一种改进的基于背景自适应的杂波图算法
2020-12-25王志刚王静娇翟栋梁
王志刚,王静娇,翟栋梁,洪 畅
(中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
雷达的基本功能是利用电磁波的反射对接收的回波进行处理,消除环境中非目标的反射回波信号,从中获得所需目标信息。[1]杂波为常见的非目标信息,由于其在空域分布上的变化明显,而在时域周期扫描上却是稳定不变的,因此依靠对时间采样估计背景杂波功率水平可以有效进行杂波抑制,改善目标的检测性能。[2]
杂波图技术即是基于杂波时域平稳的特性,将天线扫描到的空间分为若干个杂波单元,然后再把杂波信息处理后按照划分的单元进行存储。它能实时地对雷达杂波的信息进行记录和更新,从而方便分析杂波的特性,及时改变雷达信号处理的过程,提高雷达整机的性能,适应复杂多变的杂波环境。
杂波图按照建立的维数不同可分为平面杂波图和立体杂波图。[3]平面杂波图按照距离-方位将雷达探测的范围划分为若干个单元,是二维的平面投影,在绝大多数三坐标雷达及测高雷达的应用中存在严重缺陷。基于此,立体杂波图添加一维仰角维,按照距离-方位仰角将雷达探测范围进行三维划分,有效去除不同高度杂波对杂波图构建的污染。[4]
本文首先详细介绍常规立体杂波图原理,在此基础上提出并构建t-n型改进的基于背景自适应(Modified Context-based Adaptive,MCA)杂波图。为避免不同仰角和方位上杂波的互影响,MCA杂波图对每个波位单独构建杂波图,并利用慢时间维的检测单元最大值进行杂波图均衡化。为减少异常值和运动目标对杂波图的影响,MCA杂波图根据背景进行自适应选择遗忘因子。为有效检测出低速运动目标,建立基于跳帧的t-n型MCA杂波图。
1 常规立体杂波图
常规立体杂波图[5-6]检测技术将雷达观测区域分为距离、方位及仰角单元,以天线扫描周期为周期进行采样。杂波图存储的是每个距离、方位及仰角单元的杂波强度。每个单元的值依靠本次扫描和多次扫描结果来迭代更新。利用遗忘因子对本次扫描进行加权,并把更新后的值作为当前杂波背景的估计,其杂波单元如图1所示。
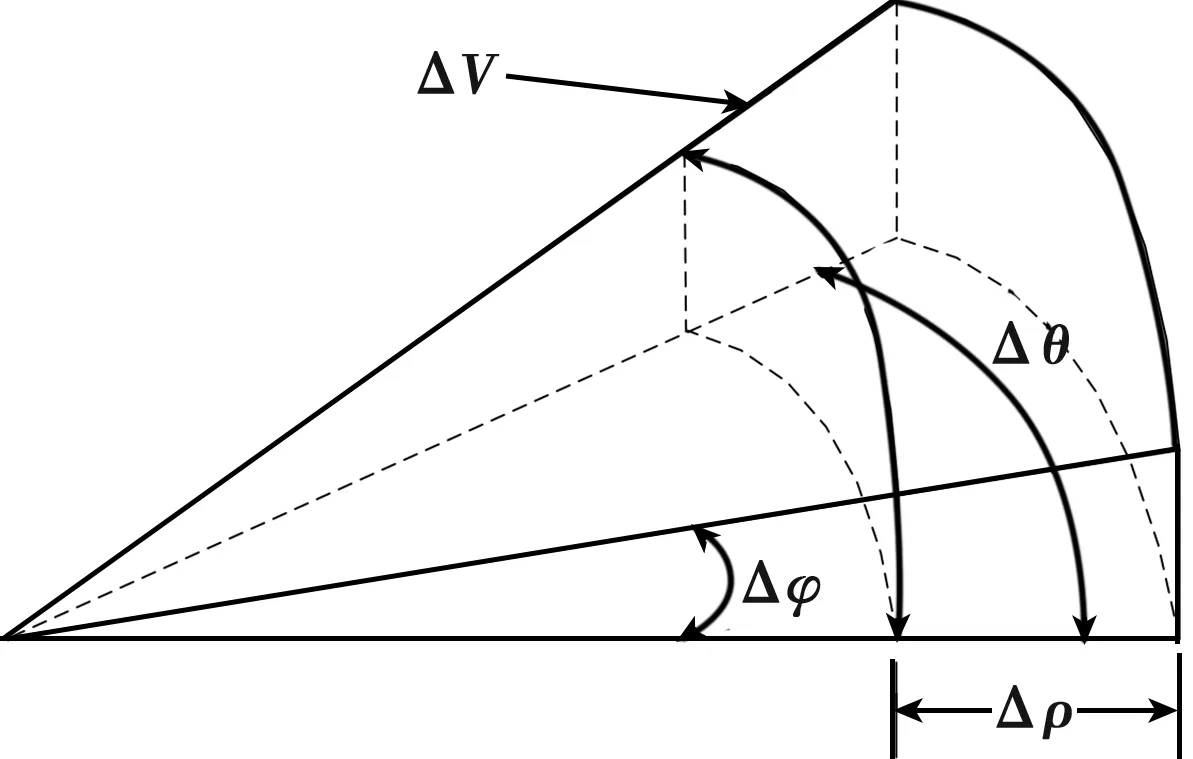
图1 立体杂波图杂波单元
图1中,Δφ为杂波单元仰角的跨度,Δθ为方位角的跨度,Δρ为径向距离,ΔV为三维杂波图杂波单元。杂波图幅度估计即计算出图1中杂波单元ΔV内杂波功率的递归值。设杂波单元内仰角维上雷达脉冲个数为m,方位维上雷达脉冲个数为n,距离分辨单元数为l,单个脉冲重复周期内仰角上扫描的角度为Δα,单个脉冲重复周期内方位上扫描的角度为Δβ,每个距离分辨单元长度为τ,回波在每个仰角、方位及距离单元上的幅值为x(i,j,k),杂波单元内幅值的平均为X(i′,j′,k′),则杂波单元的仰角、方位及距离的范围为
Δφ=mΔα, Δθ=nΔβ, Δρ=lτ
(1)
杂波单元内幅值的平均为
(2)
其中,i,j,k为回波单元在仰角、方位及距离上的坐标,i′,j′,k′为杂波单元在仰角、方位及距离上的坐标,t表示第t个天线扫描周期。杂波图技术即针对天线多次扫描形成的所有杂波单元内的数据作加权积累:
Ut(i′,j′,k′)=qUt-1(i′,j′,k′)+(1-q)Xt(i′,j′,k′)
(3)
其中,Ut-1(i′,j′,k′)为前一个周期经过天线扫描之后获得的杂波图的幅度递归值,q为递归系数。依据式(2)获得雷达天线此时扫描所在周期内的杂波幅度的平均值,再将此数据参与到递归滤波器中,从而更新前一个周期内获得的杂波图。对递归滤波器的系数选择需考虑到当前回波对历史信息的影响,选择系数越大杂波图背景更新越快。
2 跳帧均衡化自适应杂波图
MCA杂波图的基本思想与常规杂波图相同,即利用更新的杂波图来进行目标检测。但MCA杂波图算法的遗忘因子根据背景进行自适应选择,以减少运动目标及异常值对于杂波图构建的影响。利用慢时间维的检测单元均值进行杂波图均衡化,为后续的检测门限设置提供便利。同时,利用跳帧的杂波图提高部分低速目标的发现概率。
2.1 自适应遗忘因子选择
MCA杂波图对单波位回波进行杂波图构建,其估值模型如下:
Ut(i′,j′,k′)=qtUt-1(i′,j′,k′)+(1-qt)Xt(i′,j′,k′)
(4)
其中,Ut(i′,j′,k′)为杂波检测单元估计均值,Xt(i′,j′,k′)为当前帧杂波检测单元幅度,可通过单元选大/选小、单元平均或有序统计确定,t为天线扫描帧数。而遗忘因子qt可根据图2判断准则进行选择。
图中,T1和T2为杂波背景波动起伏程度的阈值,kcoef为根据背景进行自适应选择的遗忘因子系数。如果当前帧检测单元幅度与历史扫描杂波幅度估计比高于一定阈值T1时,MCA杂波图会使杂波图更新较慢,给予存储杂波图均值的权值较大,减小异常大值或运动目标对杂波图的影响。如果当前帧检测单元幅度过小时,MCA杂波图会使杂波图更新较快些,给予存储杂波图均值的权值较小,减小运动目标拖尾对杂波图构建的影响。其他幅度时,MCA杂波图的均值按照类似于常规杂波图的估计模型进行更新。
2.2 杂波图均衡化
MCA杂波图利用慢时间维的检测单元均值进行杂波图均衡化,其模型为
Nnorm=a×(xt-Ut-1)+b
(5)
其中,t-1是前一帧标识,Ut-1为前一帧的均值估计,xt是当前帧检测单元的幅值,a和b是杂波图估值均衡化处理使用权值和偏差值,这样检测门限可设置为一固定值。
2.3 跳帧杂波图构建
如图3所示,假设运动目标作径向离心运动,速度为每秒v个距离单元,距离维宽度为w个距离单元,雷达扫描一圈周期为Tperiods,则在第k′距离单元目标需要w/(vTperiod)圈通过该距离单元。
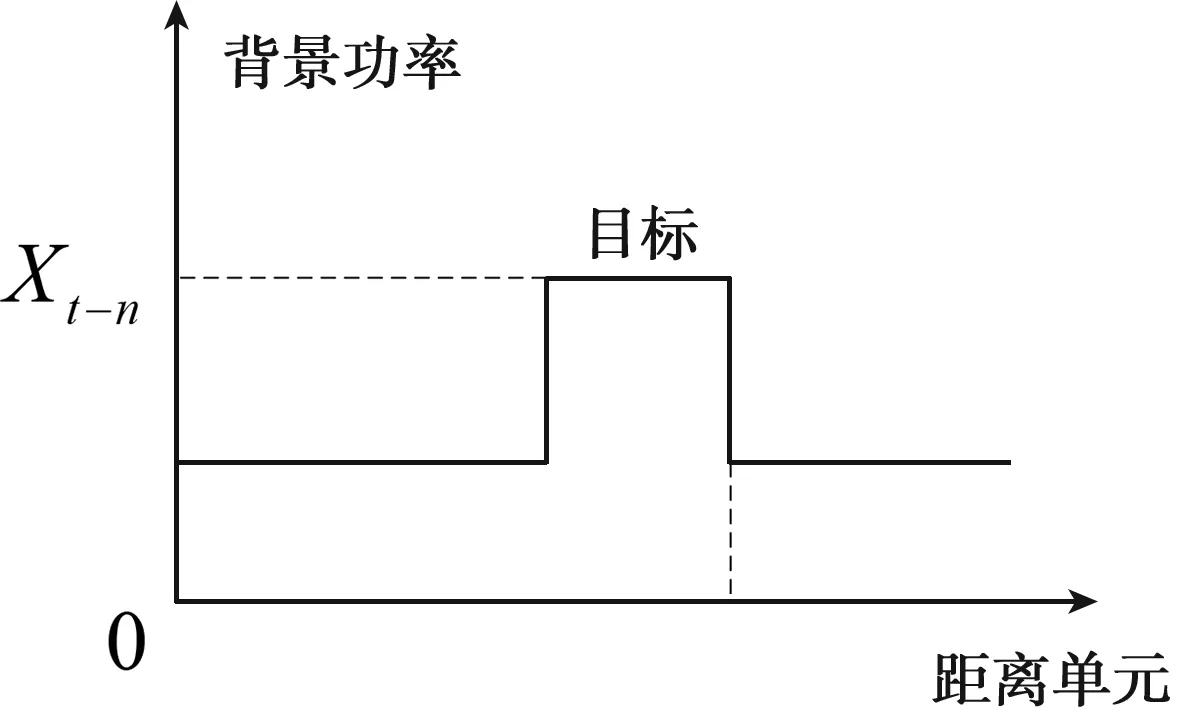
图3 雷达回波
当v越小时,所需时间越长,递归滤波器迭代次数越多,k′处目标对背景杂波图的构建污染程度越深。所以,针对慢速运动目标,MCA杂波图使用当前圈前第n帧的均值进行回波信号均衡化,其模型为
Nnorm=a×(xt-Ut-n)+b
(6)
其中,t-n是当前圈前第n帧的标识,Ut-n为t-n时刻的均值估计,其他参数同上。
3 仿真与测试
假设噪声与背景杂波服从高斯分布,背景功率为20 dB(信号是数字量,以1作为基底比较)。常规杂波图通过平方律检波器进行检波,遗忘因子为1/8;MCA杂波图遗忘因子参数设置为{15/16,7/8,3/4},不同检测单元的遗忘因子根据背景自适应选择,杂波检测单元幅度通过单元选大确定。
3.1 杂波及异常值抑制性能
假设噪声和背景杂波服从高斯分布,背景功率为20 dB,其他参数配置同上。异常值仅出现在第80帧回波,分布在距离单元200~205内,功率为30 dB。固定杂波分布在400~450距离单元内,功率为27 dB。那么,第80帧形成的稳定杂波图如图4所示。
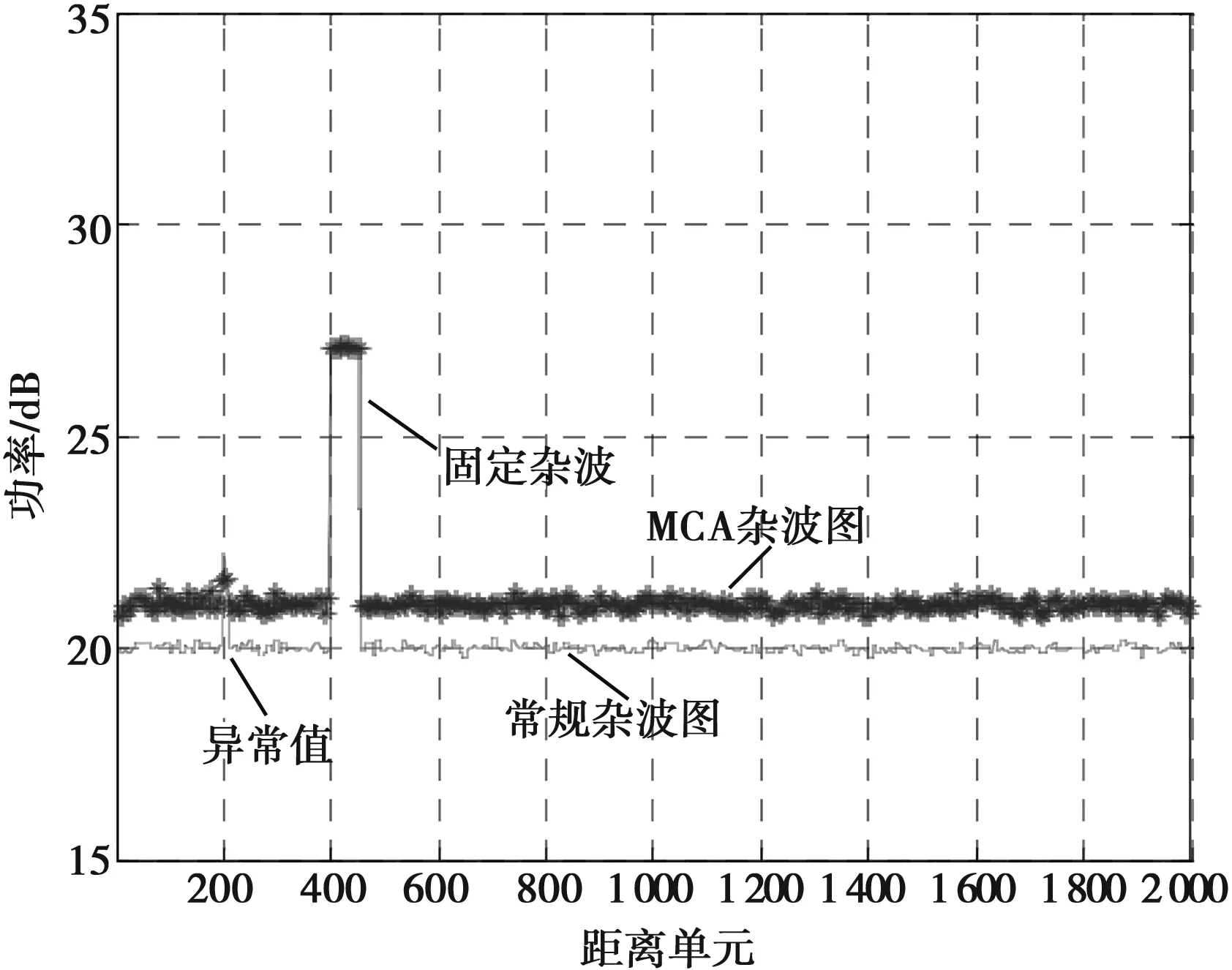
图4 杂波及异常值抑制性能比较
由图4可知,对于固定杂波,常规杂波图和MCA杂波图在迭代收敛后形成的杂波图相似,分别稳定在杂波单元的均值和最大值。但是,常规杂波图对所有背景作相同的更新迭代处理,导致异常值处的杂波图功率值偏高,明显造成杂波图污染。而MCA杂波图根据环境背景自适应选择遗忘因子,当出现异常值时降低当前帧的权值,有效地抑制了异常值的影响。
常规杂波图和MCA杂波图对当前帧回波数据的处理效果分别如图5和图6所示。
由图5可知,对于固定杂波,其时间维上连续帧的幅值相近,所以当前帧的幅值和历史帧的幅值均值相近,常规杂波图通过门限检测能有效去除固定杂波。而对于当前帧突然出现的异常值,由于明显高于历史估计值,利用历史杂波图难以去除。
由图6可知,对于固定杂波,虽然其幅值远大于当前帧其他背景的幅值,但其时间维上连续帧的幅值相近,所以当前帧的幅值和历史帧的幅值均值相近,均衡化公式中的xt-Ut-n值较小。这样杂波均衡化的结果与其他背景均衡化的结果相似,通过门限检测能有效去除杂波。而对于当前帧出现的异常值,与常规杂波图相似,利用历史杂波图难以去除。但是,MCA杂波图能够保证异常值不对杂波图造成污染,避免后续帧利用历史杂波图进行运动目标检测而导致异常。同时可以看出,均衡化的检测门限设置相对便利。
3.2 运动目标检测性能
假设噪声与背景杂波服从高斯分布,背景功率为20 dB,其他参数配置同上。1个相对慢速运动目标初始在220距离单元,沿距离维的速度为0.25个距离单元/帧,功率为40 dB。两个邻近的相对快速运动目标初始状态分别在250和300个距离单元,沿距离维的速度为10距离单元/帧,功率为40 dB。第80帧形成的稳定杂波图如图7所示。
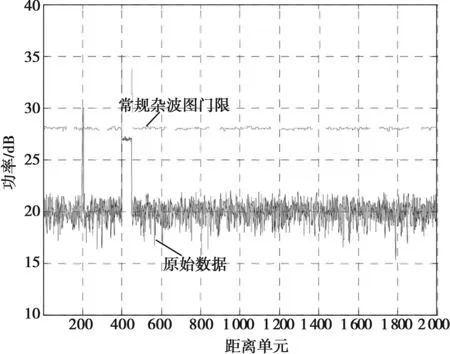
图5 常规杂波图性能
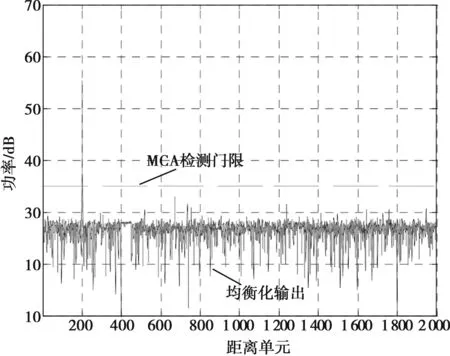
图6 MCA杂波图性能
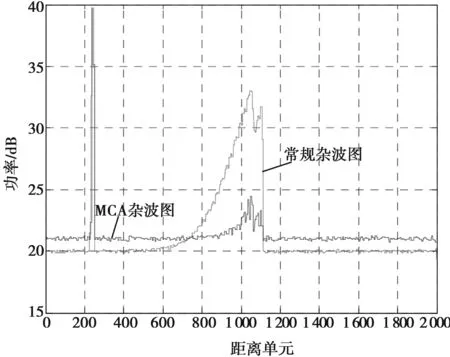
图7 运动目标对杂波图背景功率的影响
由图7可以看出,对于相对慢速运动目标,由于速度过慢,同一距离单元上的杂波图迭代次数过多,导致两种杂波图背景都受到污染。但是,MCA杂波图在目标离开某距离单元时,当前帧的权重为1/4,能更快地重新收敛于背景功率值。对于相对高速目标,由于其在距离上不断运动,导致当前帧相较于历史背景估计相差较大,MCA杂波图赋予当前帧的该距离单元上权值系数仅为1/16。这就使得其时间维上相对稳定,目标处起伏约为3 dB。而对于常规杂波图,由于遗忘因子始终为1/8,这样运动目标对背景的污染较为严重,起伏达到13 dB。
利用第79次更新的常规杂波图和MCA杂波图对第80帧的回波进行运动目标检测,检测结果分别如图8和图9所示。
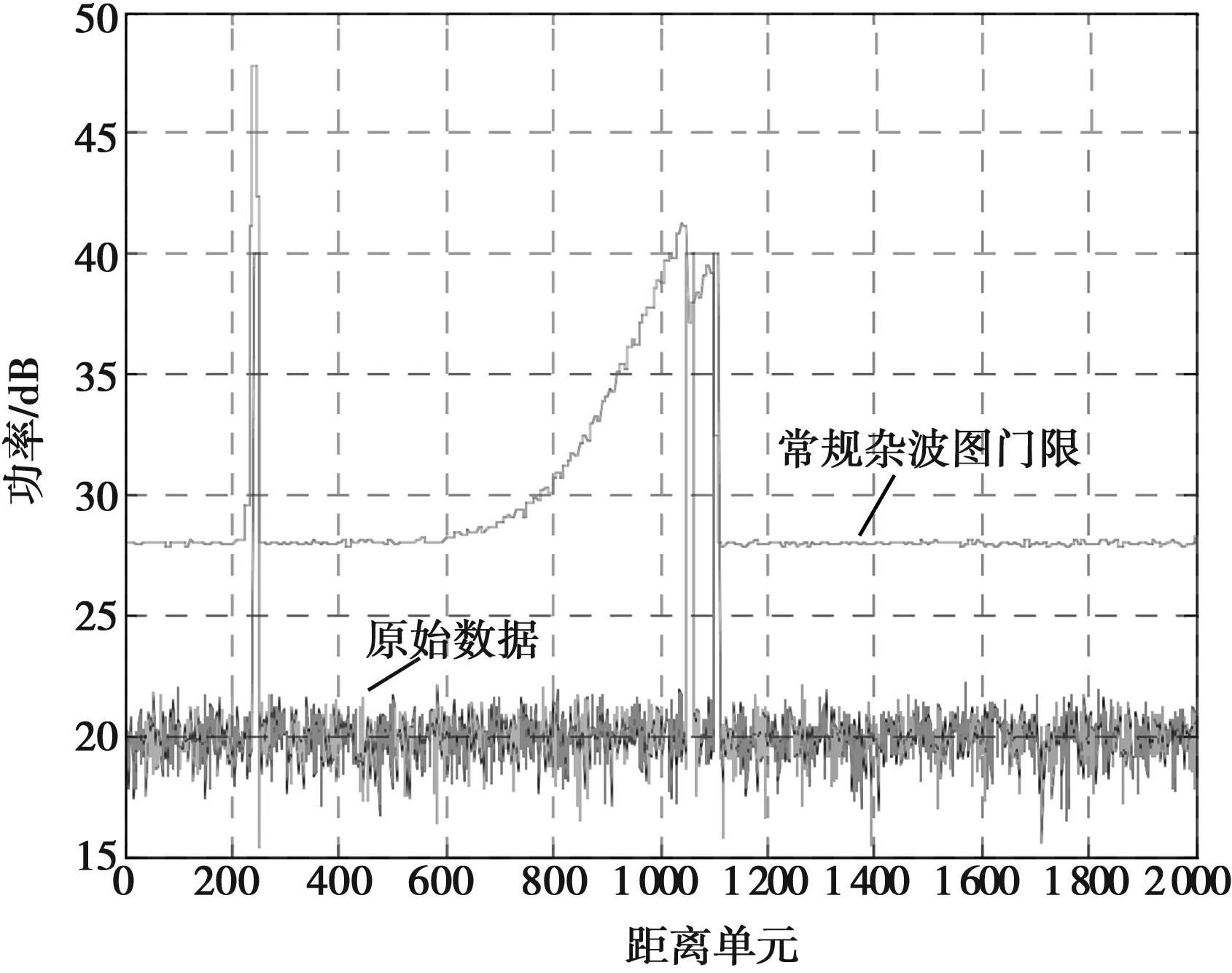
图8 常规杂波图目标检测结果
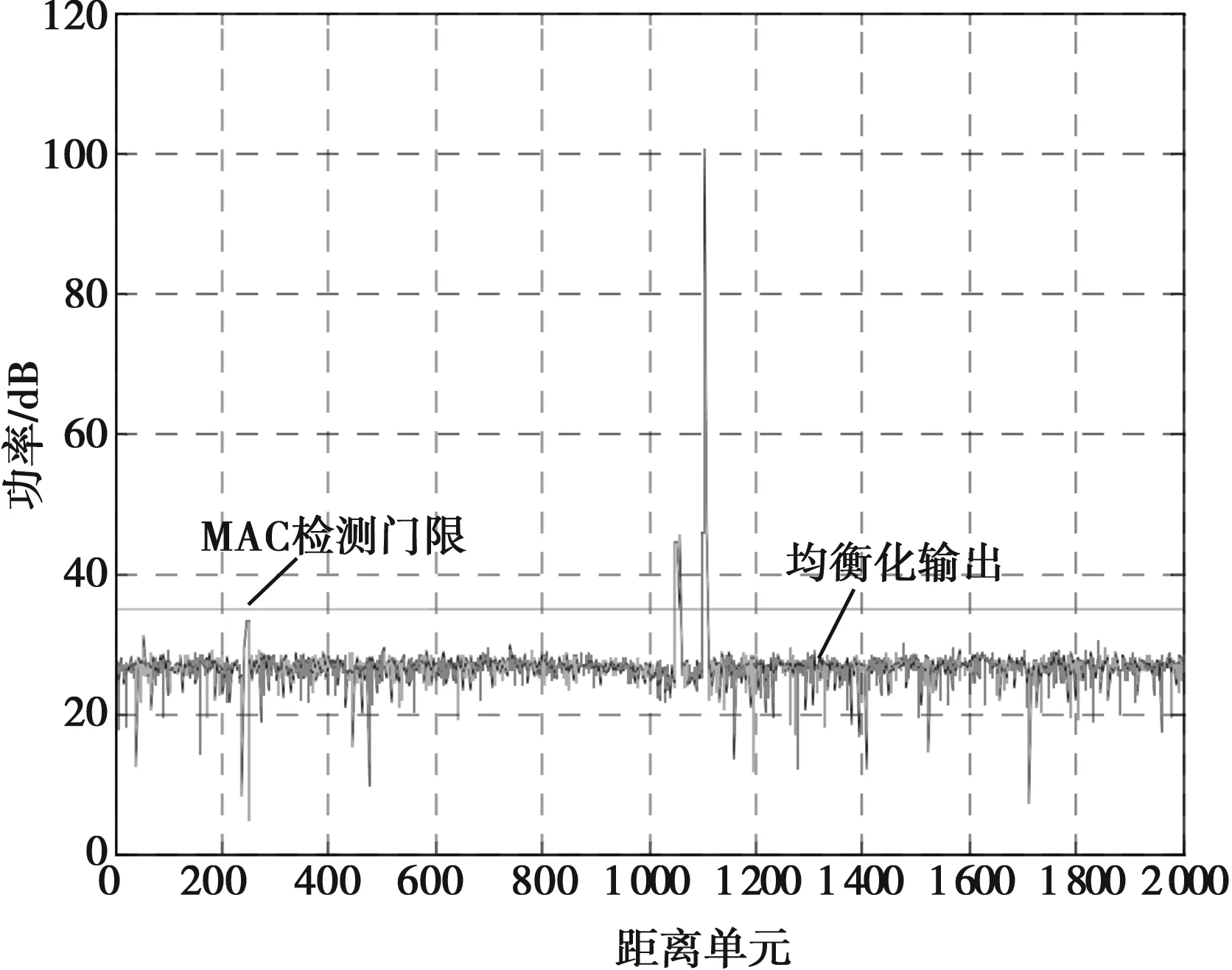
图9 MCA杂波图运动目标检测结果
由图8可以看出,由于运动目标对杂波背景功率估计的污染,被污染后的杂波图出现低速和邻近目标漏检现象。
由图9可以看出,对于低速目标,由于杂波图受到污染,MCA杂波图难以检测出该目标。
由图10可以看出,对于低速目标,t-n型MCA杂波图使用前n帧的杂波图进行检测,可以有效检测出目标。同时,当前背景更新率1/4,能够快速收敛,对检测性能影响较小。对于相对快速运动的目标,在当前距离单元中,由于当前帧的幅值远大于历史估计的幅值,这样当前的均衡化值远超其他背景的值,通过检测门限可以检测出目标。同时,因为目标在不同的扫描周期中,所处的杂波单元不同,且当目标回波第1次出现在某个杂波单元时遗忘因子减少为1/16。这就导致运动目标对背景估计影响较小,不影响杂波图的构建,从而对于邻近目标没有出现漏检现象。

图10 t-n型MCA杂波图运动目标检测结果
4 结束语
改进的基于背景自适应的杂波图对每个波位单独建立杂波图,并根据背景进行自适应选遗忘因子,减少目标及异常值对于杂波图的影响。t-n型杂波图有效解决慢速目标淹没问题,同时杂波图均衡化便于检测门限的设置。但是,MCA杂波图牺牲了大量存储空间来解决慢速目标,后续仍待研究相应的解决方案。另外,门限、系数、参数的设置是基于实际背景环境进行的大量学习和摸索,调节参数相对比较困难。
