辨能力,连同宽带信号的高径向距离分辨能力,因而可以产生目标的精细二维反射率图像。双基地雷达以其在电子战中的独特优势与潜力,已成为现代雷达技术研究的热点问题。相对于常规的单基地雷达ISAR成像,双(多)基地雷达能够获取的目标信息更可靠、更丰富,系统也更安全。因此,利用双(多)基地雷达的优势开展ISAR成像在空间监测、导航制导、国土防空等方面将有着广阔的应用前景[1]。
1 双基地雷达工作参数设计
双基地雷达采用两个相距较远的基地,其中一个放置发射机,另一个放置相应的接收机。其中目标检测与单基地雷达类似,即发射机照射目标、接收机检测和处理目标回波。目标定位也与单基地雷达类似,但需要求解发射机-目标-接收机构成的三角函数关系[2]。图1给出了双基地雷达工作原理图,其中T x和R x分别为发射站和接收站,RT和RR为发射站和接收站到目标的距离,L为发射站和接收站之间的距离,称为基线,θT和θR分别是发射站和接收站的视角,β为双基地角。则根据双基地雷达方程可得

式中:σB(β)为与双基地角相关的目标雷达截面积函数;Ls=LTLR为由发射站和接收站共同决定的损耗因子。

图1 双基地雷达原理图
为了便于分析推导,引入“等效单基地作用距离”概念,将双基地雷达等效为单基地雷达研究。“等效单基地作用距离”即指具有相同发射机和接收机参数的单基地雷达的作用范围,记为RM。易见RM与(RTRR)max间满足关系:

为方便分析,将式(1)右边记为常数:

kB称为双基地雷达的最大距离积。这样,双基地雷达的最大作用范围可以表示为

由于雷达方程中损耗因子Ls未知,使用式(1)对双基地雷达作用距离进行估计存在较大误差,这里利用单基地发射站参数进行修正的方法得到。具体方法是,假定发射站在单基地方式下工作时的最大作用距离为Rm,比较单基地雷达方程和式(1),易知:Simin为发射站接收机的最小可检测信号功率;PRmin为接收站接收机的最小可检测信号功率;Cσ(β)为目标散射截面积的衰减因子。

因此,只要知道发射站、接收站相应雷达参数,就可估计出等效单基地作用距离,从而合理设计跟踪目标情况。同时,由式(6)可知,双基地雷达的最大作用范围是一个卡西尼卵形,即双基地雷达的威力范围随基线长度变化。因此,通过合理设计发射、接收站间基线长度,可实现双基地雷达对空间目标的ISAR成像。
2 空间目标双基地雷达ISAR成像
与空中目标逆合成孔径成像相比较,空间目标有一些自己的特点,例如,目标速度较快、成像处理的轨迹弧度较长以及目标距离较远等。这些都增加了空间目标高分辨成像的难度。
双基地雷达ISAR成像原理与单基地雷达ISAR成像原理基本相同,也是利用对宽带信号的距离压缩形成距离向的高分辨,得到一维距离像。在方位向上,同一距离单元内不同位置的点靠其相对于雷达旋转运动产生的多普勒频率进行分辨,从而实现ISAR成像[3]。
对于ISAR成像,雷达是固定不动的,目标相对雷达运动。目标的运动可以分解为平动和绕雷达视线转动两部分,后者对成像是有贡献的,因此应采用合理的成像算法消除掉目标平动的部分,提取目标转动的部分用于ISAR成像。图2为ISAR成像算法流程图。
从图中可以看到,ISAR成像过程一般包括速度补偿和运动补偿(包络对齐、相位校准)两部分。
速度补偿:对于高速运动的目标,各散射点的速度可分为平动速度和转动速度两部分。平动速度带来了目标的越距离单元徙动现象,并产生了脉内多普勒调制,造成目标的横向散焦。速度补偿就是要消除平动速度的脉内多普勒调制,仅保留对成像有贡献的转动速度部分。在单基地雷达中,目标位置可以通过窄带雷达跟踪得到,速度可以通过距离进行估计。对于双基地雷达而言,v是目标速度在发射站和接收站上的投影和,即发射径向速度和接收站径向速度之和,由于接收站不主动发射脉冲测距,因此速度和距离的耦合将导致接收站测速困难。在目标为轨道目标的情况下,可以利用目标的轨道数据,或目标坐标转换测量v与接收站目标距离解决这一问题[4]。

图2 ISAR成像流程图
运动补偿:成像前需要进行运动补偿来消除目标与雷达之间的平移运动而只保留目标相对雷达的转动运动,运动补偿分为包络对齐和相位校正两步,包络对齐使相邻重复周期的回波信号在距离向对齐,相位校正准则把目标距离走动造成的多普勒频移补偿掉。传统的相位校正没有采用外加校正源的办法,只利用了目标回波本身数据进行初相误差校正,即回波自聚焦。这一过程要求使用要求很高的精度,因此又称为精补偿,并且在很大程度上决定了成像的质量。而目前利用目标回波本身数据的自聚焦方法同样依赖目标的幅度信息,在回波信噪比较高的情况下,能够得到较精确的相位校正因子,给出较好的成像结果。但是,在低信噪比情况下,得到的相位校正因子会有较大偏差,从而造成初相校正误差并最终使图像散焦[5]。考虑到空间目标自身的运动规律,本文采用了利用轨道目标本质上为合作目标的特性,结合轨道先验信息,对回波进行相位补偿,从而使回波在脉间相参,摆脱相位补偿对回波幅度信息的依赖,提高成像性能。
假设发射信号可表示为

发射时刻为慢时间t m=m T(m=0,1,2,…),快时间信号包络为矩形脉冲为中心频率,τ为脉冲
宽度,μ为调频斜率。

式中,Tref为参考信号的脉宽,它比τ要大一些。参考信号的载频信号exp(j2πf0t)与发射信号的载频信号相同,保证良好的相干性。
若某散射点目标到雷达的距离为R i,雷达接收到的该目标回波信号为
若令RΔ=R ci-Rref,则其差频输出为

对于运动较稳定,运动轨迹有规律性的空间目标。由于运动轨迹的规律性,且一定成像时间内,随机相位误差很小,基本在π/4误差范围内。在包络对齐之后,方位向的一次相位误差只使得目标位置在方位向有个平移,不会使得目标分辨率下降。因此可以使用轨道先验信息,确定目标散射中心到雷达的距离Rref,产生对应的参考信号,对回波数据作解线调处理。这样,解线调后的差频与RΔ成正比,完成了回波的包络对齐。当目标参考距离足够精确时,从式(12)可以看到,解线调后信号的相位仅包含目标的转动分量,并将留在距离向FFT后的回波中,因此相参处理同时还完成了对回波的相位补偿。
对于ISAR成像,分辨率是决定成像质量的重要参数[6]。与单基地雷达类似,双基地雷达的距离分辨率同样受带宽制约,其在电磁波传播路径上的距离分辨率仍为,其中B为信号带宽,c为光速。但由于双基地角的存在,使距离像与传播路径存在夹角,同时造成目标速度在入射、反射两条路径上投影,因此雷达的距离分辨率变为

从式(13)和式(14)可以看出,与单基地雷达ISAR成像相比,双基地雷达ISAR成像分辨率与目标双基地角有很大关系,而双基地角又由基线长短决定,因而基线越短,双基地角越小,成像分辨率越高。因此,在设计双基地雷达系统中,发射站与接收站的基线长度选择十分重要,需要在系统威力和成像分辨率间综合考虑,找出最优的适合于空间目标的双基地ISAR成像系统。
3 系统构建
利用靶场现有的单基地雷达系统,设计构建了可用于空间目标ISAR成像的双基地雷达系统,用于验证双基地雷达工程实现中的关键技术及对空间目标ISAR成像的效果分析。根据双基地雷达理论及ISAR成像分辨率等要求,本文在系统设计时主要从以下几方面进行了考虑:
1)发射站与接收站基线的选取
测量时,以无杆腔为例,首先关闭节流阀6与球阀9,打开充气支路的球阀10,打开节流阀7,使气缸快速充气直至活塞杆完全伸出,等到压力表5示数稳定后,关闭节流阀7与球阀10。然后在测量支路内,缓慢调节节流阀6,待流量计8示数为0时,打开球阀9,待流量计示数稳定时,流量计8的读数即为泄漏量。之后按相同方法测量有杆腔的泄漏量。
根据双基地雷达原理发射站与接收站基线的长度决定了雷达的威力、作用范围及分辨率,基线越长,雷达作用范围降低,双基地角增大,成像分辨率下降;而基线太短发射站与接收站的干扰将增加。因此应选择合适基线长度,尽量选择中长基线双基地雷达。根据双基地雷达理论,中长基线双基地雷达应满足:,从而可根据目前现有的单基地雷达分布构建适合的双基地雷达系统。
2)双基地角的选择
由于双基地角的存在,双基地情况下目标RCS主要分为准单基地区(β≤5°)、双基地区(5°<β≤135°)、前向散射区(135°<β≤180°)。在准单基地区和前向散射区双基地雷达的成像效果均会受到影响,因此应选择合适雷达布站使观测到的目标RCS在双基地区。
3)目标可见性分析
构建的双基地雷达用于探测目标时还应考虑:(a)对目标的观测时间应保证发射站、接收站同时可见;(b)构建的双基地雷达威力应能对需观测的目标实现探测、跟踪。
综合前面的分析及现有靶场条件,按照目前靶场单基地雷达的站点地理信息,通过计算选择了一台宽带目标特性测量雷达可以作为发射站,一台单脉冲雷达设备作为接收站,构建双基地雷达系统。并根据两台设备站点坐标及式(6)计算得到双基地雷达基线长度、等效单基地作用距离、最大作用范围等指标。同时,利用STK软件仿真了构建的双基地雷达可观测的部分空间目标情况,如表1所示。

表1 部分空间目标仿真情况分析
双基地基线长L=650.48 km;等效单基地作用距离RM=869 km;双基地雷达最大作用范围AB=6.4×105km2。
4 试验验证
在前面分析的基础上,构建了双基地雷达系统进行试验技术验证,这里主要对国际空间站(ISS)其中一圈次数据任意两个弧段进行了成像处理,这两个成像弧段的基本参数如表2所示。图3、图4分别给出了两个弧段的成像结果。
成像结果表明,构建的双基地雷达ISAR成像精度与图5所示单基地雷达成像精度基本相当。分析原因主要是由于受到原设备技术状态的限制,在后续工程中可通过合理设计发射、接收站工作参数来提高成像精度。但通过该系统的设计构建及技术验证可为后续开展多基地雷达ISAR成像系统工程化提供技术基础。

表2 ISS两个成像弧段的基本参数
注:采样间隔对应的距离:ts×c/2=0.042 m)
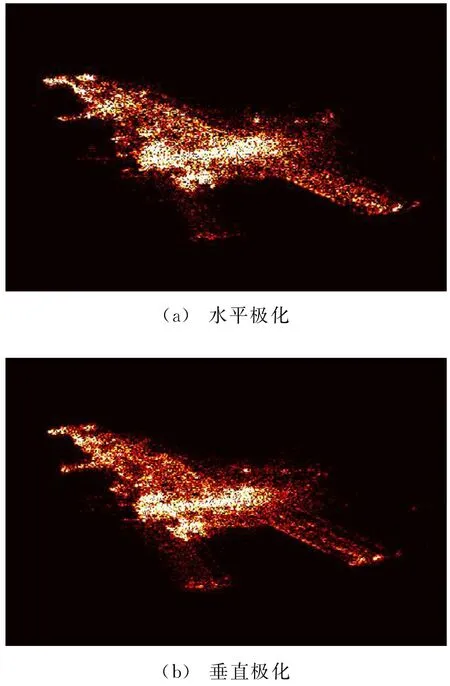
图3 成像弧段1对应的ISAR图像

图4 成像弧段2对应的ISAR图像(水平极化)

图5 单基地ISAR图像
5 结束语
通过对双基地雷达ISAR成像的系统分析,开展双基地雷达ISAR成像技术具有重要的军事意义。本文利用靶场现有资源进行分析计算,设计并构建了可在靶场应用的双基地雷达系统,通过跟踪空间目标进行了试验验证,并利用外场实测数据实现了双基地雷达的ISAR成像,因此具有较强的分析应用价值。在今后的工作中通过合理设置发射站、接收站雷达工作参数,使其互相匹配协调工作,必能得到很好的成像效果。总之,通过本文的研究为工程上开展双基地雷达ISAR成像提供了可靠的技术依据,充分证明了双基地雷达ISAR成像的工程可行性。
[1]李学勇.双/多基地雷达发展及关键技术[J].雷达与对抗,2013,33(2):4-8.
[2]徐晓靖,刘克胜,查林.一种基于DBF的双基地雷达系统的性能分析与实验研究[J].雷达科学与技术, 2004,2(6):327-332. XU Xiao-jing,LIU Ke-sheng,ZHA Lin.Performance Analysis and Experiment Research of a DBF-Based Bistatic Radar System[J].Radar Science and Technology,2004,2(6):327-332.(in Chinese)
[3]PALMER J,HOMER J,LONGSTAFF I D,et al. ISAR Imaging Using an Emulated Multistatic Radar System[J].IEEE Trans on Aerospace and Electronic Systems,2005,41(4):1464-1472.
[4]董健,尚朝轩,高梅国,等.空间目标双基地ISAR成像的速度补偿研究[J].中国电子科学研究院学报, 2010,5(1):78-85.
[5]赵维力,张群,朱小鹏.双基地ISAR运动补偿算法[J].火力与指挥控制,2012,37(6):100-102.
[6]DENG D,ZHANG Q,LUO Y,et al.Resolution and Micro-Doppler Effect in Bi-ISAR System[J].Journal of Radar,2013,2(2):152-167.
